TensorFlow学习笔记5-概率与信息论
TensorFlow学习笔记5-概率与信息论
本笔记内容为“概率与信息论的基础知识”。内容主要参考《Deep Learning》中文版。
- \(X\)表示训练集的设计矩阵,其大小为m行n列,m表示训练集的大小(size),n表示特征的个数;
- \(W\)表示权重矩阵,其大小是n行k列,n为输入特征的个数,k为输出(特征)的个数;
- \(\boldsymbol{y}\)表示训练集对应标签,其大小为m行,m表示训练集的大小(size);
- \(\boldsymbol{y’}\)表示将测试向量\(x\)输入后得到的测试结果;
- 频率派概率:概率直接与事件发生的频率相联系。贝叶斯概率:概率与事件发生的确定性水平相联系。
概率分布:随机变量(或一簇随机变量)在每个取值的可能性大小。
-
离散型变量:\(P(x=x_1)\),\(x\sim P(x)\)表示随机变量\(x\)服从的概率分布。
- 归一化:\(\sum_ {x_ {i} \in X} P(x_ {i})=1\)
- 多个随机变量的概率分布称为联合概率分布。即\(P(x,y)\)
-
连续型变量:概率密度函数(Probability density function, PDF) \(p(x)\)表示无穷小区域的概率为 \(p(x)\delta x\)。
-
边缘概率:
- 离散型:\(P(x)=\sum_y P(x,y)\)
- 连续型:\(p(x)=\int p(x,y)dy\)
-
条件概率:
\(P(y=y_ 0|x=x_ 0)=\frac{P(y=y_ 0,x=x_ 0)}{P(x=x_ 0)}\) -
条件概率的链式法则:
\(P(a,b,c)=P(a|b,c)P(b,c)P(c)\)\[p(\boldsymbol{x})=p(x_ {1})\prod^{n}_ {i=2}p(x_ {i}|x_ {1},...,x_ {i-1}) \] -
贝叶斯规则:
\[P(x|y)=\frac{P(x)P(y|x)}{P(y)} \] -
变量的独立性:
- \(p(x,y)=p(x)p(y)\),记为\(x \bot y\)
- 条件独立性:\(p(x,y|z)=p(x|z)p(y|z)\),记为\(x \bot y |z\)
-
期望:
- 离散型:\(E_{x \sim P}[f(x)]= \sum_x P(x)f(x)\)
- 连续型:\(E_ {x \sim p}[f(x)]=\int p(x)f(x)dx\)
- 线性的:\(E[af(x)+bg(x)]=aE[f(x)]+bE[g(x)]\)
-
方差:\(Var(f(x))=E[(f(x)-E(f(x)))^2]\)
-
协方差:\(Cov(f(x),g(y))=E[(f(x)-E(f(x)))(g(y)-E(g(y)))]\)
相互独立的两个随机变量协方差一定为0。协方差为0的两个变量不一定独立。
-
协方差矩阵\(Cov(x)_ {i,j} = Cov(x_ i, x_ j)\),其对角元是方差\(Cov(x_ i, x_ i)=Var(x_i)\)
几种分布
- 伯努利分布(二值分布):
- 高斯分布(正态分布):
其中$\mu$为期望,$\sigma ^2$为方差,$\beta = 1/\sigma^2$为精度。
标准正态分布为$\mu=0,\sigma =1$的正态分布。
- 多维正态分布:
其中$\boldsymbol{\mu}$为期望,向量形式,$\boldsymbol{\Sigma}$是分布的协方差矩阵。
- 指数分布:
- LapLace分布:
- Dirac分布:
- 经验分布:
- 混合分布:
混合分布由一系列形如$P(x|c=i)$的组件分布组成。常见的高斯混合模型的组件$P(x|c=i)$是高斯分布。**可用来拟合多峰函数。**
高斯混合模型是概率密度的通用近似器。
常用的函数
-
logistic sigmoid函数:\(\sigma(x)=\frac{1}{1+\exp (-x)}\)
-
softplus函数:\(\zeta(x) = \log (1+ \exp (x))\)可用来产生正态分布的\(\beta\)和\(\sigma\)参数。
- $ \sigma (x)=\frac{ \exp (x)}{\exp(x)+\exp(0)}$
- $ \frac{d}{dx}\sigma (x)=\sigma (x)(1-\sigma (x))$
- $ 1-\sigma (x)=\sigma (-x)$
- $ \log \sigma (x)= -\zeta(-x)$
- $ \frac{d}{dx}\zeta(x)=\sigma(x)$
- $ \forall x \in (0,1),\sigma^{-1}(x)= \log (\frac{x}{1-x})$
- $ \forall x>0, \zeta^{-1}(x)=\log (\exp (x)-1)$
- $ \zeta(x)=\int^x_ {-\infty} \sigma(y)dy$
- $ \zeta (x)-\zeta (-x)=x$
确定函数关系的两个随机变量的概率分布函数
- 设\(y=g(x)\),要保证\(|p_ y (g(x))dy| = |p_ x(x)dx|\) ,可以得到
或
高维空间中,扩展为:
信息论基础
-
事件\(x=x_0\)的自信息为\(I(x)=-\log P(x)\)。当底数为\(e\)时,信息量单位为奈特(nats),底数为2时,单位为比特或香农。这里底数为\(e\)。
-
香农熵为$$H(x)=E_ {x \sim P}[I(x)]=-\sum_ {i} P(x_ {i})\log P(x_ {i})$$
-
对同一个随机变量的两种单独的概率分布\(P(x)\)和\(Q(x)\),其差异用KL散度衡量:$$D_ {KL}(P||Q)=E_ {x \sim P}[\log \frac{P(x)}{Q(x)}]
=E_ {x \sim P}[\log P(x) - \log Q(x)]=\sum_ {i} P(x_ {i})(\log P(x_ {i})- \log Q(x_ {i}))$$
注意计算\(D_ {KL}(P||Q)\)还是\(D_ {KL}(Q||P)\)是不一样的,因为\(D_ {KL}(P||Q) \neq D_ {KL}(Q||P)\)
。KL散度是不对称的。
一般已经拿到了\(p(x)\)的分布,用\(q(x)\)去近似。可以选择最小化\(D_ {KL}(P||Q)\)或\(D_ {KL}(Q||P)\)。在机器学习中,\(P(x),Q(x)\)分别为基于数据集的经验分布(已知的)与设计的模型概率分布(估计的)。
最大化似然就是最小化KL散度,由于\(\sum_i P(x_i)logP(x_i)\)与模型无关,故最小化KL散度就是最小化交叉熵。 -
交叉熵:
综上:在机器学习中,最大似然估计,等价于最小化交叉熵。即:任何时候优化函数就是交叉熵,也就是对数似然组成的损失函数(即式\((1)\))。
结构化概率模型-分解联合概率分布的计算
若3个随机变量a,b,c满足:a影响b的取值,b影响c的取值,但a和c在给定b时是条件独立的(\(p(a,c|b)=p(a|b)p(c|b)\)),则:
- 有向图模型分解:\(p(\boldsymbol{x})=\prod_ {i} p(x_i |Pa\ g(x_i))\),其中\(Pa\ g(x_i)\)为节点$x_i $的父节点。
- 无向图模型分解:图中 任何两两节点之间有边连接的节点的集合称为团,每个团有一个因子\(\phi^{(i)}(C^{(i)})\),这些因子是非负的。
整体的联合分布为\(p(\boldsymbol{x})=\frac{1}{Z}\prod_ {i}\phi^{(i)}(C^{(i)})\),其中\(Z\)为归一化常数。
独立同分布与估计
通常我们有样本,却不知道其中的概率密度模型如何。设每次采样是独立同分布的。
测试集样本独立同分布很多时,中心极限定理:样本均值接近高斯分布。
统计中的量:
- 样本均值:m个样本的平均值\(\bar{x}=\frac{\sum_ {i}x_ {i}}{m}\)
- 样本方差:\(\sigma ^2 = \frac{1}{m}\sum^m_ {i=1}(x_ {i}-\bar{x})^2\)
概率论中的量:
- 数学期望:\(E(f(x))=\sum_ {i}f(x_ {i})P(x_ {i})\)或\(E(f(x))=\int f(x)p(x)dx\)
- 方差:\(var [f(x)]=E[(f(x)-E[f(x)])^2]\)
常用样本均值估计:
- 二值分布的独立同分布的模型的 \(\theta\)参数 ;无偏估计。
- 高斯分布的 \(\mu\)参数 。无偏估计。
常用样本方差估计:
- 高斯分布的 \(\sigma ^2\)参数 ,有偏估计。
- 用 \(\frac{m}{m-1}\times\)样本方差 去估计高斯分布的 \(\sigma ^2\)参数,无偏估计。
- 虽然有偏,但还是用样本方差估计高斯分布的 \(\sigma ^2\)参数较多(样本量较大时,近似无偏)。
- 估计量的偏差:\(bias(\hat{\theta}_ {m})=E(\hat{\theta}_ {m})-\theta\)
其中,\(\hat{\theta}_ {m}\)为你从m个样本数据中计算出来的估计量,\(\theta\)为你要估计的模型中的参数。
- 估计量的方差用公式\(Var [\hat{\theta}_ {m}]=E[(\hat{\theta}_ {m}-E[\hat{\theta}_ {m}])^2]\)计算。
- 估计量的标准差为:\(\sigma = \sqrt{Var(\hat{\theta})}\)
- 例如:样本均值的标准差为\(SE(\bar{x})=\sqrt{Var(\bar{x})}=\frac{\sigma}{\sqrt{m}}\)
那么优化时,选择优化估计量的偏差还是优化估计量的方差呢?
- 如果选择最优化偏差,则方差可能很大,更关注整体,是一种欠拟合(训练误差较大);
- 如果选择最优化方差,则偏差可能很大,更关注细节,是一种过拟合(训练误差与测试误差差距较大)。
- 选择最优化 均方误差(Mean Squared Error) 可以获得一种均衡。
对均方误差的进一步解释
以回归任务为例:对测试样本\(x\),令\(y_ {D}\)为\(x\)在数据集中的标记,\(y\)为\(x\)的真实模型中标记,\(f(x;D)\)为训练集\(D\)上的模型的预测输出。
方差
在一个训练集\(D\)上模型 \(f\) 对测试样本 \(x\)的预测输出为 \(y'=f(x;D)\), 那么学习算法 \(f\) 对测试样本 \(x\) 的 期望预测 为:
上面的期望预测也就是针对 不同数据集 \(D\), \(f\) 对 \(x\) 的预测值取其均值, 也被叫做 均值预测.
