如何用WebGPU流畅渲染百万级2D物体?
 大家好~本文使用WebGPU和光线追踪算法,从0开始实现和逐步优化Demo,展示了从渲染500个2D物体都吃力到流畅渲染4百万个2D物体的优化过程和思路
大家好~本文使用WebGPU和光线追踪算法,从0开始实现和逐步优化Demo,展示了从渲染500个2D物体都吃力到流畅渲染4百万个2D物体的优化过程和思路
大家好~本文使用WebGPU和光线追踪算法,从0开始实现和逐步优化Demo,展示了从渲染500个2D物体都吃力到流畅渲染4百万个2D物体的优化过程和思路
完整代码在这里
需求
我们对Demo提出下面的要求:
- 渲染1百万个以上的2D物体时达到30FPS以上
暂时只渲染一种2D物体:圆环 - 内存占用小
- 剔除被遮挡的物体
- 放大物体时无锯齿,达到矢量渲染的效果
成果
我们最终能够流畅渲染4百万个圆环
性能指标:
- 画布大小为:width=512, height=512
- 45 FPS左右,也就是每帧花费21毫秒
- 内存占用211MB
硬件:
- Win10操作系统
- Canary浏览器
- RTX2060s显卡
下面让我们从0开始,介绍实现和优化的步骤:
1、选择渲染的算法
思考如何实现与渲染相关的需求
现在,我们来回顾下与渲染相关的需求,从而确定渲染算法:
放大物体时无锯齿,达到矢量渲染的效果
要实现该需求,可以用参数化的方法来表示物体,如用圆心坐标、半径、圆环宽度 来表示一个圆环;
然后可以根据下面的公式判断一个点是否在圆环上:
let distanceSquare = Math.pow((点-圆心坐标), 2)
let isPointInRing = distanceSquare >= Math.pow(半径, 2) && distanceSquare <= Math.pow(半径 + 圆环宽度, 2)
因为圆环是2D的,是直接绘制在屏幕上的,所以这里的一个点就是屏幕上的一个像素
从上面的分析可知,通过“如果一个像素在圆环上则渲染”的逻辑,就可以实现需求
剔除被遮挡的物体
要实现该需求,首先圆环加上“层”的数据;
然后遍历所有圆环,判断像素在哪些圆环上;
最后取出最大“层”的圆环,将它的颜色作为像素的颜色
选择渲染的算法
有两种渲染算法可选择:光栅化渲染、光追渲染
根据我们之前对渲染需求的思考,我们应该选择光追渲染作为渲染算法
典型的光追渲染会依次执行下面两个pass:
1、光追pass
从相机向每个像素发射射线,经过多次射线弹射,计算每个像素的颜色
2、屏幕pass
将屏幕光栅化,渲染每个像素的颜色
其中光追pass是在CS(计算着色器)中进行,屏幕pass是在VS(顶点着色器)和FS(片元着色器)中进行
因为这里是2D物体,所以需要对光追算法做一些简化:
射线不需要弹射,因为不需要计算间接光照;
因为物体直接就在屏幕上,所以不需要计算射线与物体相交,而是按照参数化公式计算像素是否在2D物体上
2、实现内存需求
现在来考虑如何实现“内存占用小”的需求
这里只考虑CPU端内存,它主要存放了场景数据,包括圆环的transform、geometry、material的数据
我们使用ECS架构,将物体建模为gameObject+components
这里的components具体就是transform、geometry、material这些组件
按照Data Oriented的思想,每种组件就是一个ArrayBuffer,连续地存放组件数据(如transform buffer连续地存放圆环的localPositionX, localPostionY, layer(层)数据)
component为对应buffer中数据的索引
通过ECS的设计,我们就将场景数据都放在buffer中了。在初始化时,只根据最大的组件数量,创建一次对应的组件buffer。这样就实现了内存占用最小的目标
3、渲染1个圆环
现在来渲染出一个圆环,也不考虑剔除
我们依次实现下面两个pass:
光追pass
我们需要传入下面的场景数据到CS中,CS中对应的数据结构如下:
struct AccelerationStructure {
worldMin : vec2<f32>,
worldMax : vec2<f32>,
instanceIndex: f32,
