CNN
神经网络
这里的神经网络,也指人工神经网络(Artificial Neural Networks,简称ANNs),是一种模仿生物神经网络行为特征的算法数学模型,由神经元、节点与节点之间的连接(突触)所构成,如下图:
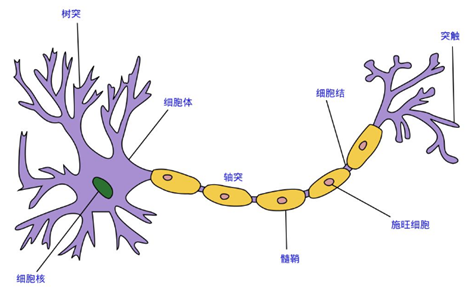
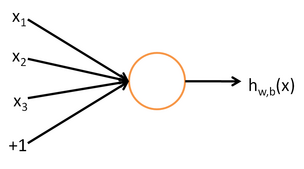
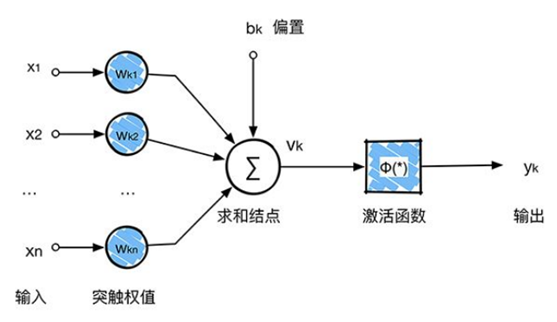
每个神经网络单元抽象出来的数学模型如下,也叫感知器,它接收多个输入(x1,x2,x3...),产生一个输出,这就好比是神经末梢感受各种外部环境的变化(外部刺激),然后产生电信号,以便于转导到神经细胞(又叫神经元)。
单个的感知器就构成了一个简单的模型,但在现实世界中,实际的决策模型则要复杂得多,往往是由多个感知器组成的多层网络,如下图所示,这也是经典的神经网络模型,由输入层、隐含层、输出层构成。
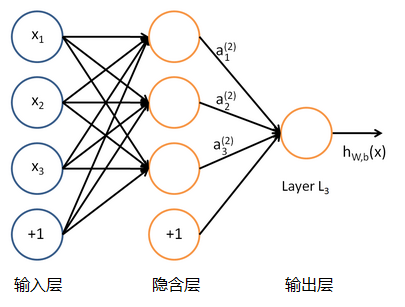
人工神经网络可以映射任意复杂的非线性关系,具有很强的鲁棒性、记忆能力、自学习等能力,在分类、预测、模式识别等方面有着广泛的应用。
卷积神经网络
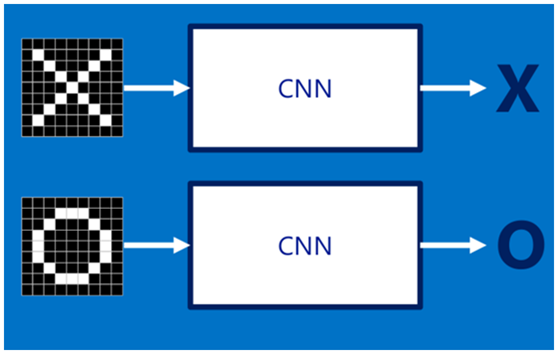
假设给定一张图(可能是字母X或者字母O),通过CNN即可识别出是X还是O,如下图所示,那怎么做到的呢
图像输入
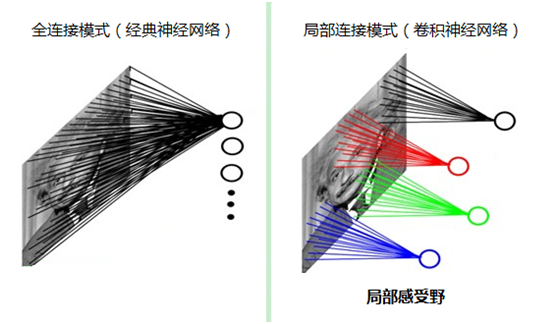
如果采用经典的神经网络模型,则需要读取整幅图像作为神经网络模型的输入(即全连接的方式),当图像的尺寸越大时,其连接的参数将变得很多,从而导致计算量非常大。
而我们人类对外界的认知一般是从局部到全局,先对局部有感知的认识,再逐步对全体有认知,这是人类的认识模式。在图像中的空间联系也是类似,局部范围内的像素之间联系较为紧密,而距离较远的像素则相关性较弱。因而,每个神经元其实没有必要对全局图像进行感知,只需要对局部进行感知,然后在更高层将局部的信息综合起来就得到了全局的信息。这种模式就是卷积神经网络中降低参数数目的重要神器:局部感受野。
