【ManiDP】2021-CVPR-Manifold Regularized Dynamic Network Pruning-论文阅读
ManiDP
2021-CVPR-Manifold Regularized Dynamic Network Pruning
来源:ChenBong 博客园
- Institute:PKU,Huawei Noah
- Author:Yehui Tang,Yunhe Wang
- GitHub:/
- Citation:
Introduction
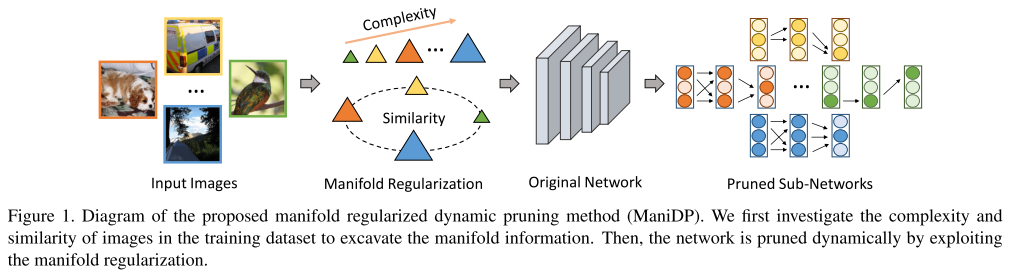
动态剪枝,对不同的输入样本使用不同的剪枝子网,实现了更高的精度和加速比(FLOPs剪枝率)。动态剪枝的核心问题是如何为不同样本分配不同的子网,即如何学习一个从样本到子网的映射函数。本文考虑了样本和模型的复杂度和相似度的对齐,从而使模型更好地将样本映射到对应的子网。
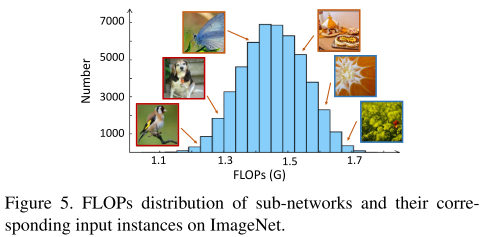
动态网络的方法保留了完整的网络结构和参数,因此网络参数其实没有减少;且 FLOPs 对不同的样本是不同的,因此本文汇报的是测试集上所有样本的平均 FLOPs。
Related Work
- Channel Pruning
- Static Pruning:GAL,HRank
- Dynamic Pruning
- Weight Pruning
Motivation
- 之前的静态剪枝方法不考虑输入的差异,用同样的静态剪枝网络处理所有输入
- 卷积核的重要性是 highly input-dependent 的,即不同输入对应的冗余卷积核应该是不同的;这其实就是动态网络的思想,动态网络是不同样本选择不同的结构(宽度,深度),本文的动态剪枝是不同样本剪掉不同的卷积核(宽度)
- 之前的动态网络/剪枝方法没有利用不同样本之间的关系,例如:简单的样本使用简单的子网(复杂度对齐);相似的样本使用相似的子网(相似度对齐)
Contribution
- 考虑了(样本,模型)复杂度和相似度对应关系的一种动态剪枝新范式
Method
静态剪枝
优化目标:


传统的动态剪枝
每一层都有一个control module \(\mathcal{G}^{l}\) (如SE:avgpool-fc-sigmoid),根据上一层的输出 feature map,来计算当前层的输出通道显著性vector: \(\boldsymbol{\pi}^{l}\left(\boldsymbol{x}_{i}, \mathcal{W}\right)=\mathcal{G}^{l}\left(F^{l-1}\left(\boldsymbol{x}_{i}\right)\right) \in \mathbb{R}^{c^{l}}\)
通道显著性vector \(\pi^l\) 再过一个阈值 \(\xi^{l}\) (大于阈值的取1,否则取0),得到该层输出通道的稀疏mask:\(\hat{\boldsymbol{\pi}}^{l}\left(\boldsymbol{x}_{i}\right)=\mathcal{I}\left(\boldsymbol{\pi}^{l}\left(\boldsymbol{x}_{i}\right), \xi^{l}\right)\)