pad_0: f32,
pad_1: f32,
pad_2: f32,
}
struct Instance {
geometryIndex: f32,
materialIndex: f32,
localPosition: vec2<f32>,
}
struct Geometry {
c: vec2<f32>,
w: f32,
r: f32,
}
struct Material {
color: vec3<f32>,
pad_0: f32,
}
struct AccelerationStructures {
accelerationStructures : array<AccelerationStructure>,
}
struct Instances {
instances : array<Instance>,
}
struct Geometrys {
geometrys : array<Geometry>,
}
struct Materials {
materials : array<Material>,
}
struct Pixels {
pixels : array<vec4<f32>>
}
struct ScreenDimension {
resolution : vec2<f32>
}
@binding(0) @group(0) var<storage, read> sceneAccelerationStructure : AccelerationStructures;
@binding(1) @group(0) var<storage, read> sceneInstanceData : Instances;
@binding(2) @group(0) var<storage, read> sceneGeometryData : Geometrys;
@binding(3) @group(0) var<storage, read> sceneMaterialData : Materials;
@binding(4) @group(0) var<storage, read_write> pixelBuffer : Pixels;
@binding(5) @group(0) var<uniform> screenDimension : ScreenDimension;
struct中的pad用于对齐
sceneAccelerationStructure包含圆环的包围盒数据,作为加速相交检测的加速结构。其中worldMin、worldMax为世界坐标系中的min、max
sceneInstanceData、sceneGeometryData、sceneMaterialData为场景中所有的组件数据(sceneInstanceData为Transform数据)
instanceIndex, geometryIndex, materialIndex为对应组件数据的索引
pixelBuffer是光追pass的输出,用来存放像素颜色
screenDimension存放画布的width、height
这里为了简单,没有传相机数据
在执行CS时,启动画布的width*height个work groups,从而让每个像素对应一个work group,并行执行每个像素
相关代码为:
const passEncoder = commandEncoder.beginComputePass();
...
passEncoder.dispatchWorkgroups(width, height);
下面我们来看下CS中计算每个像素颜色的相关代码:
struct RayPayload {
radiance: vec3<f32>,
}
struct Ray {
target: vec2<f32>,
}
struct RingIntersect {
isHit: bool,
instanceIndex: f32,
}
fn _isIntersectWithAABB2D(ray: Ray, aabb: AABB2D) -> bool {
var target = ray.target;
var min = aabb.min;
var max = aabb.max;