提取特征
如果字母X、字母O是固定不变的,那么最简单的方式就是图像之间的像素一一比对就行,但在现实生活中,字体都有着各个形态上的变化(例如手写文字识别),例如平移、缩放、旋转、微变形等等,如下图所示:
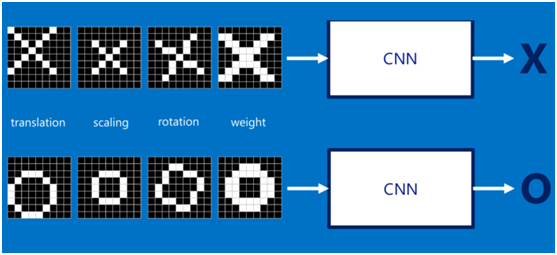
我们的目标是对于各种形态变化的X和O,都能通过CNN准确地识别出来,这就涉及到应该如何有效地提取特征,作为识别的关键因子。
回想前面讲到的“局部感受野”模式,对于CNN来说,它是一小块一小块地来进行比对,在两幅图像中大致相同的位置找到一些粗糙的特征(小块图像)进行匹配,相比起传统的整幅图逐一比对的方式,CNN的这种小块匹配方式能够更好的比较两幅图像之间的相似性。如下图:
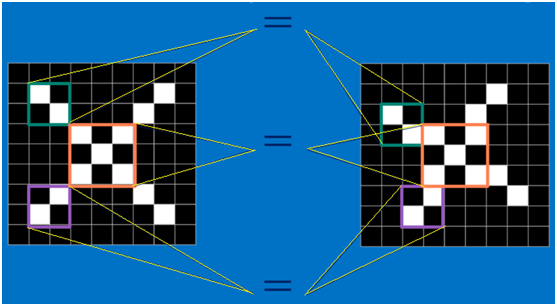
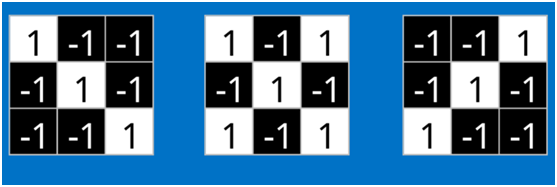
以字母X为例,可以提取出三个重要特征(两个交叉线、一个对角线),如下图所示:
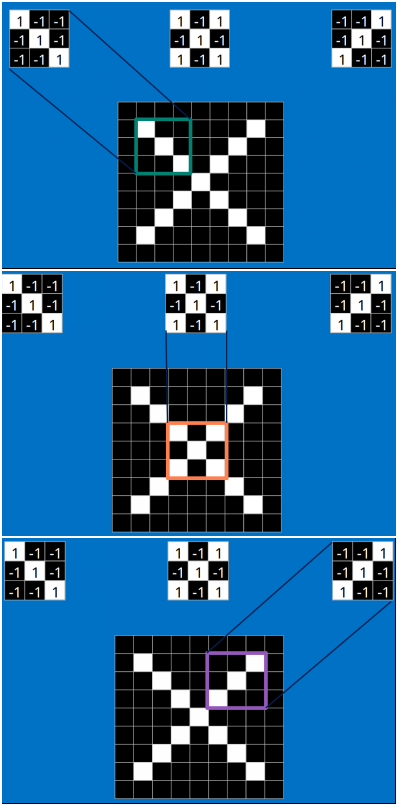
假如以像素值"1"代表白色,像素值"-1"代表黑色,则字母X的三个重要特征如下:
卷积(Convolution)
当给定一张新图时,CNN并不能准确地知道这些特征到底要匹配原图的哪些部分,所以它会在原图中把每一个可能的位置都进行尝试,相当于把这个feature(特征)变成了一个过滤器。这个用来匹配的过程就被称为卷积操作,这也是卷积神经网络名字的由来。
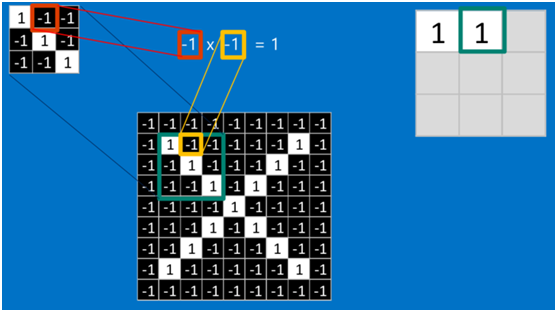
卷积的操作如下图所示:
在本案例中,要计算一个feature(特征)和其在原图上对应的某一小块的结果,只需将两个小块内对应位置的像素值进行乘法运算,然后将整个小块内乘法运算的结果累加起来,最后再除以小块内像素点总个数即可(注:也可不除以总个数的)。
如果两个像素点都是白色(值均为1),那么1x1 = 1,如果均为黑色,那么(-1)x(-1) = 1,也就是说,每一对能够匹配上的像素,其相乘结果为1。类似地,任何不匹配的像素相乘结果为-1。具体过程如下(第一个、第二个……、最后一个像素的匹配结果):
