第4章-变换-4.2-特殊矩阵变换和运算
4.2 特殊矩阵变换和运算
在本节中,将介绍和导出对实时图形必不可少的几个矩阵变换和运算。首先,我们介绍了欧拉变换(连同它的参数提取),这是一种描述方向的直观方式。然后我们谈到从单个矩阵中反演一组基本变换。最后,导出了一种方法,可以绕任意轴旋转实体。
4.2.1 欧拉变换
此变换是构建矩阵,以将你自己(即相机)或任何其他实体定向到某个方向的直观方式。它的名字来源于伟大的瑞士数学家莱昂哈德·欧拉(Leonhard Euler,1707-1783)。
首先,必须建立某种默认的视图方向。大多数情况下,它朝向负z轴,头部沿y轴定向,如图4.7所示。欧拉变换是三个矩阵的相乘,即图中所示的旋转。更正式地,表示为\(\textbf{E}\)的变换由公式4.21给出:
矩阵的顺序可以以24种不同的方式进行选择[1636];我们介绍这个是因为它很常用。由于\(\textbf{E}\)是旋转矩阵的级联,因此它显然也是正交的。因此,它的逆可以表示为\({\textbf{E}}^{-1} = {\textbf{E}}^{T} = ({\textbf{R}}_z{\textbf{R}}_x{\textbf{R}}_y)^T = {\textbf{R}}^T_y{\textbf{R}}^T_x{\textbf{R}}^T_z\),当然,尽管直接使用\(\textbf{E}\)的转置更容易。
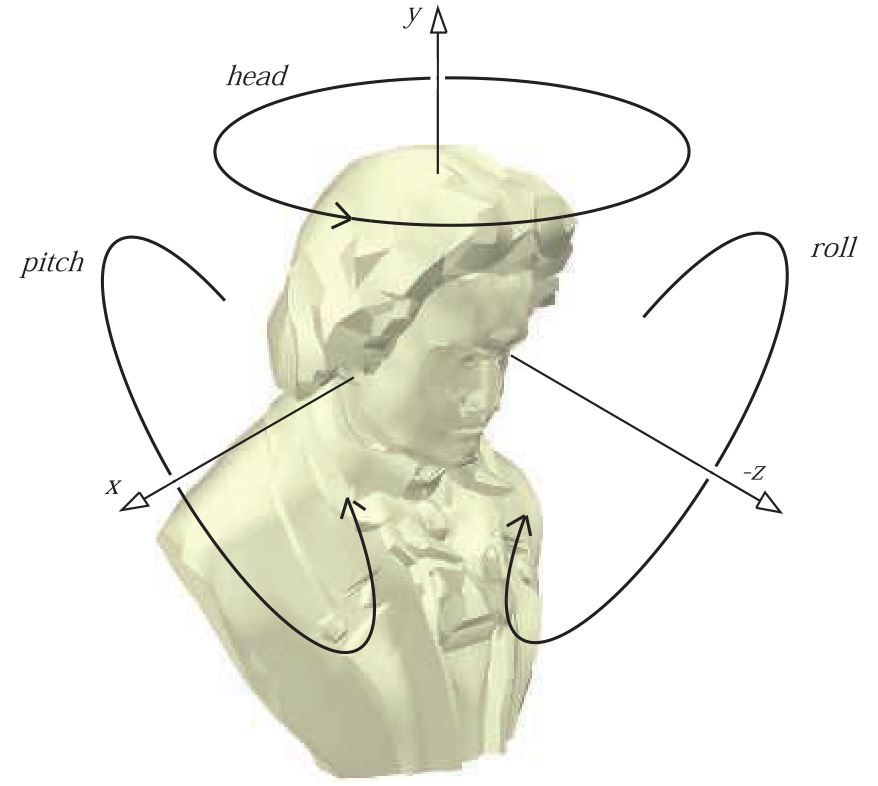
图4.7. 欧拉变换,以及它如何与你改变航向、俯仰和滚动角度的方式相关联。显示默认视图方向,沿负z轴朝向,沿y轴向上方向。
欧拉角\(h\)、\(p\)和\(r\)表示航向、俯仰和滚转应围绕各自的轴旋转的顺序和程度。有时这些角度都被称为“滚动”,例如,我们的“航向”是“y-roll”,我们的“俯仰”是“x-roll”。 此外,“航向”有时也称为“偏航”,例如在飞行模拟中。
这种转换是直观的,因此很容易用外行的语言进行讨论。例如,改变航向角使观看者摇头“不”,改变俯仰角使他们点头,而改变滚动角度使他们将头侧向倾斜。我们不讨论围绕x轴、y轴和z轴的旋转,而是讨论改变航向、俯仰和滚动。请注意,此变换不仅可以定向相机,还可以定向任何对象或实体。可以使用世界空间的全局轴或相对于局部参考系来执行这些变换。
重要的是要注意,欧拉角的一些表示将z轴作为初始向上方向。这种差异纯粹是一种符号变化,尽管可能会令人困惑。在计算机图形学中,在如何看待世界以及如何形成内容方面存在分歧:y-up或z-up。大多数制造过程,包括3D打印,都认为z方向在世界空间中;航空和海上交通工具认为-z向上。建筑和GIS通常使用z-up,因为建筑平面图或地图是二维的,x和y。与媒体相关的建模系统通常将y方向视为世界坐标中的向上,这与我们在计算机图形中始终描述相机屏幕向上方向的方式相匹配。这两个坐标系向上向量选择之间的区别只是90度旋转(可能还有一个反射),但不知道假设哪个会导致问题。在本卷中,除非另有说明,否则我们使用y-up的世界方向。
