【DARTS】2019-ICLR-DARTS: Differentiable Architecture Search-论文阅读
DARTS
2019-ICLR-DARTS Differentiable Architecture Search
来源:ChenBong 博客园
- Institute:CMU、Google
- Author:Hanxiao Liu、Karen Simonyan、Yiming Yang
- GitHub:2.8k stars
- https://github.com/quark0/darts
- https://github.com/khanrc/pt.darts
- Citation:557
问题
&& 更新结构参数α时, 有用到指数移动平均EMA吗?
没有
&& op的padding操作, 是先padding再卷积, 还是先卷积再padding?
先padding再卷积
&& FactorizedReduce() 函数的作用?
将feature map缩小为原来的一半
&& Reduction Cell的哪个Node的Stride=2? Reduction Cell中Node的具体输入输出?
不是reduction cell中的node 的stride=2,而是reduction cell的预处理的stride=2,具体见离散网络结构 部分
&& Cell_3 Node_0 的size预处理是什么?
# 如果[k-1] cell 是reduction cell, 当前cell的input size=[k-1] cell 的 output size, 因此不匹配[k-2] cell 的 output size # 因此[k-2] cell 的output需要 reduce 处理 if reduction_p: # 如果[k-1] cell 是reduction cell: 将feature map缩小为原来的一半 # input node_0: 处理[k-2]cell的output self.preproc0 = ops.FactorizedReduce(channels_pp, channels, affine=False) else: # 如果[k-1] cell 不是reduction cell: 标准1x1卷积 # input node_0: 处理[k-2]cell的output self.preproc0 = ops.StdConv(channels_pp, channels, 1, 1, 0, affine=False)
&& α/w的更新, 是以batch为单位还是epochs为单位?
以batch为单位
&& 更新α用的优化器是什么? 具体参数? 具体操作?
self.ctrl_optim = torch.optim.Adam(self.mutator.parameters(), arc_learning_rate, betas=(0.5, 0.999),weight_decay=1.0E-3)
&& 实际上权重的更新时怎么做的? 只更新一步吗?
一阶近似时,更新一次;
二阶近似时,
&& 用val set 更新α, 用train set 更新w, 数据集划分?
val set 为 cifar10 的 test set
Introduction
Motivation
之前的NAS方法:
- 高昂的计算代价:2000/3000 GPU days
- 离散的搜索空间,导致大量的结构需要评估
Contribution
- 基于梯度下降的可微分方法
- 可以用在CNN和RNN上
- 在CIFAR-10和PTB数据集上达到SOTA
- 高效性:2000 GPU days vs 4 GPU days
- 可迁移性:在cifar10上搜索的结构迁移到ImageNet上,在PTB上搜索的结构迁移到WikiText-2上
Method
搜索空间
搜索cell结构作为最终网络结构的构建块(building block)
搜素到的cell可以堆叠构成CNN或者RNN
一个cell是一个包含N个节点的有向无环图(DAG)
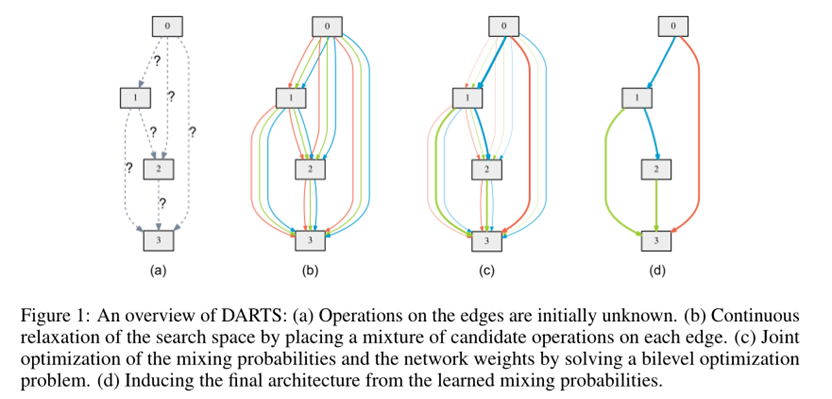
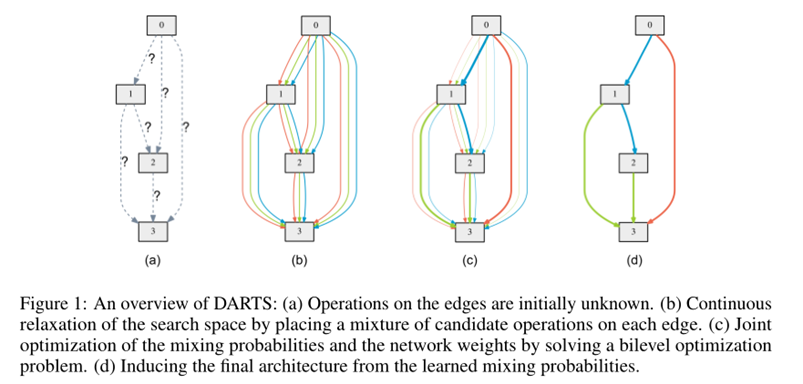
图1说明:
图1表示一个cell结构;每个节点都会连接到比自身编号小的节点上;
节点 i 表示feature maps(\(x^{(i)}\)),节点之间不同颜色的箭头表示不同op,每个op都有自己的权重;