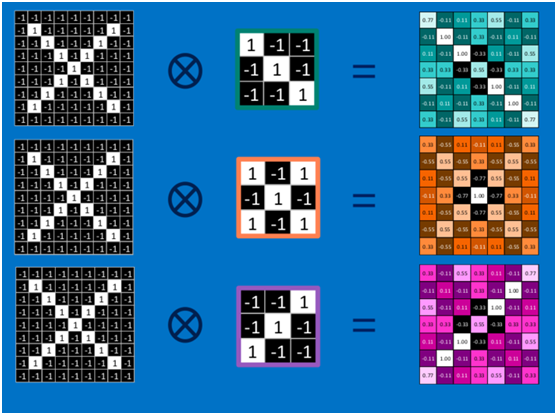
以此类推,对三个特征图像不断地重复着上述过程,通过每一个feature(特征)的卷积操作,会得到一个新的二维数组,称之为 feature map。其中的值,越接近1表示对应位置和feature的匹配越完整,越是接近-1,表示对应位置和feature的反面匹配越完整,而值接近0的表示对应位置没有任何匹配或者说没有什么关联。如下图所示:
可以看出,当图像尺寸增大时,其内部的加法、乘法和除法操作的次数会增加得很快,每一个filter的大小和filter的数目呈线性增长。由于有这么多因素的影响,很容易使得计算量变得相当庞大。
池化(Pooling)
为了有效地减少计算量,CNN使用的另一个有效的工具被称为池化(Pooling)。池化就是将输入图像进行缩小,减少像素信息,只保留重要信息。
池化的操作也很简单,通常情况下,池化区域是2x2大小,然后按一定规则转换成相应的值,例如取这个池化区域内的最大值(max-pooling)、平均值(mean-pooling)等,以这个值作为结果的像素值。
下图显示了左上角2x2池化区域的max-pooling结果,取该区域的最大值max(0.77,-0.11,-0.11,1.00),作为池化后的结果,如下图:
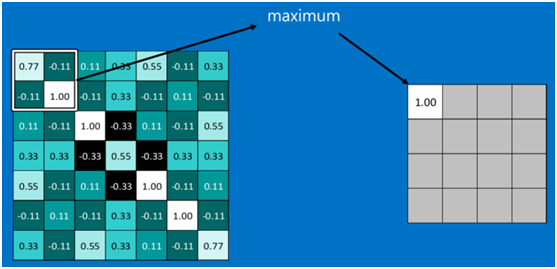
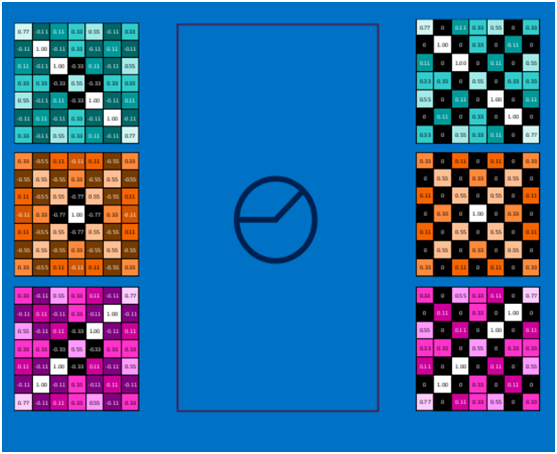
对所有的feature map执行最大池化操作,结果如下:

最大池化(max-pooling)保留了每一小块内的最大值,也就是相当于保留了这一块最佳的匹配结果(因为值越接近1表示匹配越好)。也就是说,它不会具体关注窗口内到底是哪一个地方匹配了,而只关注是不是有某个地方匹配上了。
通过加入池化层,图像缩小了,能很大程度上减少计算量,降低机器负载。
激活函数ReLU (Rectified Linear Units)