我们还想指出,相机在其视图空间中的向上方向与世界的向上方向没有特别的关系。转动你的头,视图是倾斜的,它的世界空间向上方向与世界不同。再举一个例子,假设世界使用y-up,我们的相机直视下方的地形,鸟瞰图。这个方向意味着相机向前倾斜了90度,因此它在世界空间中的向上方向是\((0,0,-1)\)。在这个方向上,相机没有y分量,而是认为-z在世界空间中是向上的,但根据定义,“y是向上”在视图空间中仍然是正确的。
虽然对于小角度变化或观察者定向很有用,但欧拉角还有一些其他严重的限制。很难将两组欧拉角组合使用。例如,一组和另一组之间的插值并不是对每个角度进行插值的简单问题。事实上,两组不同的欧拉角可以给出相同的方向,因此任何插值都不应该旋转对象。这些是使用替代方向表示(如本章稍后讨论的四元数)值得研究的一些原因。使用欧拉角,你还遇到被称为万向节死锁的问题,这将在接下来的第4.2.2节中解释。
4.2.2 从欧拉变换中提取参数
在某些情况下,从正交矩阵中提取欧拉参数\(h\)、\(p\)和\(r\)的过程很有用。此过程如公式4.22所示:
在这里,我们放弃了\(4×4\)矩阵,改为\(3×3\)矩阵,因为后者提供了旋转矩阵的所有必要信息。也就是说,等效的\(4×4\)矩阵的其余部分总是在右下角位置包含0和1。
将方程4.22中的三个旋转矩阵连接起来得到:
显而易见,俯仰角参数由\({\rm{sin}}p=e_{21}\)给出。此外,将\(e_{01}\)除以\(e_{11}\),类似地将\(e_{20}\)除以\(e_{22}\),得到以下航向角和翻滚角参数的提取方程:
因此,使用函数\(\rm{atan2}(y,x)\)(参见第1章的第8页)从矩阵\(\textbf{E}\)中提取欧拉参数\(h\)(航向)、\(p\)(俯仰)和\(r\)(滚动),如公式4.25所示:
但是,我们需要处理一个特殊情况。如果\({\rm{cos}}p = 0\),我们会遇到万向节死锁的问题(第4.2.2节):旋转角\(r\)和\(h\)将围绕同一轴旋转(尽管可能在不同的方向上,取决于\(p\)旋转角是\(-\pi/2\)还是\(\pi/2\)),所以只需要推导出一个角度。如果我们任意设置\(h = 0\)[1769],我们得到
因为\(p\)不影响第一列中的值,当\({\rm{cos}}p = 0\)时我们可以使用\({\rm{sin}}r/{\rm{cos}}r = {\rm{tan}}r = e_{10} /e_{00}\),可给出\(r = {\rm{atan2}}(e_{10} ,e_{00})\)。
注意,从arcsin的定义来看,\(-π/2 ≤ p ≤ π/2\),这意味着如果\(\textbf{E}\)是用超出这个区间的p值创建的,则无法提取原始参数。\(h\)、\(p\) 和\(r\)不是唯一的,这意味着可以使用一组以上的欧拉参数来产生相同的变换。更多关于欧拉角转换的信息可以在Shoemake在1994年的文章[1636] 中找到。上面概述的简单方法可能会导致数值不稳定的问题,这是可以避免的,但会降低速度[1362]。