return target.x > min.x && target.x < max.x && target.y > min.y && target.y < max.y;
}
fn _isIntersectWithRing(ray: Ray, geometry: Geometry) -> bool {
var target = ray.target;
var c = geometry.c;
var w = geometry.w;
var r = geometry.r;
var distanceSquare = pow(target.x - c.x, 2.0) + pow(target.y - c.y, 2.0);
return distanceSquare >= pow(r, 2) && distanceSquare <= pow(r + w, 2);
}
fn _intersectScene(ray: Ray) -> RingIntersect {
var intersectResult: RingIntersect;
intersectResult.isHit = false;
var as: AccelerationStructure;
//遍历所有的圆环,判断点在哪个圆环上
for (var i: u32 = 0u; i < arrayLength(& sceneAccelerationStructure.accelerationStructures); i = i + 1u) {
as = sceneAccelerationStructure.accelerationStructures[i];
if (_isIntersectWithAABB2D(ray, AABB2D(as.worldMin, as.worldMax))) {
var instance: Instance = sceneInstanceData.instances[u32(as.instanceIndex)];
var geometryIndex = u32(instance.geometryIndex);
var geometry: Geometry = sceneGeometryData.geometrys[geometryIndex];
if (_isIntersectWithRing(ray, geometry)) {
//这里没考虑剔除被遮挡的物体,只是直接取与第一个相交圆环的结果
intersectResult.isHit = true;
intersectResult.instanceIndex = as.instanceIndex;
break;
}
}
}
return intersectResult;
}
//这里使用了WGSL的pointer type,相当于GLSL的inout,实现对payload的引用修改
fn _handleRayHit(payload: ptr<function,RayPayload>, ray: Ray, intersectResult: RingIntersect)->bool {
var instance: Instance = sceneInstanceData.instances[u32(intersectResult.instanceIndex)];
var materialIndex = u32(instance.materialIndex);
var material:Material = sceneMaterialData.materials[materialIndex];
(*payload).radiance = material.color;
return false;
}
fn _handleRayMiss(payload: ptr<function,RayPayload>)->bool {
(*payload).radiance = vec3<f32>(0.0, 0.0, 0.0);
return false;
}
fn _traceRay(ray: Ray, payload: ptr<function,RayPayload>)->bool {
var intersectResult: RingIntersect = _intersectScene(ray);