常用的激活函数有sigmoid、tanh、relu等等,前两者sigmoid/tanh比较常见于全连接层,后者ReLU常见于卷积层。
回顾一下前面讲的感知机,感知机在接收到各个输入,然后进行求和,再经过激活函数后输出。激活函数的作用是用来加入非线性因素,把卷积层输出结果做非线性映射。
在卷积神经网络中,激活函数一般使用ReLU(The Rectified Linear Unit,修正线性单元),它的特点是收敛快,求梯度简单。计算公式也很简单,max(0,T),即对于输入的负值,输出全为0,对于正值,则原样输出。
下面看一下本案例的ReLU激活函数操作过程:
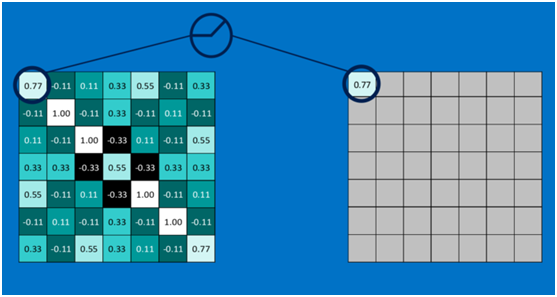
第一个值,取max(0,0.77),结果为0.77,如下图:
第二个值,取max(0,-0.11),结果为0,如下图:
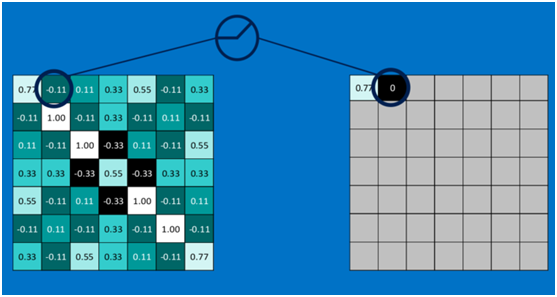
以此类推,所有的feature map经过ReLU激活函数后,结果如下:
深度神经网络
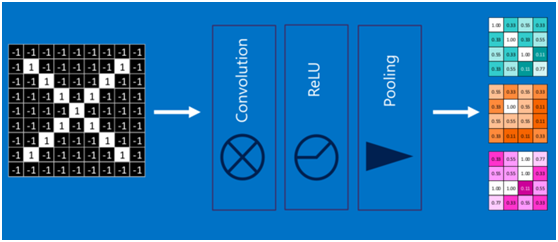
通过将上面所提到的卷积、激活函数、池化组合在一起,就变成下图:
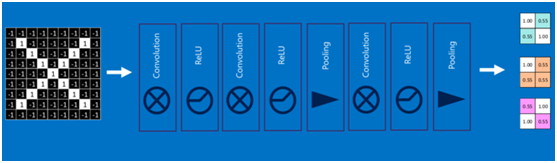
通过加大网络的深度,增加更多的层,就得到了深度神经网络,如下图:
全连接层(Fully connected layers)
全连接层在整个卷积神经网络中起到“分类器”的作用,即通过卷积、激活函数、池化等深度网络后,再经过全连接层对结果进行识别分类。
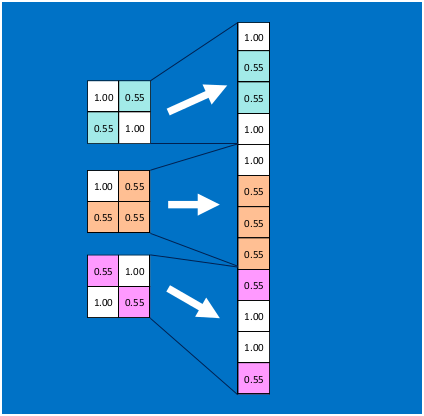
首先将经过卷积、激活函数、池化的深度网络后的结果串起来,如下图所示:
由于神经网络是属于监督学习,在模型训练时,根据训练样本对模型进行训练,从而得到全连接层的权重(如预测字母X的所有连接的权重)
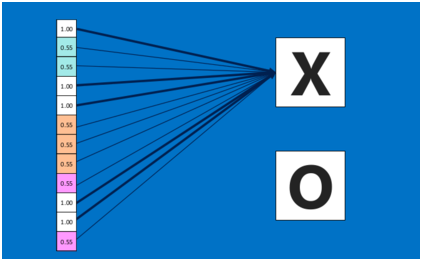
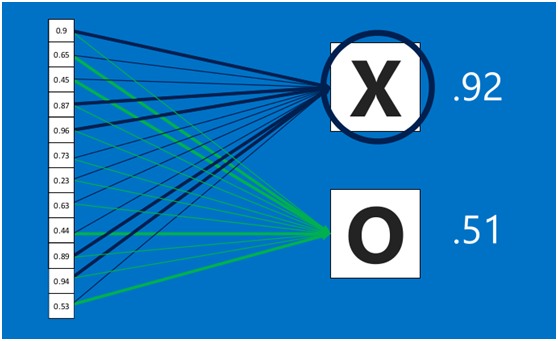