节点之间的操作选自op集O, 两个节点之间的op数=|O|;
节点 i, j 之间的每个op都对应一个结构参数(\(α^{(i, j)}\))(可以理解为该op的强度/权重等),\(α^{(i,j)}\) 是一个|O|维的向量;
\(x^{(j)}=\sum_{i<j} o^{(i, j)}\left(x^{(i)}\right) \qquad (1)\)
公式(1)说明:
- \(x^{(i)}\) 表示第i个节点的feature map
- \(o^{(i, j)}\) 是一组op集合
- \(o^{(i, j)}\left(x^{(i)}\right)\) 表示对feature map \(x^{(i)}\) 执行op集 \(o^{(i, j)}\) 得到新的feature map
- 对所有小于j的节点i,都执行 \(o^{(i, j)}\left(x^{(i)}\right)\) ,并将结果求和,得到 j 节点的feature map
\(\bar{o}^{(i, j)}(x)=\sum_{o \in \mathcal{O}} \frac{\exp \left(\alpha_{o}^{(i, j)}\right)}{\sum_{o^{\prime} \in \mathcal{O}} \exp \left(\alpha_{o^{\prime}}^{(i, j)}\right)} o(x) \qquad (2)\)
公式(2)说明:
- 向量 \(α^{ij}\) 的维度是|O|
- 对 \(α^{(i, j)}\) 执行softmax,得到softmax后的结构参数 \(\hat{α}^{(i, j)}=\frac{\exp \left(\alpha_{o}^{(i, j)}\right)}{\sum_{o^{\prime} \in \mathcal{O}} \exp \left(\alpha_{o^{\prime}}^{(i, j)}\right)}\)
- 将op集合O中的每个op都施加在x上,并乘以对应的结构参数 \(\hat{α}^{(i, j)}\) ,再求和,得到 \(\bar{o}^{(i, j)}(x)\)
- 则mix op 记为 \(\bar{o}^{(i, j)}(·)\)
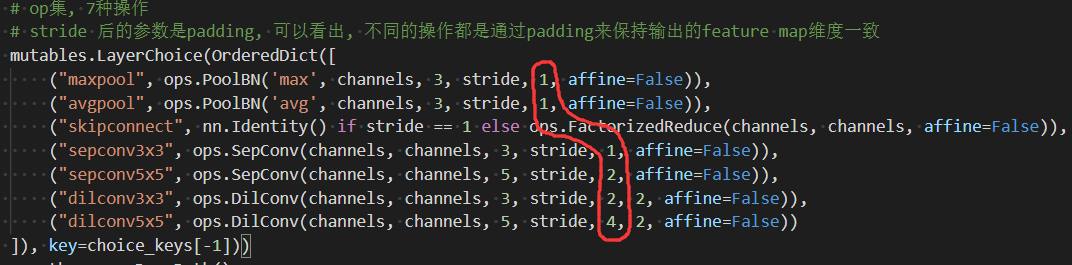
&& 两个node之间, 不同颜色的op的output feature map size 不一样怎么办?
两个node之间, input size相同, 由于op类型不同, 会导致不同op输出的output size不同, 代码中是通过padding来保持不同op的output feature map维度统一的
&& 两个node之间, 不同颜色的op的output feature maps 是如何整合的? 求和还是concat?
不同op的的output feature maps (通道数和size都相同) 会进行求和 (对应位置元素相加), 因此多个op的output feature maps 整合后, feature map的通道数和size都不变
&& 来自不同node的 output feature maps 如何整合?求和还是concat?
求和
\(o^{(i, j)}=\operatorname{argmax}_{o \in \mathcal{O}} \alpha_{o}^{(i, j)}\)
公式说明:
在搜索的最后阶段三条不同颜色的线会保留对应结构参数 \(α^{(i, j)}\) 最大的那一条
结构图例说明
**CNN cell结构: **
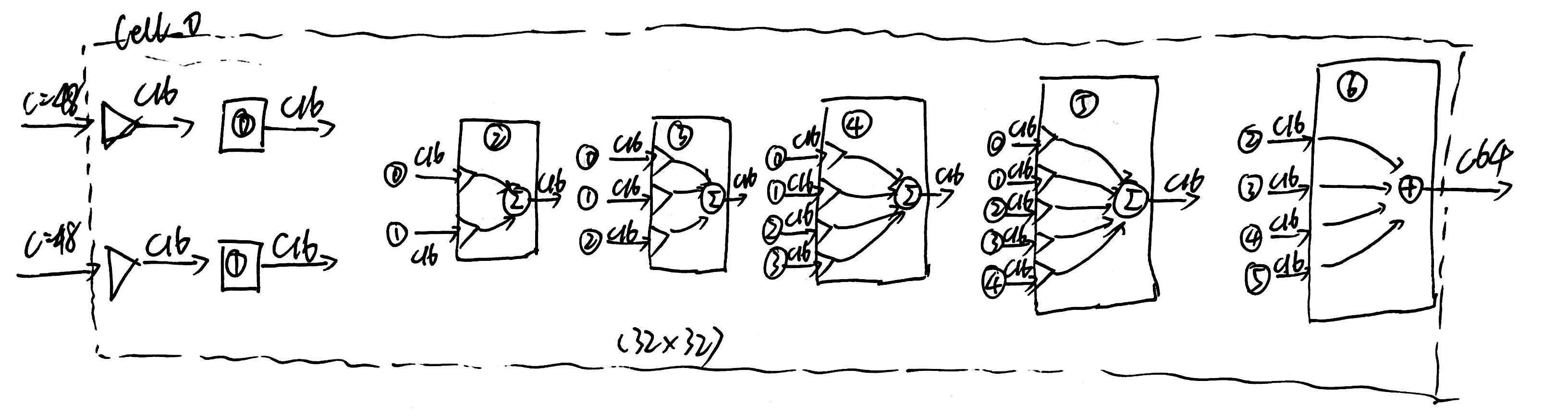
其中每个三角形代表图1中两个node之间的一组操作, 即每个三角形表示公式(2)的操作: \(\bar{o}^{(i, j)}(x)=\sum_{o \in \mathcal{O}} \frac{\exp \left(\alpha_{o}^{(i, j)}\right)}{\sum_{o^{\prime} \in \mathcal{O}} \exp \left(\alpha_{o^{\prime}}^{(i, j)}\right)} o(x) \qquad (2)\) , 到最后, 图1中的每组线会只保留一个op, 即每个三角形到最后也只保留1个强度最大的op. 而且每个node会选择n个op中强度最大的2个.