使用样本数相同的不同训练集产生的方差为:
噪声
噪声为真实标记与数据集中的实际标记间的偏差:
为方便起见,设噪声期望为0,即\(E_ {D}[y_ {D}-y]=0\)
偏差
期望预测与真实标记的误差称为偏差(bias), 为了方便起见, 我们直接取偏差的平方:
估计的评价:均方误差(Mean Squared Error)
参考周志华老师书里的 期望泛化误差:均方误差[1]:
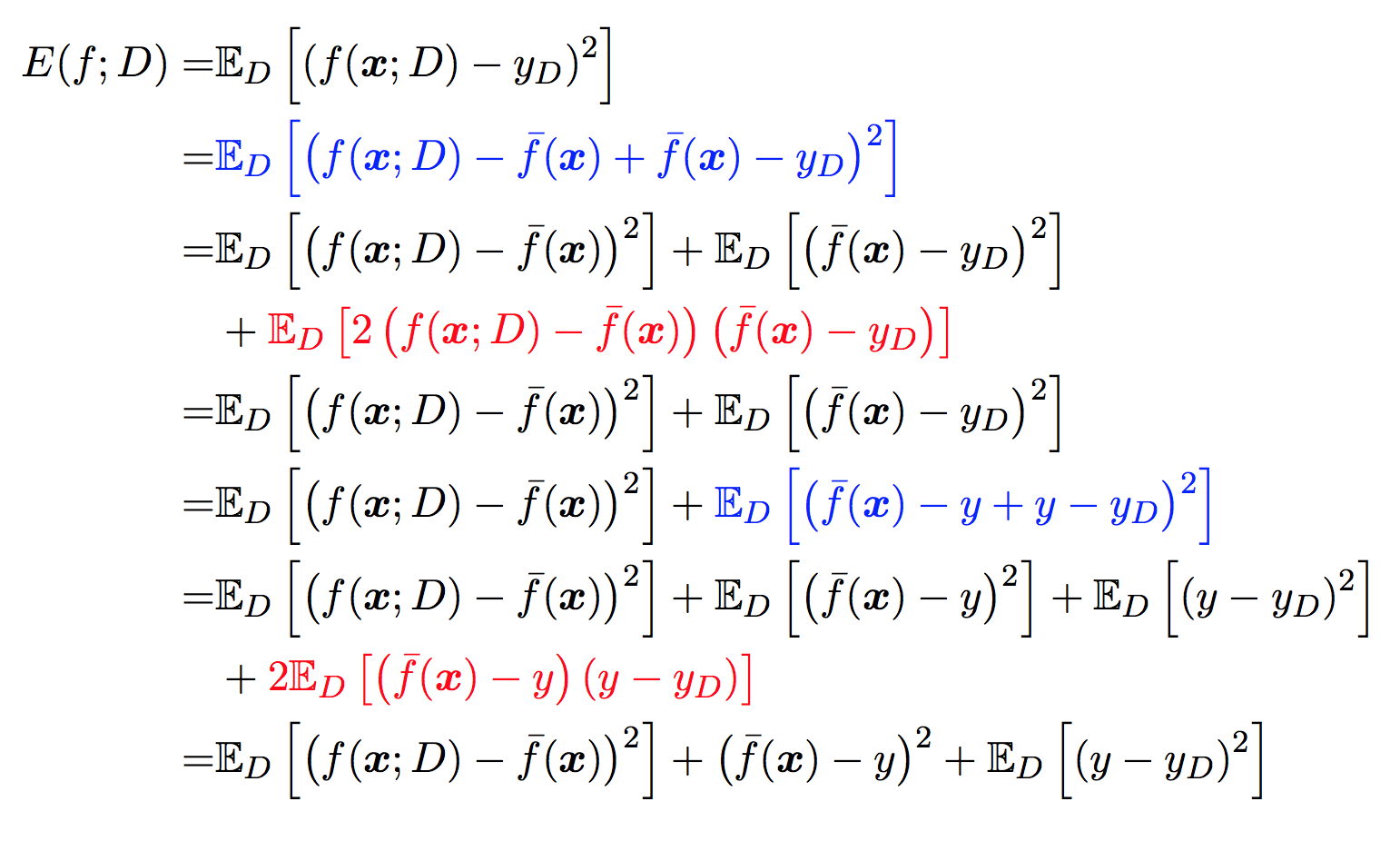
其中应用到了\(E_{D}[y_D -y]=0\)和\(E[f(x;D)]=\bar{f}(x)\)。
实际应用时 直接计算均方误差
学习算法的平方预测误差期望为(记\(y'=f(x;D)\))[2]:
两者的差别在于:式\((1)\) 没有考虑\(y_D\) 与 \(y\) 之间的误差,这就是噪声。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号