TensorFlow学习笔记4-线性代数基础
TensorFlow学习笔记4-线性代数基础
本笔记内容为“AI深度学习”。内容主要参考《Deep Learning》中文版。
- \(X\)表示训练集的设计矩阵,其大小为m行n列,m表示训练集的大小(size),n表示特征的个数;
- \(W\)表示权重矩阵,其大小是n行k列,n为输入特征的个数,k为输出(特征)的个数;
- \(\boldsymbol{y}\)表示训练集对应标签,其大小为m行,m表示训练集的大小(size);
- \(\boldsymbol{y’}\)表示将测试向量\(x\)输入后得到的测试结果;
几个概念
- 深度学习
如果想让计算机构建较简单的概念来学习复杂概念,我们可能需要一个深的(层次很多的)计算图,这种方法叫做AI深度学习。典型例子是前馈神经网络和多层感知机(multilayer perceptron, MLP)。
神经网络的深度的度量:
- 计算图的深度(计算层次)
- 概念图的深度(模型层次)
深度学习、机器学习与AI的关系如图:
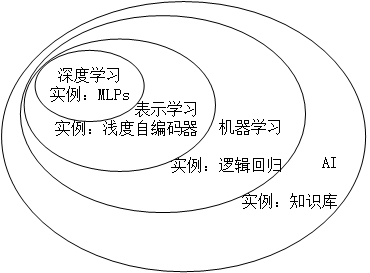
- 表示学习
机器学习需要特征集,但我们很难知道应提取什么特征。如:我们想识别出图片中是否有汽车,想到用车轮是否存在作为一个特征,但如何根据像素值去描述什么是车轮呢?这就需要表示学习。表示学习可帮助发现很好的特征集。
- 自编码器
表示学习的典例是自编码器(autoencoder)。它希望:
- 输入数据\(X\)和输出数据\(X’\)尽可能保持一致;
- 新的表现形式\(Y\)具有各种好的特性。

线性代数基础
- 标量: 一个数字,用斜体表示,如\(x,y,i,j,k,m,n\)等。
- 向量:一 列 数字。用粗体表示,如\(\boldsymbol{x,y,b}\)等。如果向量有n个元素且都属于\(\boldsymbol{R}\),则该向量\(\boldsymbol{x \in{R^n} }\)。
表示方法:
- \(x_i\) is 第\(i\)个元素。
- \(x_{-1}\) is 除\(x_1\)之外的所有元素。
- 向量永远是一列的:\(x=(1,2,3)^T\)
- 矩阵:\(\boldsymbol{A}\),\(\boldsymbol{A \in{R^{m \times n} } }\)
表示方法:
- \(A_{i,j}\)表示第i行第j列的元素。
- \(A_{i,:}\)表示第i行的向量。
- 矩阵的操作:
- 转置:\(A^T_{i,j}=A_{j,i}\)
- 广播:\(C=A+b\),相当于 \(C_{i,j}=A_{i,j}+b_j\)
- 乘法:服从分配律、结合律,不服从交换律。
- 单位阵:\(I_n\)
- 逆矩阵:\(A^{-1}A=I_n\)
- 方程式 \(Ax=b\) 的解形式为:\(x=A^{-1}b\),前提是矩阵A有逆矩阵。
解的个数有三种情况:
* 0个解(解不存在);
* 1个解;
* 无穷个解;
* C个解(\(1<C<\infty\)):该情况:若x,y是其解,则\(z=\alpha x+(1-\alpha )y, \alpha 取任意实数\) 也是解
\(Ax=b\)有且仅有1个解的充要条件是矩阵A有逆。
-
线性组合:方程\(Ax=b\)可写作\(Ax=\sum_i x_i A_{:,i}=b\)
-
生成子空间是一组向量线性组合后能抵达的点的集合。故
\(\boldsymbol{Ax=b}\)是否有解 相当于 向量b是否在矩阵A的列向量的生成子空间中。
-
-
A的值域(列空间):矩阵A的列向量的生成子空间。
-
奇异:如果方阵的列向量线性相关,则称方阵是奇异的。否则是非奇异的。
要使\(Ax=b\)对任意的\(b \in R^m\)均有解,则要求A的列空间涵盖整个\(R^m\)空间,即矩阵A至少有m列线性无关的列向量。故\(n \geq m\)。
要使\(Ax=b\)对任意的\(b \in R^m\)均只有1个解,则要求A的列空间构成整个\(R^m\)空间,
即矩阵A恰好有m列线性无关的列向量。所以非奇异的 m*m的方阵对任意\(b \in R^m\)均只有1个解,此时A一定有逆矩阵。
- 范数:衡量向量的大小。\(L^p\)范数定义为
其中\(p\in R, p \geq 1\)。
常用的是\(L^2\)范数,称为欧几里得范数。其平方常称为平方\(L^2\)范数,可通过\(x^T x\)计算。
当区分小值和0的时候,由于平方\(L^2\)范数在原点附近增长很慢,常用\(L^1\)范数:
最大范数表示向量中具有最大幅值的元素的绝对值:
Frobenius范数衡量矩阵大小:
-
对角矩阵:用\(diag(\boldsymbol{v})\)表示由向量\(\boldsymbol{v}\)构成的对角阵。
- 对角阵的逆:\(diag(\boldsymbol{v})^{-1}=diag([1/v_ {1},...,1/v_ {n}]^ {T})\)
-
对称矩阵: \(A=A^T\)
-
正交向量:\(x^T y=0\),如果范数均为1,则称为标准正交。
-
正交矩阵:行向量标准正交,列向量也标准正交。则\(A^T A = A A^T =I\),这时\(A^{-1}=A^{T}\)。
-
特征向量与特征值:
满足$$Av=\lambda v$$的\(v\)称为特征向量,\(\lambda\)称为特征值。
推导:设A有n个线性无关的特征向量,写成矩阵\(V=(v^{(1)} ,...,v^{(n)})\),对应特征值为
\((\lambda_1,...,\lambda_n)\),写成向量\(\boldsymbol{\lambda} = [\lambda_1,...,\lambda_n]^T\)。
则\(AV = A( v^{(1)} ,...,v^{(n)} ) = ( v^{(1)} ,...,v^{(n)} ) diag(\boldsymbol{\lambda}) = V diag(\boldsymbol{\lambda}) \rightarrow A=V diag(\boldsymbol{\lambda}) V^{-1}\)。这就是A的特征分解。
\(Av=\lambda v\)的理解如下图:

-
每个实对称矩阵都可以分解为\(A=Q \boldsymbol{\Lambda} Q^{T}\),其中\(Q\)为A的特征向量组成的正交矩阵,可以将A看作沿方向\(v^{(i)}\)延展\(\lambda_i\)倍的空间。
-
二次方程\(f(x)= x^T Ax\),其中\(||x||_ {2} =1\)。当\(x\)为某特征向量时,f将返回对应的特征值。
-
正定阵:所有特征值都是正数;如果正定阵A满足\(x^T Ax =0\),则\(x=0\)。
-
半正定:所有特征值都是非负数;半正定矩阵的\(x^T Ax \geq 0\)
-
奇异值分解(Singluar Value Decomposition, SVD):类似于\(A=V diag(\boldsymbol{\lambda}) V^{-1}\),将矩阵A分解为\(A=UDV^{-1}\),U是\(m \times m\)正交方阵,D是\(m \times n\)对角矩阵,V是\(n \times n\)正交方阵。
- U的列向量为左奇异向量,是\(AA^T\)的特征向量;
- V的列向量为右奇异向量,是\(A^T A\)的特征向量;
- 对角矩阵D的元素为矩阵A的奇异值,是\(AA^T\)特征值的平方根,同时也是\(A^T A\)特征值的平方根。
-
Moore-Penrose伪逆:求解\(Ax=y\)时,\(x=A^{-1}y\),但矩阵A可能没有逆矩阵。伪逆为:
计算时,\(A^+ =VD^+ U^T\),其中U、D、V时矩阵奇异值分解后得到的矩阵。对角矩阵D的伪逆\(D^+\)是其非零元素取倒数之后再转置得到的。
得到\(x=A^+ y\)。
-
迹:\(Tr(A) = \sum_i A_ {i,i}\)。矩阵A的Frobenius范数的另一种形式\(||A||_ {F} =\sqrt{Tr(AA^T)}\)
- \(Tr(A)=Tr(A^T)\)
- \(Tr(ABC)=Tr(CAB)=Tr(BCA)\)
- \(a=Tr(a)\)
-
行列式:\(det(A)\)为矩阵特征值的乘积。
-
利用上述知识可推导主成分分析(Principal Components Analysis, PCA)的公式。
补充:矩阵求导相关公式
下列\(\boldsymbol{a}\)与\(A\)均为常数组成的向量和矩阵,\(\boldsymbol{x}\)为自变量(向量形式)。请自行推导。
-
\[\frac{\partial a^T x}{\partial x}=\frac{\partial x^T a}{\partial x}=a \tag{1} \]
-
\[\frac{\partial x^T A}{\partial x}=A \tag{2} \]
-
\[\frac{\partial x^T Ax}{\partial x}=(A+A^T)x \tag{3} \]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号