当您使用欧拉变换时,可能会产生称为万向节死锁的问题[499,1633]。当进行旋转从而失去一个自由度时,就会发生这种情况。例如,假设变换的顺序是x/y/z。考虑仅围绕y轴旋转π/2,进行第二次旋转。这样做会旋转局部z轴以与原始x轴对齐,因此围绕z的最终旋转是多余的。
在数学上,我们已经在公式4.26中看到了万向死节锁,其中我们假设\({\rm{cos}}p = 0\),即\(p = ±π/2 + 2πk\),其中\(k\)是一个整数。有了这样的\(p\)值,我们失去了一个自由度,因为矩阵只取决于一个角度,\(r + h\)或\(r − h\)(但不能同时取决于两者)。
虽然欧拉角在建模系统中通常呈现为\(x/y/z\)顺序,但围绕每个局部轴旋转,其他排序也是可行的。例如,\(z/x/y\)用于动画,而\(z/x/z\)用于动画和物理。所有这些都是指定三个独立旋转的有效方法。最后一个顺序,z/x/z,对于某些应用来说可能更好,因为只有当围绕x轴旋转\(\pi\)弧度(半旋转)时才会发生万向节死锁。没有完美的序列可以避免万向节死锁。尽管如此,欧拉角还是常用的,因为动画师更喜欢曲线编辑器来指定角度如何随时间变化 [499]。
示例:约束一个变换。想象一下,你正握着一个(虚拟)扳手正夹住螺栓。要将螺栓固定到位,您必须围绕x轴旋转扳手。现在假设您的输入设备(鼠标、VR手套、太空球等)为你提供了一个旋转矩阵,即用于扳手移动的旋转。问题是将这个变换应用到扳手可能是错误的,它应该只围绕x轴旋转。要将称为\(\textbf{P}\)的输入变换限制为绕x轴旋转,只需使用本节中描述的方法提取欧拉角\(h\)、\(p\) 和\(r\),然后创建一个新矩阵\(\textbf{R}_x(p)\)。这就是广受欢迎的变换,它将围绕x轴旋转扳手(如果\(\textbf{P}\)现在包含这样的运动)。
4.2.3 矩阵分解
到目前为止,我们一直在假设我们知道我们正在使用的转换矩阵的起来和过程。通常情况并非如此。例如,可能与某个变换对象关联的只不过是一个级联矩阵。从级联矩阵中反推各种变换的任务称为矩阵分解。
反推一组转换的原因有很多。用途包括:
- 仅提取对象的缩放因子。
- 查找特定系统所需的转换。(例如,某些系统可能不允许使用任意\(4×4\)矩阵。)
- 确定模型是否仅经历了刚体变换。
- 在只有对象矩阵可用的动画中的关键帧之间进行插值。
- 从旋转矩阵中移除剪切。
我们已经介绍了两种分解,即为刚体变换导出平移和旋转矩阵(第4.1.6节)和从正交矩阵导出欧拉角(第4.2.2节)。
正如我们所见,反推平移矩阵很简单,因为我们只需要\(4×4\)矩阵的最后一列中的元素。我们还可以通过检查矩阵的行列式是否为负来确定是否发生了反射。分离出旋转、缩放和剪切需要进行更多的工作。
幸运的是,有几篇关于这个主题的文章,以及在线可用的代码。Thomas[1769]和Goldman[552,553]各自提出了不同类别的转换方法。Shoemake[1635]改进了他们的仿射矩阵技术,因为他的算法独立于参考系,并尝试分解矩阵以获得刚体变换。
4.2.4 绕任意轴旋转
