
模糊控制
1.模糊控制是以模糊集合论、模糊逻辑、模糊语言变量以及模糊推理为基础的一种非线性的计算机数字控制技术。
2.对一些相当复杂的系统, 例如非线性、时变、大滞后的系统,模糊控制器具有很强的实时性和鲁棒性。
3.模糊控制器的非线性逼近能力直接反映了模糊系统的品质。

模糊控制系统或其它类型非线性系统的逼近能力可划分为三种不同的内容: 基于误差的非线性函数逼近能力; 基于泛化能力( Generalization Capability) 的非线性逼进; 基于非线性变化能力( Nonlinearity Variation)的非线性逼进能力。
三种方法用于减少模糊控制规则, 一是规则去除(rule reduction)方式; 二是分层递阶模糊系统结构(hierarchical fuzzy system)方式; 三是并规则结构 (Union Rule Configuration)方式。
“负大”(NB)、“负中”(NM)、“负小”(NS)、“零”(ZO)、“正小”(PS)、“正中”(PM)、“正大”(PB)
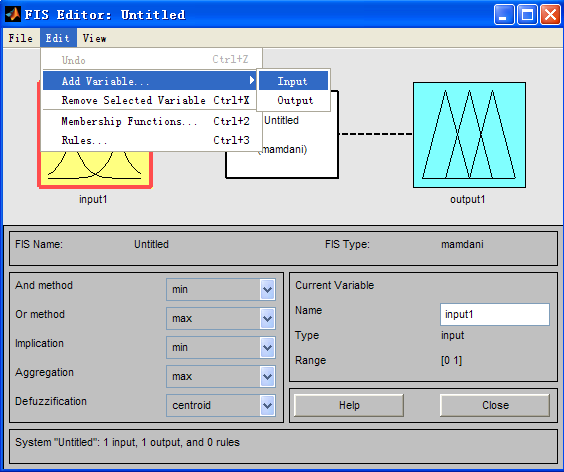
Matlab中模糊控制器穿件演示:
第一步:

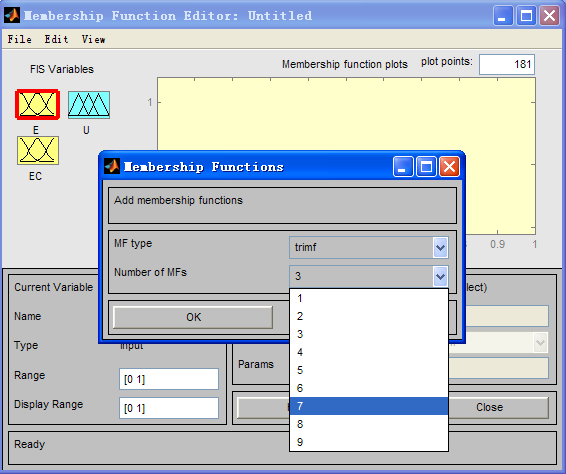
第二步:根据自己需要的输入和输出添加
其中:
 可以修改名字
可以修改名字
第三步:




可以参考: http://blog.csdn.net/gameboy12615/article/details/6367459

 浙公网安备 33010602011771号
浙公网安备 33010602011771号