在利用该模型进行结果识别时,根据刚才提到的模型训练得出来的权重,以及经过前面的卷积、激活函数、池化等深度网络计算出来的结果,进行加权求和,得到各个结果的预测值,然后取值最大的作为识别的结果(如下图,最后计算出来字母X的识别值为0.92,字母O的识别值为0.51,则结果判定为X)
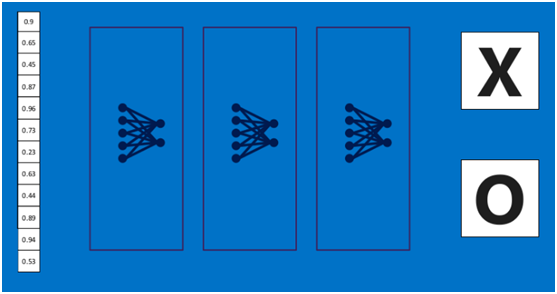
上述这个过程定义的操作为”全连接层“(Fully connected layers),全连接层也可以有多个,如下图:
卷积神经网络(Convolutional Neural Networks)
将以上所有结果串起来后,就形成了一个“卷积神经网络”(CNN)结构,如下图所示:
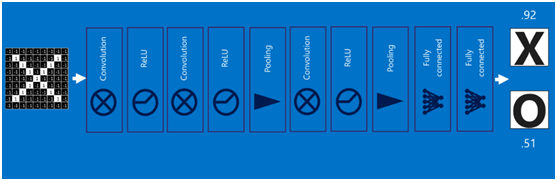
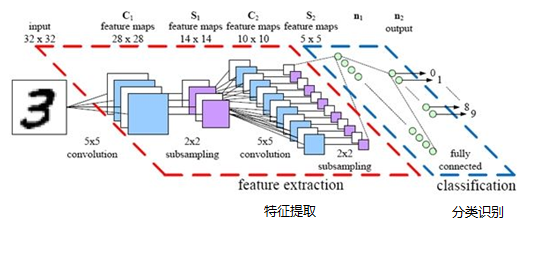
最后,再回顾总结一下,卷积神经网络主要由两部分组成,一部分是特征提取(卷积、激活函数、池化),另一部分是分类识别(全连接层),下图便是著名的手写文字识别卷积神经网络结构图:
步长(stride)和填充(padding)
当我们增加步长值的时候,feature map 的规格持续变小。原来的矩阵与滤波器进行卷积后的结果中损失了部分值,而且用滤波器处理一张图片时,往往在边角处只检测了部分像素点,丢失了图片边界处的众多信息。为解决这个问题,可以在进行卷积操作前,对原矩阵进行边界填充(Padding),也就是在矩阵的边界上填充一些值,以增加矩阵的大小,通常都用“0”作为填充值,例如:
这样,在进行卷积运算时,就存在两种选择:
- Valid 卷积:不进行任何处理,直接卷积卷积,得到的Feature Map 将会比原图像的尺寸小。
- Same 卷积:进行填充,并使得卷积后结果的大小与原图的一致。
卷积过程中,有时需要通过填充来避免信息损失,有时也要在卷积时通过设置的步长(Stride)来压缩一部分信息。
步长、填充、原始尺寸、卷积后的尺寸、滤波器尺寸之间的关系可以表示为:
其中:
\({{W_1}}\),\({{H_1}}\) 是原来的宽度和高度;