有时,将实体绕任意轴旋转某个角度的过程是很方便的。假设旋转轴\(\textbf{r}\)已正则化,并且创建了一个围绕\(\pmb{r}\)旋转\(\alpha\)弧度的变换。
为此,我们首先变换到一个空间,其中我们想要旋转的轴是x轴。这是通过一个称为\(\textbf{M}\)的旋转矩阵完成的。然后执行实际的旋转,我们使用\(\textbf{M}^{-1}\)[314]变换回来。 此过程如图4.8所示。
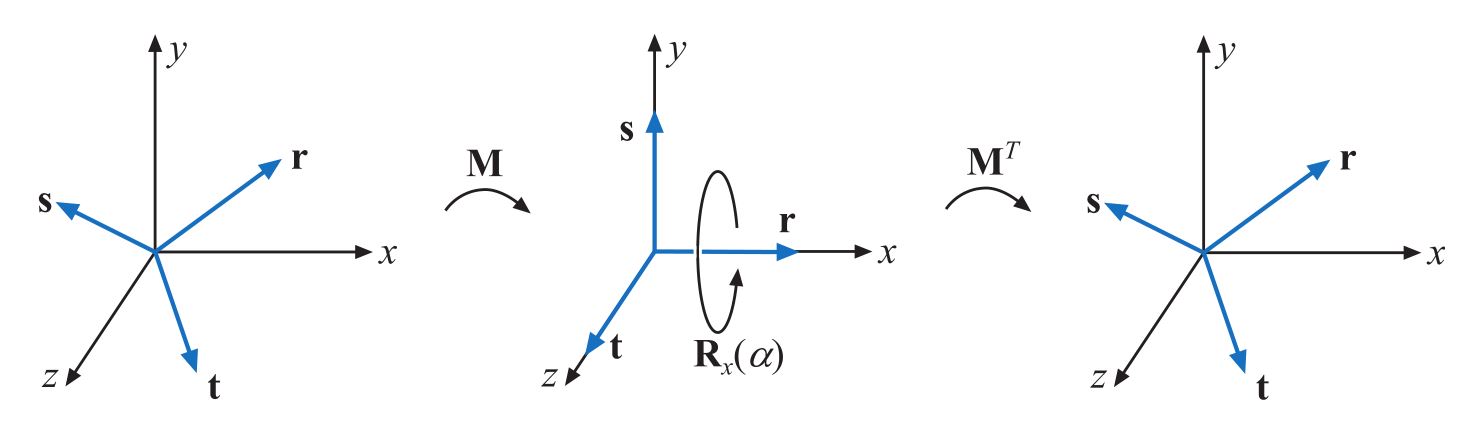
图4.8. 绕任意轴\(\textbf{r}\)的旋转是通过找到由\(\textbf{r}\)、\(\textbf{s}\)和\(\textbf{t}\)形成的标准正交基来完成的。然后我们将此基与标准基对齐,以便\(\textbf{r}\)与x轴对齐。在这个标准基中进行绕x轴的旋转,最后我们变换回原来的坐标基。
为了计算\({\textbf{M}}\),我们需要找到两个与\(\textbf{r}\)和彼此正交的轴。我们专注于找到第二个轴\(\textbf{s}\),因为第三个轴\(\textbf{t}\)将是第一个和第二个轴的叉积:\(\textbf{t} = \pmb{r} × \pmb{s}\)。一个数值稳定的方法是找到\({\textbf{r}}\)的最小分量(绝对值),并将其设置为0。交换剩余的两个分量,然后取反第一个(实际上,任何一个非零分量都可以取反)。在数学上,这表示为[784]:
这保证\(\overline{\textbf{s}}\)与\(\textbf{r}\)正交(垂直),并且\((\textbf{r},\pmb{s},\pmb{t})\)是正交基。Frisvad[496]提出了一种代码中没有任何分支的方法,该方法速度更快但精度较低。Max[1147]和Duff等人[388]提高了Frisvad方法的准确性。无论采用哪种技术,这三个向量都用于创建旋转矩阵:
该矩阵将向量\(\textbf{r}\)转换为x 轴,将\(\textbf{s}\)转换为y轴,将\(\textbf{t}\)转换为z轴。因此,围绕归一化向量\(\textbf{r}\)旋转\(\alpha\)弧度的最终变换是:
换句话说,这意味着首先我们变换使得\(\textbf{r}\)是x轴(使用\({\textbf{M}}\)),然后我们围绕这个x轴旋转\(\alpha\)个弧度(使用\({\textbf{R}}_x(\alpha)\)),然后我们使用\({\textbf{M}}\)的逆,在这种情况下是\({\textbf{M}}^{T}\),因为\({\textbf{M}}\)是正交的。
Goldman[550]提出了另一种绕任意标准化轴\(\textbf{r}\)旋转\(\phi\)弧度的方法。在这里,我们简单介绍一下他的变换:
在4.3.2节中,我们提出了另一种解决这个问题的方法,使用四元数。在该部分中还有针对相关问题的更有效算法,例如从一个向量到另一个向量的旋转。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号