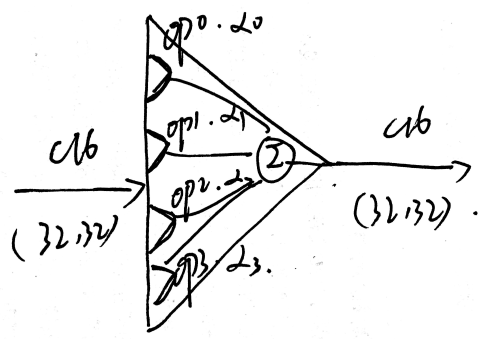
最后每个三角形(对应图1中两个node之间的一组操作)
CNN结构:

一个三角形表示图1中两个node之间的一组op:
\(\bar{o}^{(i, j)}(x)=\sum_{o \in \mathcal{O}} \frac{\exp \left(\alpha_{o}^{(i, j)}\right)}{\sum_{o^{\prime} \in \mathcal{O}} \exp \left(\alpha_{o^{\prime}}^{(i, j)}\right)} o(x) \qquad (2)\)
优化目标
我们的目标是联合学习结构参数(α)和网络权重(w):
\(\min _{\alpha} \mathcal{L}_{v a l}\left(w^{*}(\alpha), \alpha\right) \qquad (3)\)
s.t. \(\quad w^{*}(\alpha)=\operatorname{argmin}_{w} \mathcal{L}_{\text {train}}(w, \alpha) \qquad (4)\)
公式(3)(4)说明:
- \(w^{*}(\alpha)\) 是结构参数取值为 \(α\) 时最佳的网络权重,即不同的 \(α\) 对应不同的最佳网络权重 \(w^{*}(\alpha)\)
- 训练流程:
- 每次改变 \(α\) ,先将网络权重训练到对应的最佳网络权重 \(w^{*}(\alpha)\) ,——公式(4)
- 对结构参数 \(α\) 梯度下降,尝试不同的结构参数 \(α\) ,找到使得loss最小的结构参数 \(α\),即找到了最佳的结构——公式(3)
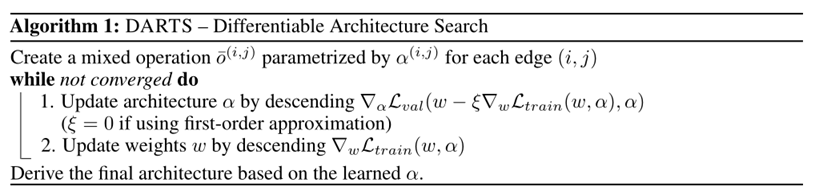
算法(1)DARTS-可微分的结构搜索 说明:
- 根据结构参数 \(α^{(i, j)}\) 构建mix op \(\bar{o}^{(i, j)}(·)\)
- 若(还未收敛),执行:
- 梯度下降更新结构参数 \(α\) : \(\nabla_{\alpha} \mathcal{L}_{v a l}\left(w-\xi \nabla_{w} \mathcal{L}_{t r a i n}(w, \alpha), \alpha\right)\)
- 梯度下降更新网络权重 w: \(\nabla_{w} \mathcal{L}_{t r a i n}(w, \alpha)\)
- 根据收敛后的 \(α\) 导出最终结构
近似处理
每次更新 \(α\) 后,如果重新训练网络权重到收敛,需要消耗大量时间,我们希望通过简化公式(3),只更新一次,来近似逼近 \(w^{*}(\alpha)\) ,而不是通过训练到收敛来获得 \(w^{*}(\alpha)\)
\(\nabla_{\alpha} \mathcal{L}_{v a l}\left(w^{*}(\alpha), \alpha\right) \qquad (5)\)
\((5)\approx \nabla_{\alpha} \mathcal{L}_{v a l}\left(w-\xi \nabla_{w} \mathcal{L}_{t r a i n}(w, \alpha), \alpha\right) \qquad(6)\)
公式(6) 说明:
\(\xi\) 是一个超参, 代表权重一步优化的学习率, 在结构参数 \(α\) 更新后, 该公式通过只更新一步网络权重(本来要更新到收敛), 来近似收敛后的网络权重. 注意到如果w已经是最优时, 即 \(\nabla_{w} \mathcal{L}_{\text {train}}(w, \alpha)=0\) 时, (6)将退化为 \(\nabla_{\alpha} \mathcal{L}_{v a l}(w, \alpha)\)
\((6)=\nabla_{\alpha} \mathcal{L}_{v a l}\left(w^{\prime}, \alpha\right)-\xi \nabla_{\alpha, w}^{2} \mathcal{L}_{t r a i n}(w, \alpha) \nabla_{w^{\prime}} \mathcal{L}_{v a l}\left(w^{\prime}, \alpha\right) \qquad (7)\)
(7)式中的 \(w^{\prime}=w-\xi \nabla_{w} L_{t r a i n}(w, \alpha)\)
公式(7)说明:
式(6)应用链式法则, 可得式(7)
&& (7)式后面包含了一个计算复杂度很高的矩阵乘法 $\xi \nabla_{\alpha, w}^{2} \mathcal{L}{t r a i n}(w, \alpha) \nabla{w^{\prime}} \mathcal{L}_{v a l}\left(w^{\prime}, \alpha\right) $ ,文中提出有限差分近似的方法解决, 如下.