这里的阈值 \(\xi^{l}\) 需要 layer-by-layer 地设置,进而决定 layer-wise 的剪枝率,某一层的阈值越大,该层的剪枝率越大。
前向过程:

优化目标:

Manifold 动态剪枝
传统的动态剪枝虽然考虑了输入的差异来选择不同的子网,但只利用了 input 本身的信息,还有其他维度的信息可以进一步挖掘,例如:简单的样本分配简单的子网(复杂度对齐);相似的样本分配相似的子网(相似度对齐)。
manifold 假说:input samples 到其对应子网的映射函数,在高维空间下应是平滑的,即 input samples 之间的关系,在对应的子网上也依然要保持。(复杂度空间,相似度空间)
多维信息可以有效地 regularize 解空间中的 instance-subnetwork pairs ,其实就是说 Manifold 动态剪枝 可以更好地学习一个 instance-subnetwork 的映射函数,从而更好地为每个 instance 分配对应的子网。
Instance Complexity 样本复杂度
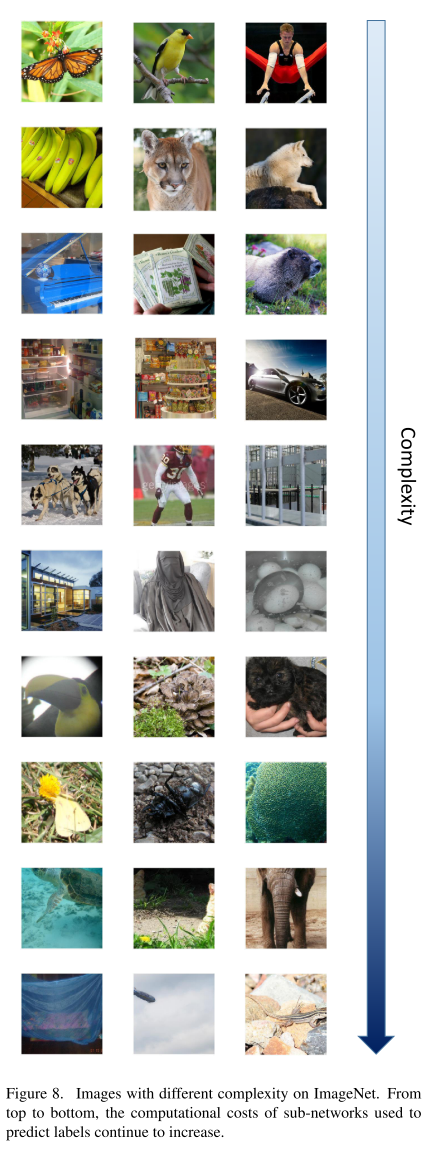
intuition:不同难度的样本预测难度是不同的,困难的样本(小目标,背景混乱等)需要更大的 model capacity,更强的 model representation ability,来更有效地提取信息。
这个 intuition 说明了样本之间还存在一个一维的 complexity space,可以利用该空间的信息帮助学习一个更好的 instance-subnetwork 映射函数。
首先用 metric 来衡量 instances 和 sub-networks 的复杂度,然后用自适应的函数来对齐实例之间和子网之间的复杂度关系。
- instances复杂度:用 Loss 来衡量当前输入实例的复杂度,Loss小说明当前实例简单,Loss大说明实例复杂
- subnetwork复杂度:用通道显著性vector \(\pi^{l}({x}_{i})\) 来衡量子网的复杂度,根据公式(3), \(\pi^{l}({x}_{i})\) 的稀疏性是由系数 \(\lambda\) 来控制的,更大的 \(\lambda\) 会诱导更强的稀疏性。
因此,当某个实例的 Loss 下降时,对应的稀疏惩罚系数 \(\lambda\) 要提高,反之亦然。极端情况下,当一个样本 Loss 很大时(over complex),对应的稀疏惩罚系数 \(\lambda=0\)
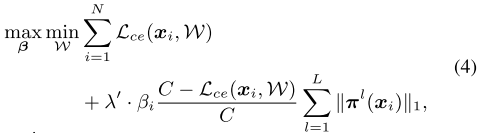
\(\lambda'\) 是超参,对所有实例共享; \(C\) 是预先定义的阈值,如果某个实例的 Loss > C,则认为该实例 over complex,稀疏惩罚项 \(\beta_i=0\) ,否则 \(\beta_i=1\) :