if (intersectResult.isHit) {
return _handleRayHit(payload, ray, intersectResult);
}
return _handleRayMiss(payload);
}
@compute @workgroup_size(1, 1, 1)
fn main(@builtin(global_invocation_id) GlobalInvocationID: vec3<u32>) {
var ipos = vec2<u32>(GlobalInvocationID.x, GlobalInvocationID.y);
var resolution = vec2<f32>(screenDimension.resolution);
var pixelColor = vec3<f32>(0.0, 0.0, 0.0);
//取像素中心为像素坐标
var sampledPixel = vec2<f32>(f32(ipos.x) + 0.5, f32(ipos.y) + 0.5);
//获得屏幕坐标系中的像素坐标
var uv = (sampledPixel / resolution) * 2.0 - 1.0;
//像素坐标就是点坐标(因为没有使用相机,所以它就相当于在世界坐标系中)
var target = uv;
/* 如果使用了相机的话,需要将其转换到世界坐标系中:
var target = 相机的视图矩阵的逆矩阵 * 相机的投影矩阵的逆矩阵 * uv;
*/
var payload: RayPayload;
payload.radiance = vec3<f32>(0.0, 0.0, 0.0);
var _isContinueBounce = _traceRay(Ray(target.xy), & payload);
pixelColor = payload.radiance;
var pixelIndex = ipos.y * u32(resolution.x) + ipos.x;
pixelBuffer.pixels[pixelIndex] = vec4<f32>(pixelColor, 1.0);
}
看代码应该就能理解了吧,就不说明了
屏幕pass
在VS中,使用一个大的三角形包含整个屏幕,代码为:
struct VertexOutput {
@builtin(position) Position: vec4 < f32 >,
@location(0) uv: vec2 < f32 >,
}
@vertex
fn main(
@builtin(vertex_index) VertexIndex: u32
) -> VertexOutput {
var output: VertexOutput;
output.uv = vec2<f32>(f32((VertexIndex << 1) & 2), f32(VertexIndex & 2));
output.Position = vec4<f32>(output.uv * 2.0 - 1.0, 0.0, 1.0);
return output;
}
在FS中,读取光追pass输出的像素颜色,代码为:
struct Pixels {
pixels: array<vec4<f32>>
}
struct ScreenDimension {
resolution: vec2<f32>
}
@binding(0) @group(0) var<storage, read_write > pixelBuffer : Pixels;
@binding(1) @group(0) var<uniform>screenDimension : ScreenDimension;
@fragment
fn main(
@location(0) uv: vec2<f32>
) -> @location(0) vec4 < f32 > {
var resolution = vec2<f32>(screenDimension.resolution);
var bufferCoord = vec2<u32>(floor(uv * resolution));