设 \(w^{\pm}=w \pm \epsilon \nabla_{w^{\prime}} \mathcal{L}_{v a l}\left(w^{\prime}, \alpha\right)\) 则:
\(\nabla_{\alpha, w}^{2} \mathcal{L}_{t r a i n}(w, \alpha) \nabla_{w^{\prime}} \mathcal{L}_{v a l}\left(w^{\prime}, \alpha\right) \approx \frac{\nabla_{\alpha} \mathcal{L}_{t r a i n}\left(w^{+}, \alpha\right)-\nabla_{\alpha} \mathcal{L}_{t r a i n}\left(w^{-}, \alpha\right)}{2 \epsilon} \qquad (8)\)
公式(8)说明:
&& 评估该 有限差分 仅需要两次前向传播即可得到 weights,两次反向传播,就可以得到 α,运算复杂度大大的降低了: \(O(|\alpha||w|)\) to \(O(|\alpha|+|w|)\)
理论上 \(\epsilon\) 要足够小, 经验上取 \(\epsilon=0.01 /\left\|\nabla_{w^{\prime}} \mathcal{L}_{v a l}\left(w^{\prime}, \alpha\right)\right\|_{2}\) 即可足够精确.
\(\xi\) 取值讨论:
- 当 \(\xi = 0\) , 式(7)中的二阶导数将消失, 因此
- 设 \(\xi = 0\) , 此时为一阶近似
- 设 \(\xi > 0\) , 此时为二阶近似, 这种情况下, 简单的策略是将 \(\xi\) 设置为网络权重w的学习率
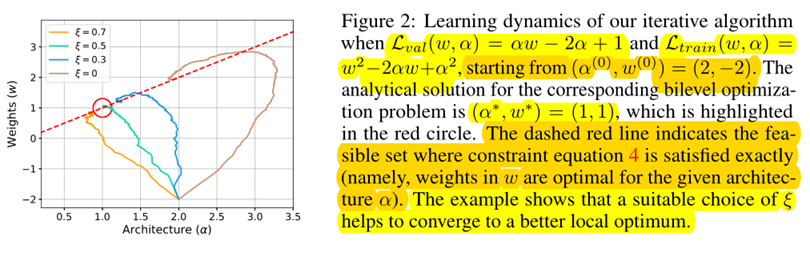
\(\xi\) 取值实验:
设置简单的损失函数:
- \(\mathcal{L}_{\text {val}}(w, \alpha)=\alpha w-2 \alpha+1\)
- \(\mathcal{L}_{\text {train}}(w, \alpha)=w^2-2\alpha w+ \alpha^2\)
\(\xi\) 取不同的值, 优化过程如下图:

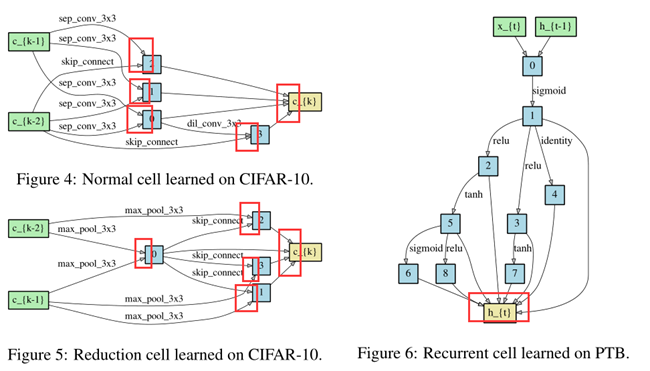
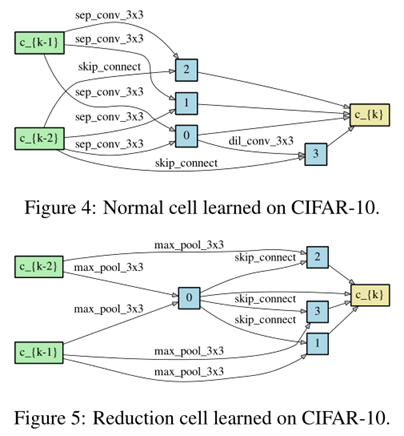
连续结构=>离散结构
为了构造离散的结构的cell中的每个节点(即边上不存在结构参数 或者说 结构参数均为1),对于每个节点,我们都保留op强度最强的k个边,对于CNN来说k=2,对于RNN来说k=1。
即下图中,CNN cell 的每个node 都有k=2个输入,RNN cell 的每个node 都有k=1个输入。
&& 代码中如何实现?
&& 堆叠cell以后, 多个cell是否是相同的? 如何实现?
op强度定义为: \(\frac{\exp \left(\alpha_{o}^{(i, j)}\right)}{\sum_{o^{\prime} \in \mathcal{O}} \exp \left(\alpha_{o^{\prime}}^{(i, j)}\right)}\)
Experiments
以下是op集 O 中的op:
- 3 × 3 and 5 × 5 separable convolutions,
- 3 × 3 and 5 × 5 dilated separable convolutions,
- 3 × 3 max pooling,
- 3 × 3 average pooling,
- identity (skip connection?)
- zero.
