

优化算法的一些摘要
参考这篇文章:
https://zhuanlan.zhihu.com/p/32230623
深度学习优化算法经历了 SGD -> SGDM -> NAG ->AdaGrad -> AdaDelta -> Adam -> Nadam 这样的发展历程。
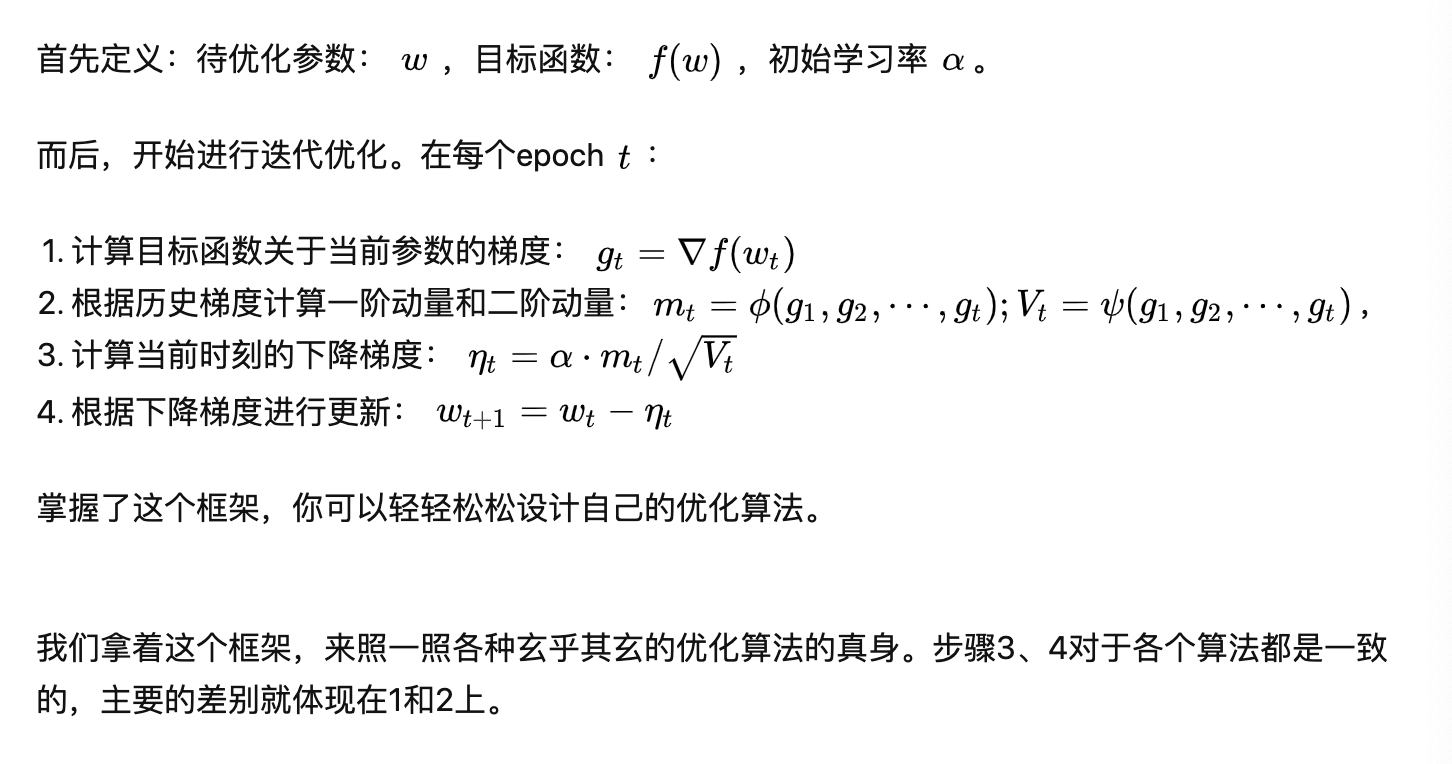
我们换一个思路,用一个框架来梳理所有的优化算法,做一个更加高屋建瓴的对比。
SGD
SGD没有动量的概念,也就是说
代入步骤3,可以看到下降梯度就是最简单的
SGD最大的缺点是下降速度慢,而且可能会在沟壑的两边持续震荡,停留在一个局部最优点。
SGD with Momentum
t时刻的下降方向,不仅由当前点的梯度方向决定,而且由此前累积的下降方向决定。 的经验值为0.9,这就意味着下降方向主要是此前累积的下降方向,并略微偏向当前时刻的下降方向。想象高速公路上汽车转弯,在高速向前的同时略微偏向,急转弯可是要出事的。
SGD with Nesterov Acceleration
SGD 还有一个问题是困在局部最优的沟壑里面震荡。
NAG全称Nesterov Accelerated Gradient
NAG在步骤1,不计算当前位置的梯度方向,而是计算如果按照累积动量走了一步,那个时候的下降方向。

然后用下一个点的梯度方向,与历史累积动量相结合,计算步骤2中当前时刻的累积动量。
AdaGrad
此前我们都没有用到二阶动量。二阶动量的出现,才意味着“自适应学习率”优化算法时代的到来。
SGD及其变种以同样的学习率更新每个参数,但深度神经网络往往包含大量的参数。
对于经常更新的参数,我们已经积累了大量关于它的知识,不希望被单个样本影响太大,希望学习速率慢一些;对于偶尔更新的参数,我们了解的信息太少,希望能从每个偶然出现的样本身上多学一些,即学习速率大一些。
那就是二阶动量——该维度上,迄今为止所有梯度值的平方和:
我们再回顾一下步骤3中的下降梯度:
可以看出,此时实质上的学习率由 变成了
。 一般为了避免分母为0,会在分母上加一个小的平滑项。因此
是恒大于0的,而且参数更新越频繁,二阶动量越大,学习率就越小。
但也存在一些问题:因为 是单调递增的,会使得学习率单调递减至0,可能会使得训练过程提前结束,即便后续还有数据也无法学到必要的知识。
AdaDelta / RMSProp
由于AdaGrad单调递减的学习率变化过于激进,我们考虑一个改变二阶动量计算方法的策略:不累积全部历史梯度,而只关注过去一段时间窗口的下降梯度。这也就是AdaDelta名称中Delta的来历。
这就避免了二阶动量持续累积、导致训练过程提前结束的问题了。
Adam
SGD-M在SGD基础上增加了一阶动量,AdaGrad和AdaDelta在SGD基础上增加了二阶动量。把一阶动量和二阶动量都用起来,就是Adam了——Adaptive + Momentum。
SGD的一阶动量:
加上AdaDelta的二阶动量:
优化算法里最常见的两个超参数 就都在这里了,前者控制一阶动量,后者控制二阶动量。
Nadam
最后是Nadam。我们说Adam是集大成者,但它居然遗漏了Nesterov,这还能忍?必须给它加上。
这就是Nesterov + Adam = Nadam了。
而Adam和Nadam的问题,可以看后面这篇文章:
https://zhuanlan.zhihu.com/p/32262540

 浙公网安备 33010602011771号
浙公网安备 33010602011771号