记  ,其中 \(\lambda(x_i)\) 范围为 \([0, \lambda']\)
,其中 \(\lambda(x_i)\) 范围为 \([0, \lambda']\)
公式(4)重写为:
Instance Similarity 样本相似度
intuition:除了复杂度空间,实例之间的相似度也是重要的信息,可以帮助学习一个更好的(instance-subnetwork)映射函数。例如:样本相似,对应分配的子网也要相似。
首先用 metric 来衡量样本相似度,要么用原始图片,要么用中间特征。作者认为中间特征是不同样本更有效的表示(高层的语义信息,在更高维度上的相似度)。
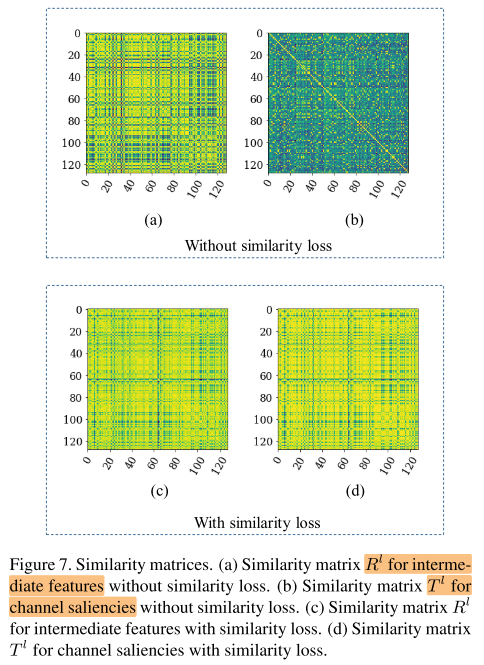
子网的结构可以用每一层的通道显著性 \(\pi^{l}({x}_{i})\) 来编码,通道显著性 \(\pi^{l}({x}_{i})\) 和中间特征都是layer-wise的,因此作者去计算每一层 \(\pi^{l}({x}_{i})\) 相似矩阵 \(T^{l} \in \mathbb{R}^{N \times N}\) 和 中间特征 的相似矩阵 \(R^{l} \in \mathbb{R}^{N \times N}\) :

 ,其中 \(p(\cdot)\) 表示平均池化操作
,其中 \(p(\cdot)\) 表示平均池化操作
添加相似度Loss: ,其中 \(\operatorname{dis}\left(T^{l}, R^{l}\right)=\left\|T^{l}-R^{l}\right\|_{F}\) ,
,其中 \(\operatorname{dis}\left(T^{l}, R^{l}\right)=\left\|T^{l}-R^{l}\right\|_{F}\) ,
总Loss变为: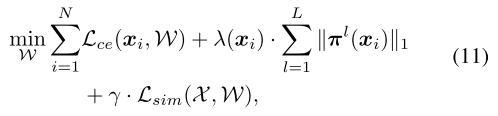 ,其中 \(\gamma\) 是超参
,其中 \(\gamma\) 是超参
设置 layer-wise 剪枝率
通道显著性vector \(\pi^l\) 再过一个阈值 \(\xi^{l}\) (大于阈值的取1,否则取0),得到该层输出通道的稀疏mask:\(\hat{\boldsymbol{\pi}}^{l}\left(\boldsymbol{x}_{i}\right)=\mathcal{I}\left(\boldsymbol{\pi}^{l}\left(\boldsymbol{x}_{i}\right), \xi^{l}\right)\)
这里的阈值 \(\xi^{l}\) 需要 layer-by-layer 地设置,进而决定 layer-wise 的剪枝率,某一层的阈值越大,该层的剪枝率越大。
本文的方法是需要手工设置每一层的阈值 \(\xi^{l}\) 的,而我们一般有的是 layer-wise 剪枝率(本文 layer-wise 剪枝率 follow 之前的动态剪枝工作 FBS),那么如何通过 layer-wise 剪枝率计算 \(\xi^{l}\) ?