所有的op:
- stride = 1(如有需要的话)
- 不同操作的feature map(分辨率可能不同)都进行pad以保持相同的分辨率
我们使用:
- 对于卷积操作,使用 ReLU-Conv-BN的顺序
- 每个可分离卷积都应用两次
- CNN cell包含N=7个Nodes,output node定义为所有中间节点(feature maps)的concat
&& concat维度不同如何处理?
每个cell包含2个input node,和1个output node
- 第k个cell 的 2个input node 分别等于 第k-2个cell 和 第 k-1 个cell的output node
- 位于网络深度 1/3 和 2/3 的2个cell,设置为reduction cell,即cell中的op 的stride=2
- 因此有2种不用的cell,分别称为Normal cell 和 Reduce cell,两种cell的结构参数不同,分别称为 \(α_{normal}, α_{reduce}\)
- 其中 \(α_{normal}\) 在所有 Normal cell 中共享,\(α_{reduce}\) 在所有 Reduce cell 中共享
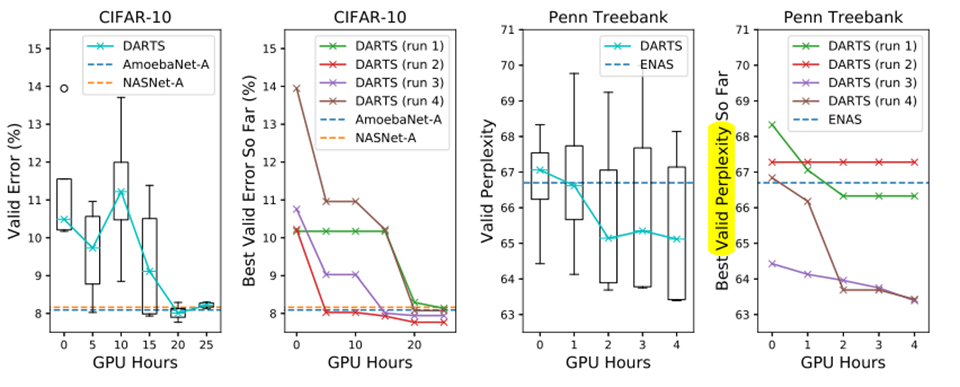
- 为了确定最终的结构,我们用不同的 random seeds运行DARTS 4次,并将4次的结果train from scratch 少量epochs(100 epochs for CIFAR-10,300 epochs for PTB),根据训练少量epochs后的性能来挑选最佳cell
- 由于cell要进行多次堆叠,因此运行多次搜索是必要的,而且结果可能是初始值敏感的,如下图2,4:
结构评估
为了评估搜索到的结构,我们随机初始化结构的权重(在搜索过程中学习的权重被抛弃),train from scratch,并报告了其在测试集上的权重。
结果分析
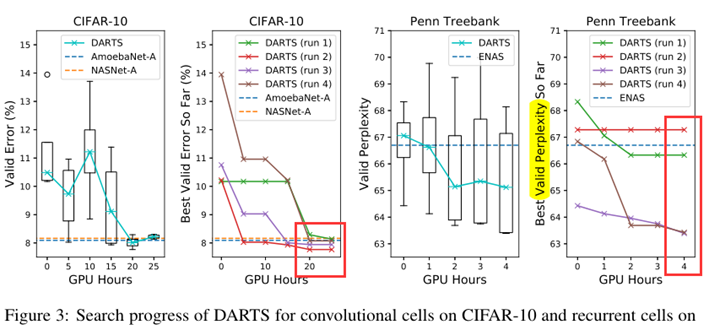
图3说明:
- DARTS在减少3个数量级的计算量的基础上达到了与SOTA相当的结果
- (i.e. 1.5 or 4 GPU days vs 2000 GPU days for NASNet and 3150 GPU days for AmoebaNet)
- 较长的搜索时间是由于我们对cell 的选择重复搜索了4次,这种做法对CNN cell 来说不是特别重要,CNN cell 的初值敏感性较不明显,RNN cell 的初值敏感性较大
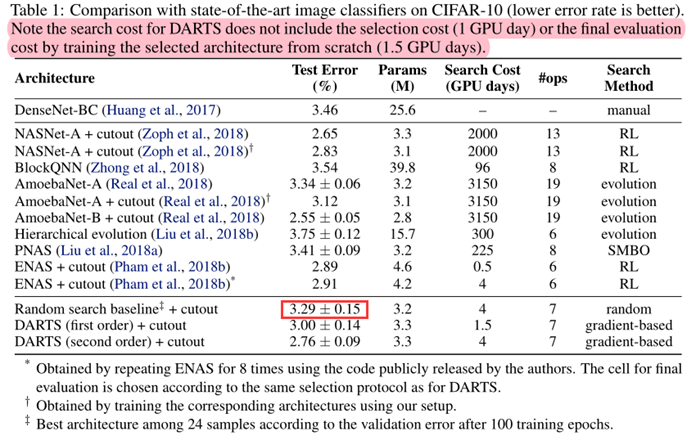
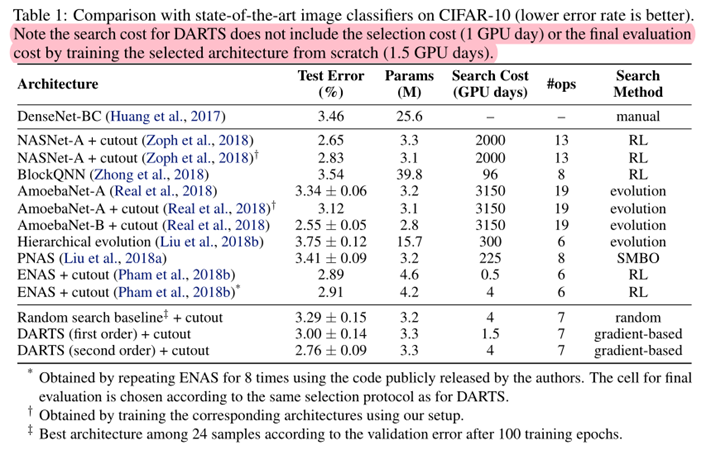
表1说明:
- 从表1可以看出,随机搜索的结果也具有竞争力,说明本方法搜索空间设计的较好。
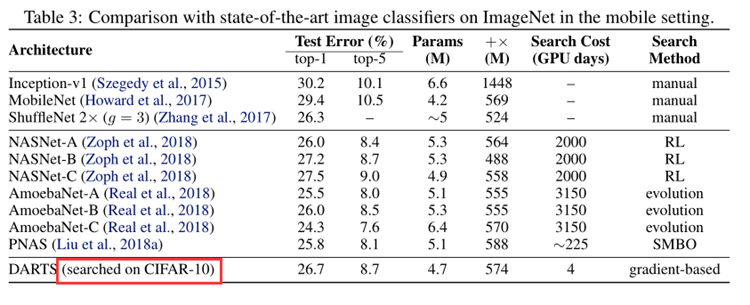
表3说明:
- 在cifar10上搜索的cell,确实可以被迁移到ImageNet上。
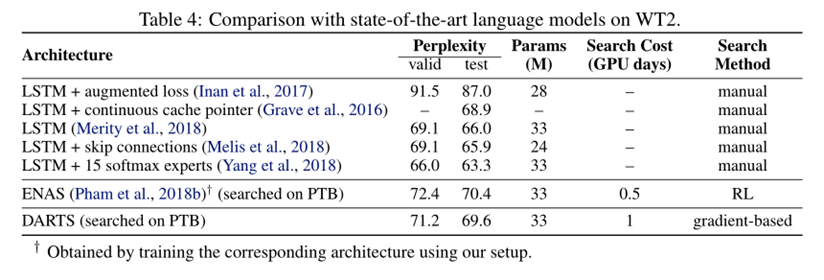
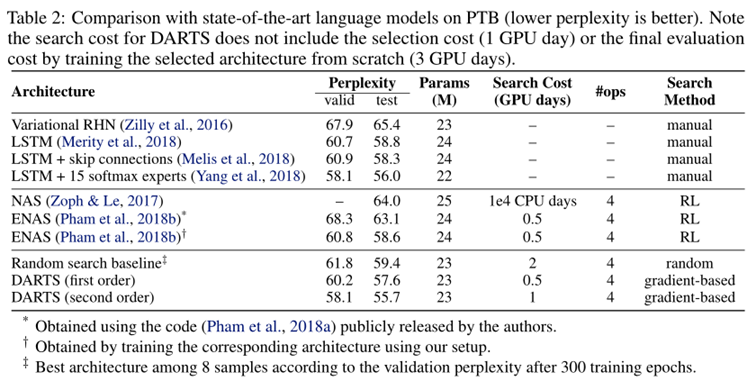
表4说明:
- 表4中可看出,PTB与WT2之间的可迁移性较弱(与CIFAR-10和ImageNet的可迁移性相比),原因是用于搜索结构的源数据集(PTB)规模较小
- 可以直接对感兴趣的数据集进行结构搜索,可以避免迁移性的问题
搜索过程中网络输入输出的变化
CNN:==================================================================
CNN In: torch.Size([32, 3, 32, 32])
CNN stem In : torch.Size([32, 3, 32, 32])
CNN stem Out: torch.Size([32, 48, 32, 32]), torch.Size([32, 48, 32, 32])
Cell_0:========================
Cell_0 In: torch.Size([32, 48, 32, 32]) torch.Size([32, 48, 32, 32])
Preproc0_in: torch.Size([32, 48, 32, 32]), Preproc1_in: torch.Size([32, 48, 32, 32])
Preproc0_out: torch.Size([32, 16, 32, 32]), Preproc1_out: torch.Size([32, 16, 32, 32])
Node_0 In: 1 x torch.Size([32, 16, 32, 32])
Node_0 Out: 1 x torch.Size([32, 16, 32, 32])
Node_1 In: 1 x torch.Size([32, 16, 32, 32])
Node_1 Out: 1 x torch.Size([32, 16, 32, 32])
Node_2 In:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node pre_Out:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node_2 Out: 1 x torch.Size([32, 16, 32, 32])
Node_3 In:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node pre_Out:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node_3 Out: 1 x torch.Size([32, 16, 32, 32])
Node_4 In:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node pre_Out:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node_4 Out: 1 x torch.Size([32, 16, 32, 32])
Node_5 In:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node pre_Out:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node_5 Out: 1 x torch.Size([32, 16, 32, 32])
Cell_0 Out: torch.Size([32, 64, 32, 32])
Cell_1:========================
Cell_1 In: torch.Size([32, 48, 32, 32]) torch.Size([32, 64, 32, 32])
Preproc0_in: torch.Size([32, 48, 32, 32]), Preproc1_in: torch.Size([32, 64, 32, 32])
Preproc0_out: torch.Size([32, 16, 32, 32]), Preproc1_out: torch.Size([32, 16, 32, 32])
Node_0 In: 1 x torch.Size([32, 16, 32, 32])