\({{W_2}}\),\({{H_2}}\) 是卷积后的宽度和高度;
\(F\) 是滤波器尺寸;
\(P\) 是填充尺寸;
\(S\) 是步长;
\(\left\lfloor {} \right\rfloor\) 是向下取整符号,用于结果不是整数时进行向下取整。
全连接网络与卷积神经网络的对比
全连接网络存在的问题
全连接神经网络之所以不太适合图像识别任务,主要有以下几个方面的问题:
- 参数数量太多
考虑一个输入1000x1000像素的图片(一百万像素,现在已经不能算大图了),输入层有1000x1000=100万节点。假设第一个隐藏层有100个节点(这个数量并不多),那么仅这一层就有(1000x1000+1)x100=1亿参数,这实在是太多了!我们看到图像只扩大一点,参数数量就会多很多,因此它的扩展性很差。
- 没有利用像素之间的位置信息
对于图像识别任务来说,每个像素和其周围像素的联系是比较紧密的,和离得很远的像素的联系可能就很小了。如果一个神经元和上一层所有神经元相连,那么就相当于对于一个像素来说,把图像的所有像素都等同看待,这不符合前面的假设。当我们完成每个连接权重的学习之后,最终可能会发现,有大量的权重,它们的值都是很小的(也就是这些连接其实无关紧要)。努力学习大量并不重要的权重,这样的学习必将是非常低效的。
- 网络层数限制
我们知道网络层数越多其表达能力越强,但是通过梯度下降方法训练深度全连接神经网络很困难,因为全连接神经网络的梯度很难传递超过3层。因此,我们不可能得到一个很深的全连接神经网络,也就限制了它的能力。
卷积神经网络的解决办法
卷积神经网络又是怎样解决这个问题的呢?主要有三个思路:
- 局部连接:这个是最容易想到的,每个神经元不再和上一层的所有神经元相连,而只和一小部分神经元相连。这样就减少了很多参数。
- 权值共享:一组连接可以共享同一个权重,而不是每个连接有一个不同的权重,这样又减少了很多参数。
- 下采样:可以使用Pooling来减少每层的样本数,进一步减少参数数量,同时还可以提升模型的鲁棒性。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号