以第 \(l\) 层为例,取N个样本,计算第 \(l\) 层的 \(c^l\) 个通道的平均通道显著性,并排序: \(\overline{\boldsymbol{\pi}}^{l}[1] \leq \overline{\boldsymbol{\pi}}^{l}[2] \leq \cdots \leq \overline{\boldsymbol{\pi}}^{l}\left[c^{l}\right]\) ,则阈值 \(\xi^{l}\) 设置为第 \(\lceil\eta c^{l}\rceil\) 个 \(\overline{\boldsymbol{\pi}}^{l}[\cdot]\) ,即 \(\xi^{l}=\boldsymbol{\pi}^{l}\left[\left\lceil\eta c^{l}\right\rceil\right]\)
推理时,只有大于阈值的通道才会被计算,其余的会被跳过,从而减少计算量。
Experiments
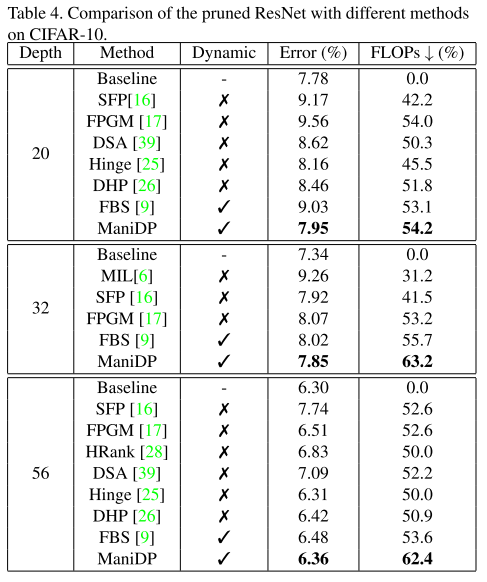
CIFAR10
由于每张图片的FLOPs都是不同的,表格里报告的是整个数据集每张图片的平均FLOPs剪枝率
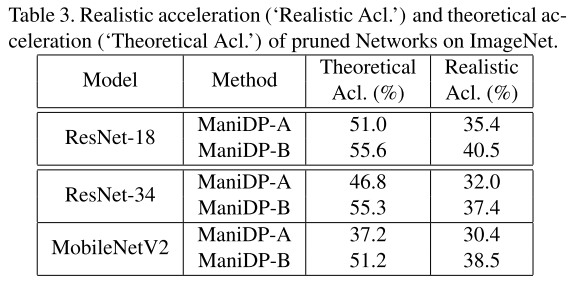
ImageNet
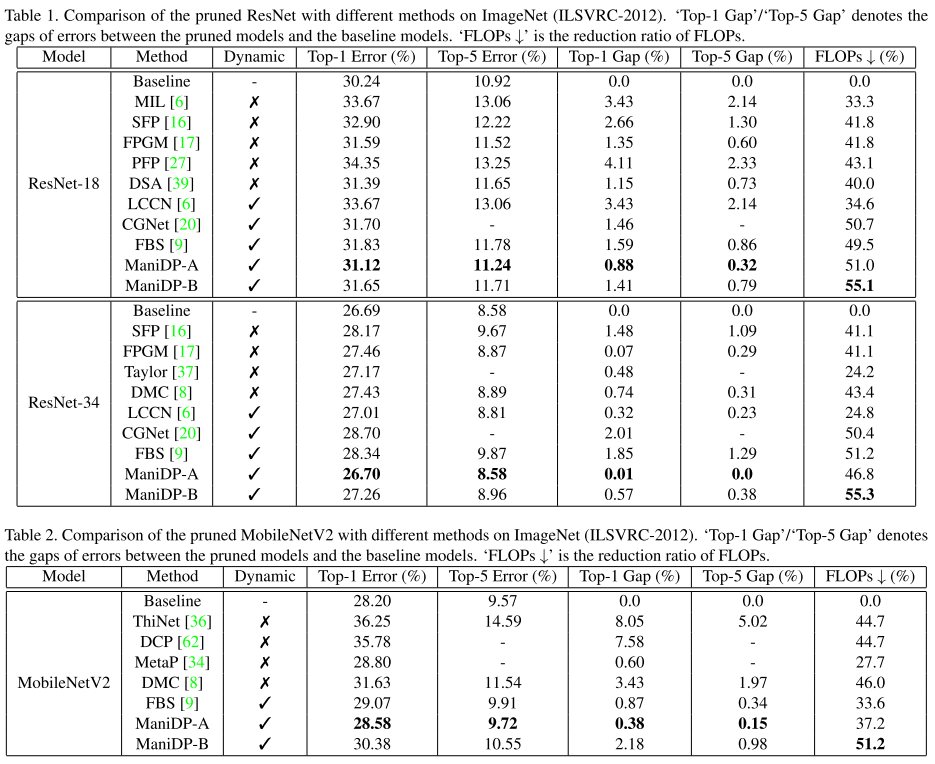