Node_0 Out: 1 x torch.Size([32, 16, 32, 32])
Node_1 In: 1 x torch.Size([32, 16, 32, 32])
Node_1 Out: 1 x torch.Size([32, 16, 32, 32])
Node_2 In:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node pre_Out:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node_2 Out: 1 x torch.Size([32, 16, 32, 32])
Node_3 In:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node pre_Out:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node_3 Out: 1 x torch.Size([32, 16, 32, 32])
Node_4 In:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node pre_Out:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node_4 Out: 1 x torch.Size([32, 16, 32, 32])
Node_5 In:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node pre_Out:
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
torch.Size([32, 16, 32, 32])
Node_5 Out: 1 x torch.Size([32, 16, 32, 32])
Cell_1 Out: torch.Size([32, 64, 32, 32])
Cell_2:========================
Cell_2 In: torch.Size([32, 64, 32, 32]) torch.Size([32, 64, 32, 32])
Preproc0_in: torch.Size([32, 64, 32, 32]), Preproc1_in: torch.Size([32, 64, 32, 32])
Preproc0_out: torch.Size([32, 32, 32, 32]), Preproc1_out: torch.Size([32, 32, 32, 32])
Node_0 In: 1 x torch.Size([32, 32, 32, 32])
Node_0 Out: 1 x torch.Size([32, 32, 32, 32])
Node_1 In: 1 x torch.Size([32, 32, 32, 32])
Node_1 Out: 1 x torch.Size([32, 32, 32, 32])
Node_2 In:
torch.Size([32, 32, 32, 32])
torch.Size([32, 32, 32, 32])
Node pre_Out:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node_2 Out: 1 x torch.Size([32, 32, 16, 16])
Node_3 In:
torch.Size([32, 32, 32, 32])
torch.Size([32, 32, 32, 32])
torch.Size([32, 32, 16, 16])
Node pre_Out:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node_3 Out: 1 x torch.Size([32, 32, 16, 16])
Node_4 In:
torch.Size([32, 32, 32, 32])
torch.Size([32, 32, 32, 32])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node pre_Out:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node_4 Out: 1 x torch.Size([32, 32, 16, 16])
Node_5 In:
torch.Size([32, 32, 32, 32])
torch.Size([32, 32, 32, 32])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node pre_Out:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node_5 Out: 1 x torch.Size([32, 32, 16, 16])
Cell_2 Out: torch.Size([32, 128, 16, 16])
Cell_3:========================
Cell_3 In: torch.Size([32, 64, 32, 32]) torch.Size([32, 128, 16, 16])
Preproc0_in: torch.Size([32, 64, 32, 32]), Preproc1_in: torch.Size([32, 128, 16, 16])
Preproc0_out: torch.Size([32, 32, 16, 16]), Preproc1_out: torch.Size([32, 32, 16, 16])
Node_0 In: 1 x torch.Size([32, 32, 16, 16])
Node_0 Out: 1 x torch.Size([32, 32, 16, 16])
Node_1 In: 1 x torch.Size([32, 32, 16, 16])
Node_1 Out: 1 x torch.Size([32, 32, 16, 16])
Node_2 In:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node pre_Out:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node_2 Out: 1 x torch.Size([32, 32, 16, 16])
Node_3 In:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node pre_Out:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node_3 Out: 1 x torch.Size([32, 32, 16, 16])
Node_4 In:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node pre_Out:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node_4 Out: 1 x torch.Size([32, 32, 16, 16])