var pixelIndex = bufferCoord.y * u32(resolution.x) + bufferCoord.x;
var pixelColor = pixelBuffer.pixels[pixelIndex].rgb;
return vec4<f32>(pixelColor, 1.0);
}
4、测试渲染极限
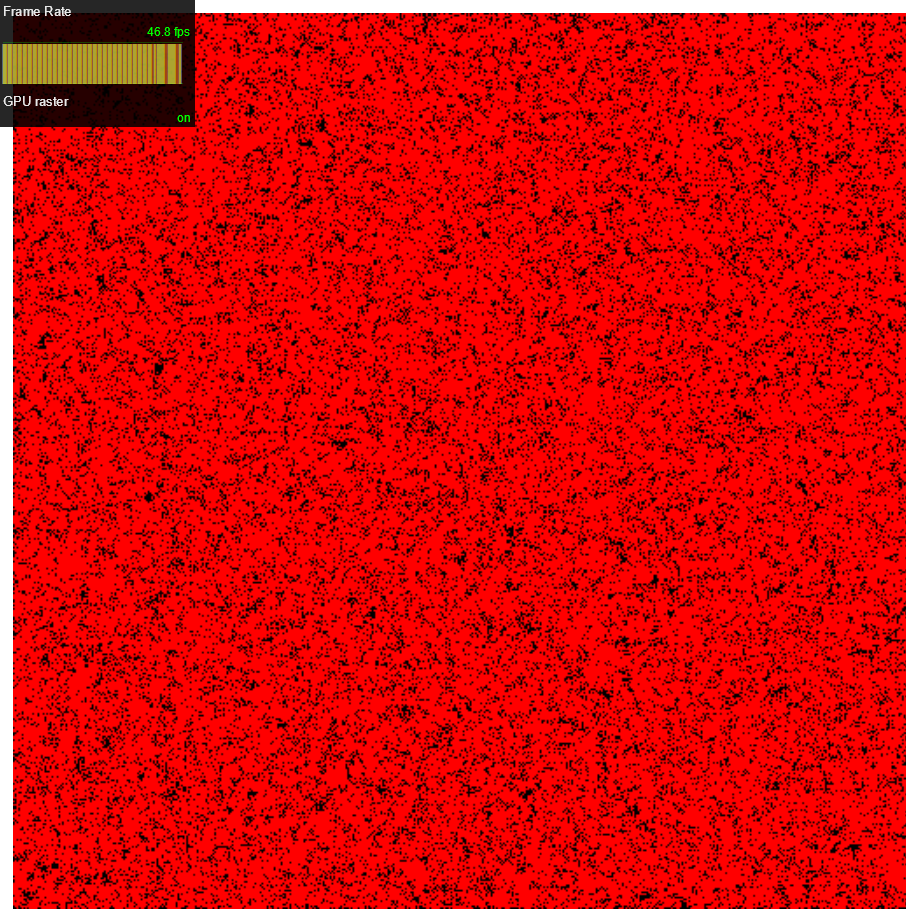
现在我们来渲染500个圆环,测试下FPS
渲染结果如下图所示:

发现性能问题:现在FPS为45,低于60!
我们来分析下CS中的性能热点:
首先在粗粒度上确定热点范围
我们将_intersectScene函数中的for循环注释掉,再次运行Demo,FPS提升为60
这说明_intersectScene的for循环这块是性能热点
我们来分析这块代码:
现在每次遍历都会执行arrayLength函数,而它的性能较差。因此将其提出来只执行一次
代码修改为:
var length = arrayLength(&sceneAccelerationStructure.accelerationStructures);
for (var i : u32 = 0u; i < length; i = i + 1u) {
取消for循环的注释,再次运行Demo,FPS提升为60
现在for循环会遍历每个圆环,应该要引入BVH来减少遍历次数。不过因为BVH实现起来比较复杂,所以不忙引入,而是先考虑容易实现的优化
5、尝试设置workgroup_size
目前work group的size设为(1,1,1),没有启用局部单位
我们介绍下work group和它的局部单位的概念:
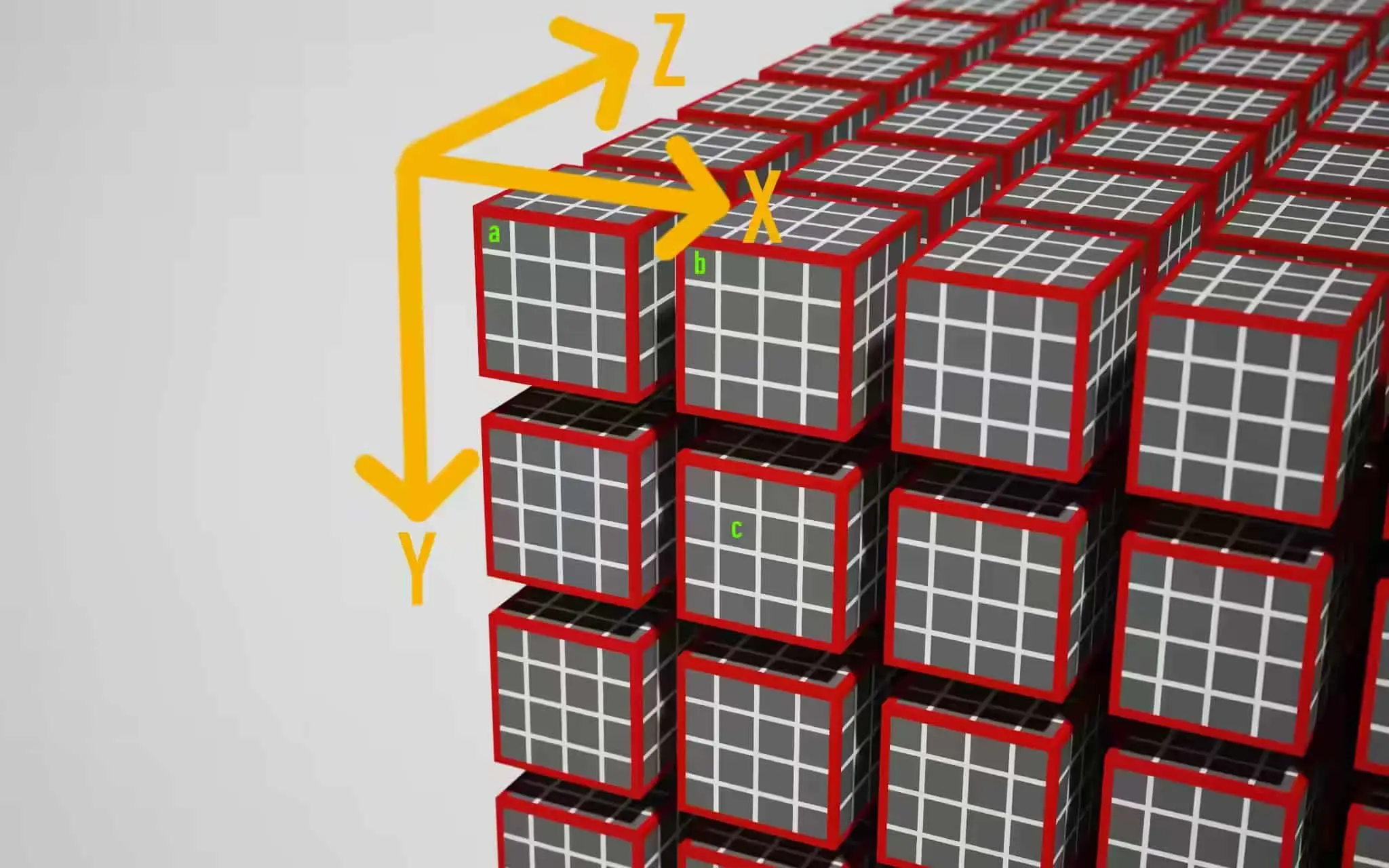
如上图所示,一个红色的立方体表示一个work group(通过"passEncoder.dispatchWorkgroups(x1,y1,z1)"来指定启动(x1乘以y1乘以z1)个work group); 红色立方体里面又包含多个小的立方体,每个表示一个局部单位(通过"@workgroup_size(x2,y2,z2)"来指定启动一个work group中(x2乘以y2乘以z2)个局部单位)
那么总共就有(x1乘以y1乘以z1乘以x2乘以y2乘以z2)次着色器调用,它们都是并行执行的
既然都是并行执行,那么只需要用work group就好了,为什么要用到work group内的局部单位呢?
这是因为下面两个原因:
1、提供共享变量
同一个work group的局部单位之间可以共享变量
如实现图像降噪时,需要获得一个像素周围3*3范围的像素来一起计算,它们需要共享一些数据。因此可指定为@workgroup_size(3,3,1)
2、提高性能
因为GPU中有多个计算单位,每个计算单位可以看成是一个work group;每个计算单位中一般可以同时执行8乘以8=64个线程。
如果将work group size设为1,则只使用了计算单位中的1个线程而不是64个线程
所以,一般将work group size设为64(如(64,1,1)或者(8,8,1)),则可以使用计算单位的64个线程,而减少了所需的计算单位数量(变为原来的1/64),这样就提高了性能
这也是为什么我们要使用WebGPU而不是WebGL来实现本Demo:因为只有WebGPU才有CS,而CS可以充分利用计算单位中的线程,提高性能
启用局部单位
现在我们将work group数量减少为原来的1/64:
let workgroup_size = {
width: 8,
height: 8
}
const passEncoder = commandEncoder.beginComputePass();
...
passEncoder.dispatchWorkgroups(Math.ceil(width / workgroup_size.width), Math.ceil(height / workgroup_size.height));
同时将work group的size设为(8,8,1):
@compute @workgroup_size(8, 8, 1)
但是运行Demo后,发现FPS不仅没有增加,反而更低了!