理论加速比(FLOPs)与实际加速比(实际推理时间)
同理,报告的是所有图片的平均实际推理时间
Ablation Study
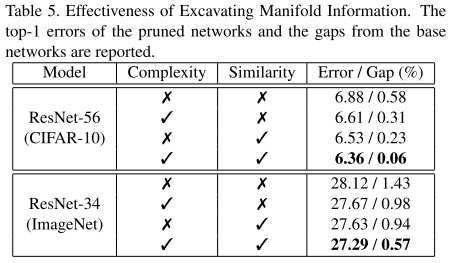
复杂度/相似度Loss的有效性
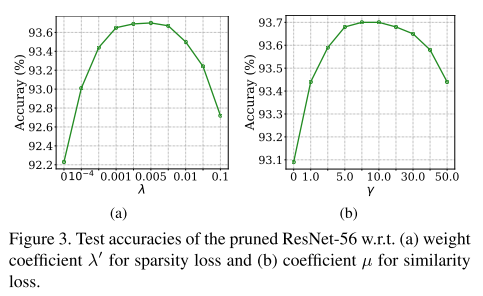
超参 \(\lambda'\) 和 \(\gamma\)
记
总Loss变为:
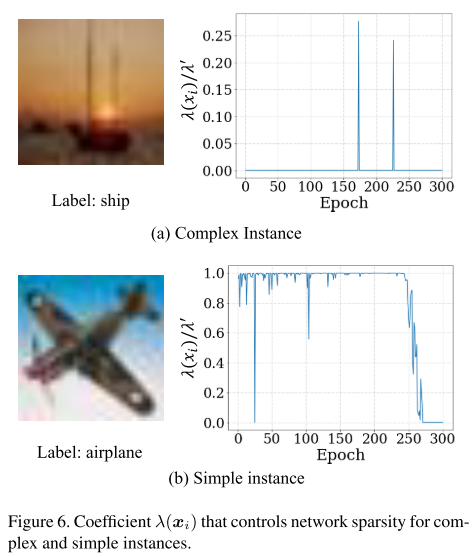
可视化
Conclusion
Summary
pros:
- 把动态网络的方法,从动态剪枝的角度来解释
- 用平均 FLOPs 的方式来和静态剪枝方法做对比,在之前动态网络的方法中比较少见
- 逻辑清晰,实验丰富(小数据集,大数据集,实际加速比,模块有效性,超参,可视化)
cons:
- 剪完的模型的加速比(FLOPs)只对当前数据集有参考价值,换个数据集估计加速比就不同了
- 泛化能力,超参的选择(样本复杂度/相似度的学习)结果都十分依赖当前的数据集,换个数据集可能要重新搜索,可能会影响泛化能力
To Read
Reference
https://www.zhihu.com/question/446299297/answer/1755955558

 浙公网安备 33010602011771号
浙公网安备 33010602011771号