Node_5 In:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node pre_Out:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node_5 Out: 1 x torch.Size([32, 32, 16, 16])
Cell_3 Out: torch.Size([32, 128, 16, 16])
Cell_4:========================
Cell_4 In: torch.Size([32, 128, 16, 16]) torch.Size([32, 128, 16, 16])
Preproc0_in: torch.Size([32, 128, 16, 16]), Preproc1_in: torch.Size([32, 128, 16, 16])
Preproc0_out: torch.Size([32, 32, 16, 16]), Preproc1_out: torch.Size([32, 32, 16, 16])
Node_0 In: 1 x torch.Size([32, 32, 16, 16])
Node_0 Out: 1 x torch.Size([32, 32, 16, 16])
Node_1 In: 1 x torch.Size([32, 32, 16, 16])
Node_1 Out: 1 x torch.Size([32, 32, 16, 16])
Node_2 In:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node pre_Out:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node_2 Out: 1 x torch.Size([32, 32, 16, 16])
Node_3 In:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node pre_Out:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node_3 Out: 1 x torch.Size([32, 32, 16, 16])
Node_4 In:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node pre_Out:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node_4 Out: 1 x torch.Size([32, 32, 16, 16])
Node_5 In:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node pre_Out:
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
torch.Size([32, 32, 16, 16])
Node_5 Out: 1 x torch.Size([32, 32, 16, 16])
Cell_4 Out: torch.Size([32, 128, 16, 16])
Cell_5:========================
Cell_5 In: torch.Size([32, 128, 16, 16]) torch.Size([32, 128, 16, 16])
Preproc0_in: torch.Size([32, 128, 16, 16]), Preproc1_in: torch.Size([32, 128, 16, 16])
Preproc0_out: torch.Size([32, 64, 16, 16]), Preproc1_out: torch.Size([32, 64, 16, 16])
Node_0 In: 1 x torch.Size([32, 64, 16, 16])
Node_0 Out: 1 x torch.Size([32, 64, 16, 16])
Node_1 In: 1 x torch.Size([32, 64, 16, 16])
Node_1 Out: 1 x torch.Size([32, 64, 16, 16])
Node_2 In:
torch.Size([32, 64, 16, 16])
torch.Size([32, 64, 16, 16])
Node pre_Out:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node_2 Out: 1 x torch.Size([32, 64, 8, 8])
Node_3 In:
torch.Size([32, 64, 16, 16])
torch.Size([32, 64, 16, 16])
torch.Size([32, 64, 8, 8])
Node pre_Out:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node_3 Out: 1 x torch.Size([32, 64, 8, 8])
Node_4 In:
torch.Size([32, 64, 16, 16])
torch.Size([32, 64, 16, 16])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node pre_Out:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node_4 Out: 1 x torch.Size([32, 64, 8, 8])
Node_5 In:
torch.Size([32, 64, 16, 16])
torch.Size([32, 64, 16, 16])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node pre_Out:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node_5 Out: 1 x torch.Size([32, 64, 8, 8])
Cell_5 Out: torch.Size([32, 256, 8, 8])
Cell_6:========================
Cell_6 In: torch.Size([32, 128, 16, 16]) torch.Size([32, 256, 8, 8])
Preproc0_in: torch.Size([32, 128, 16, 16]), Preproc1_in: torch.Size([32, 256, 8, 8])
Preproc0_out: torch.Size([32, 64, 8, 8]), Preproc1_out: torch.Size([32, 64, 8, 8])
Node_0 In: 1 x torch.Size([32, 64, 8, 8])
Node_0 Out: 1 x torch.Size([32, 64, 8, 8])
Node_1 In: 1 x torch.Size([32, 64, 8, 8])
Node_1 Out: 1 x torch.Size([32, 64, 8, 8])
Node_2 In:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node pre_Out:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node_2 Out: 1 x torch.Size([32, 64, 8, 8])