这是为什么呢?
通过学习下面的资料:
Optimizing GPU occupancy and resource usage with large thread groups
我们知道了一个计算单位中只有64KB的内存用于存储(我们只用到了64KB的VGPRs (Vector General-Purpose Registers)),并且由于一个计算单位会并行执行两个线程组,所以每个线程组只有32KB的内存大小。
然而在_intersectScene的for循环中遍历了所有的圆环。这意味着会将所有圆环的数据都加载到计算单位的内存中,从而超过了32KB的大小!
这导致了计算单位只能使用1个线程组,并且该线程组只能使用1个而不是所有的线程!
所以不仅相当于没启用局部单位,反而可能因为试图启用局部单位而造成的同步开销,导致FPS不升反降!
结论
综上分析,我们需要引入BVH,大幅减少for循环中需要遍历的数据,使其小于32KB,从而能够将其载入到计算单位的内存中;
然后我们再启用8*8的局部单位!
6、实现BVH
BVH是一个用于空间划分的树,相关介绍可参考:
场景管理方法之BVH介绍
我们需要在CPU端构造BVH树,将其传入到CS;然后在CS->_intersectScene函数中遍历BVH
6.1、实现构造BVH
构造BVH树
我们在CPU端使用最简单暴力的Middle方法构造BVH树,步骤如下:
1、计算所有圆环的包围盒AABB
2、构造根节点,以所有AABB形成的整体AABB为该节点的包围盒
3、从x轴方向,按照AABB的中心点位置排序所有的AABB
4、以中间的AABB为分界线分割,形成两个子节点,每个子节点以其包含的所有AABB形成的整体AABB为该子节点的包围盒
5、递归地构造这两个子节点,并且交替地从y轴方向开始(即x轴->y轴->x轴。。。。。。交替)排序该节点包含的所有AABB和分割。。。。。。直到节点包含的AABB个数<=5或达到最大深度时结束递归
构造加速结构
因为CS中只能用数组,所以需要将BVH树拍平成数组,作为加速结构传送到CS
我们将加速结构设计为两层:TopLevel和BottomLevel
BottomLevel的数据类型如下:
type worldMinX = number
type worldMinY = number
type worldMaxX = number
type worldMaxY = number
type instanceIndex = number
type bottomLevel = Array<[worldMinX, worldMinY, worldMaxX, worldMaxY, instanceIndex]>
BottomLevel用来保存所有圆环对应的包围盒、instanceIndex
TopLevel的数据类型如下:
type wholeWorldMinX = number
type wholeWorldMinY = number
type wholeWorldMaxX = number
type wholeWorldMaxY = number
type leafInstanceOffset = number
type leafInstanceCount = number
type child1Index = number
type child2Index = number
type topLevel = Array<[
wholeWorldMinX, wholeWorldMinY, wholeWorldMaxX, wholeWorldMaxY,
leafInstanceOffset,
leafInstanceCount,
child1Index,
child2Index
]>
TopLevel用来保存BVH节点的包围盒、节点包含的AABB在BottomLevel数组中的索引(如果该节点不是叶节点,则leafInstanceCount=0)、子节点在topLevel数组中的索引
然后将加速结构传到CS中,CS中对应数据结构如下:
struct TopLevel {
worldMin : vec2<f32>,
worldMax : vec2<f32>,
leafInstanceOffset: f32,
leafInstanceCount: f32,
child1Index: f32,
child2Index: f32
}
struct BottomLevel {
worldMin : vec2<f32>,
worldMax : vec2<f32>,
instanceIndex: f32,
pad_0: f32,
pad_1: f32,
pad_2: f32,
}
struct TopLevels {
topLevels : array<TopLevel>,
}
struct BottomLevels {
bottomLevels : array<BottomLevel>,
}
@binding(0) @group(0) var<storage> topLevel : TopLevels;
@binding(1) @group(0) var<storage> bottomLevel : BottomLevels;
6.2、CPU端实现遍历BVH
为了方便测试,我们先在CPU端实现遍历BVH;解决所有bug后,再移植到CS中
可以分别用递归和迭代来实现
考虑到WGSL不支持递归函数,所以我们只用迭代来实现
相关代码如下:
type traverseResult = {
isHit: boolean,
instanceIndex: instanceIndex | null
}
let _isPointIntersectWithAABB = (
point,
wholeWorldMinX, wholeWorldMinY, wholeWorldMaxX, wholeWorldMaxY,
) => {
return point[0] > wholeWorldMinX && point[0] < wholeWorldMaxX && point[1] > wholeWorldMinY && point[1] < wholeWorldMaxY