Node_3 In:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node pre_Out:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node_3 Out: 1 x torch.Size([32, 64, 8, 8])
Node_4 In:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node pre_Out:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node_4 Out: 1 x torch.Size([32, 64, 8, 8])
Node_5 In:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node pre_Out:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node_5 Out: 1 x torch.Size([32, 64, 8, 8])
Cell_6 Out: torch.Size([32, 256, 8, 8])
Cell_7:========================
Cell_7 In: torch.Size([32, 256, 8, 8]) torch.Size([32, 256, 8, 8])
Preproc0_in: torch.Size([32, 256, 8, 8]), Preproc1_in: torch.Size([32, 256, 8, 8])
Preproc0_out: torch.Size([32, 64, 8, 8]), Preproc1_out: torch.Size([32, 64, 8, 8])
Node_0 In: 1 x torch.Size([32, 64, 8, 8])
Node_0 Out: 1 x torch.Size([32, 64, 8, 8])
Node_1 In: 1 x torch.Size([32, 64, 8, 8])
Node_1 Out: 1 x torch.Size([32, 64, 8, 8])
Node_2 In:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node pre_Out:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node_2 Out: 1 x torch.Size([32, 64, 8, 8])
Node_3 In:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node pre_Out:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node_3 Out: 1 x torch.Size([32, 64, 8, 8])
Node_4 In:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node pre_Out:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node_4 Out: 1 x torch.Size([32, 64, 8, 8])
Node_5 In:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node pre_Out:
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
torch.Size([32, 64, 8, 8])
Node_5 Out: 1 x torch.Size([32, 64, 8, 8])
Cell_7 Out: torch.Size([32, 256, 8, 8])
CNN Out: torch.Size([32, 10])
离散网络结构
每个Node取结构参数最大的2个操作,构造离散的网络结构
// epoch_49.json
{
"normal_n2_p0": "sepconv3x3",
"normal_n2_p1": "sepconv3x3",
"normal_n2_switch": [
"normal_n2_p0",
"normal_n2_p1"
],
"normal_n3_p0": "skipconnect",
"normal_n3_p1": "sepconv3x3",
"normal_n3_p2": [],
"normal_n3_switch": [
"normal_n3_p0",
"normal_n3_p1"
],
"normal_n4_p0": "sepconv3x3",
"normal_n4_p1": "skipconnect",
"normal_n4_p2": [],
"normal_n4_p3": [],
"normal_n4_switch": [
"normal_n4_p0",
"normal_n4_p1"
],
"normal_n5_p0": "skipconnect",
"normal_n5_p1": "skipconnect",
"normal_n5_p2": [],
"normal_n5_p3": [],
"normal_n5_p4": [],
"normal_n5_switch": [
"normal_n5_p0",
"normal_n5_p1"
],
"reduce_n2_p0": "maxpool",
"reduce_n2_p1": "avgpool",
"reduce_n2_switch": [
"reduce_n2_p0",
"reduce_n2_p1"
],
"reduce_n3_p0": "maxpool",
"reduce_n3_p1": [],
"reduce_n3_p2": "skipconnect",
"reduce_n3_switch": [
"reduce_n3_p0",
"reduce_n3_p2"
],
"reduce_n4_p0": [],
"reduce_n4_p1": [],
"reduce_n4_p2": "skipconnect",
"reduce_n4_p3": "skipconnect",
"reduce_n4_switch": [
"reduce_n4_p2",
"reduce_n4_p3"
],
"reduce_n5_p0": [],
"reduce_n5_p1": "avgpool",
"reduce_n5_p2": "skipconnect",
"reduce_n5_p3": [],
"reduce_n5_p4": [],
"reduce_n5_switch": [
"reduce_n5_p1",
"reduce_n5_p2"
]
}
Conclusion
-
提出了DARTS,一种简单高效的CNN和RNN 结构搜索算法,并达到了SOTA
-
较之前的方法的效率提高了几个数量级
未来改进:
- 连续结构编码与离散搜索之间的差异
- 基于参数共享的方法?
Summary
Reference
【论文笔记】DARTS: Differentiable Architecture Search
论文笔记:DARTS: Differentiable Architecture Search

 浙公网安备 33010602011771号
浙公网安备 33010602011771号