}
let _isPointIntersectWithTopLevelNode = (point, node: topLevelNodeData) => {
let [
wholeWorldMinX, wholeWorldMinY, wholeWorldMaxX, wholeWorldMaxY,
leafInstanceOffset,
leafInstanceCount,
child1Index,
child2Index
] = node
return _isPointIntersectWithAABB(
point,
wholeWorldMinX, wholeWorldMinY, wholeWorldMaxX, wholeWorldMaxY,
)
}
let _isLeafNode = (node: topLevelNodeData) => {
let leafInstanceCountOffset = 5
return node[leafInstanceCountOffset] !== 0
}
let _handleIntersectWithLeafNode = (intersectResult, isIntersectWithInstance, point, node: topLevelNodeData, bottomLevelArr: bottomLevelArr) => {
let [
wholeWorldMinX, wholeWorldMinY, wholeWorldMaxX, wholeWorldMaxY,
leafInstanceOffset,
leafInstanceCount,
child1Index,
child2Index
] = node
while (leafInstanceCount > 0) {
let [worldMinX, worldMinY, worldMaxX, worldMaxY, instanceIndex] = bottomLevelArr[leafInstanceOffset]
if (_isPointIntersectWithAABB(
point,
worldMinX, worldMinY, worldMaxX, worldMaxY
)) {
if (isIntersectWithInstance(point, instanceIndex)) {
intersectResult.isHit = true
intersectResult.instanceIndex = instanceIndex
break;
}
}
leafInstanceCount -= 1
leafInstanceOffset += 1
}
}
let _hasChild = (node, childIndexOffset) => {
return node[childIndexOffset] !== 0
}
export let traverse = (isIntersectWithInstance, point, topLevelArr: topLevelArr, bottomLevelArr: bottomLevelArr): traverseResult => {
let rootNode = topLevelArr[0]
let child1IndexOffset = 6
let child2IndexOffset = 7
let stackContainer = [rootNode]
let stackSize = 1
let intersectResult = {
isHit: false,
instanceIndex: null
}
while (stackSize > 0) {
let currentNode = stackContainer[stackSize - 1]
stackSize -= 1
if (_isPointIntersectWithTopLevelNode(point, currentNode)) {
if (_isLeafNode(currentNode)) {
_handleIntersectWithLeafNode(intersectResult, isIntersectWithInstance, point, currentNode, bottomLevelArr)
if (intersectResult.isHit) {
break
}
}
else {
if (_hasChild(currentNode, child1IndexOffset)) {
stackContainer[stackSize] = topLevelArr[currentNode[child1IndexOffset]]
stackSize += 1
}
if (_hasChild(currentNode, child2IndexOffset)) {
stackContainer[stackSize] = topLevelArr[currentNode[child2IndexOffset]]
stackSize += 1
}
}
}
}
return intersectResult
}
这里用了栈(stackContainer)来保存需要遍历的节点
本来我们可以直接通过stackContainer.push方法将节点push到栈中,但考虑到WGSL的数组没有push操作,所以这里我们就增加了stackSize这个数据,从而能够通过"stackContainer[stackSize] = 节点"来代替"stackContainer.push(节点)"
6.3、GPU端实现遍历BVH
CPU端测试通过后,我们将其移植到CS中
这里值得注意的是因为WGSL创建数组时必须定义大小,所以栈的大小必须预先确定且为常数
栈的大小其实就是BVH树的最大深度,我们可以先暂时指定为20
相关代码如下:
fn _intersectScene(ray: Ray)->RingIntersect {
const MAX_DEPTH = 20;
var stackContainer:array<TopLevel, MAX_DEPTH>;
...
}
7、测试渲染极限
现在我们将圆环数量增加200倍,渲染500*200=10万个圆环,测试下FPS
我们将圆环的半径和圆环宽度缩小为1/10,这样方便显示
渲染结果如下图所示:
FPS没有变化
结论
通过引入BVH,渲染性能提高了200倍
8、设置workgroup_size
因为引入了BVH,需要遍历的节点数大大减少了,所以减少了显存占用
现在再次启用局部单位:
我们将work group减少为原来的1/64,将work group的size设为(8,8,1):
运行Demo后,发现FPS变为60了
理论上可以提高64倍的渲染速度
所以我们将圆环数量增加40倍,渲染10万*40=4百万个圆环,测试下FPS
结果FPS跟之前10万个时一样
结论
通过启用局部单位,渲染性能提高了40倍
9、测试内存占用
通过Chrome dev tool->Memory->Take heap snapshot,可以看到包含4百万个圆环的场景在CPU端只占用了211MB左右的内存,说明内存占用确实小
10、使用LBVH算法来构造BVH
现在当圆环数量为4百万个时,CPU端构造BVH需要花费100秒以上的时间!
因此,我们保持“构造加速结构”的代码不变,修改“构造BVH树”的算法为LBVH算法
它的步骤如下:
1、计算所有圆环的包围盒AABB
2、构造根节点,以所有AABB形成的AABB为该节点的包围盒
3、根据根节点的包围盒,在x、y轴方向上将其1024等分,根据AABB的中心点在哪个区域而计算出AABB在x、y轴方向上的格子坐标
4、将格子坐标转换为Morton Code
5、根据Morton Code将所有的AABB排序
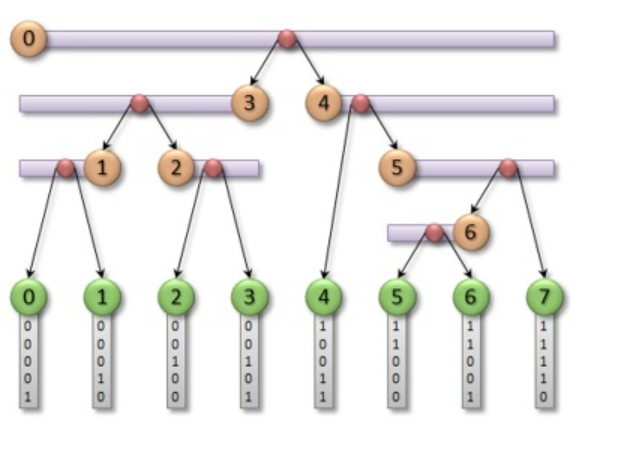
6、对于该有序Morton Code数组,我们利用二分查找出第一个不同的bit位(也即是从0变为1的index),此时我们即可将最高位为0的所有BVs归入此node(此时是root节点)的左子树,最高位为1的所有BVs归入右子树;同理,我们对左右子树按照下一个bit位来递归的处理,直到递归的处理完全部bit位,LBVH即可建立完毕
最后一步如下图所示:
结论
通过改为LBVH算法,构造时间降低为10秒左右,性能提高了10倍
之所以LBVH算法更快,是因为只排序了一次!
11、实现剔除
之前分析过剔除的实现思路:
首先圆环加上“层”的数据;
然后遍历所有圆环,判断像素在哪些圆环上;
最后取出最大“层”的圆环,将它的颜色作为像素的颜色
因此,可以在圆环的transform组件数据中增加layer数据(从1开始的正整数),用来表示“层”;
然后在构造加速结构BottomLevel时,读取transform组件中的layer数据,将其保存到BottomLevel数据中;
最后修改CS代码,在遍历BVH->检测到像素在圆环上时比较layer,并且不再停止遍历,而是继续遍历栈的其它节点;在遍历栈的其它节点时,如果找到了像素在其上的圆环,也不再停止
实现剔除后,运行Demo渲染1百万个圆环时FPS都才15(之前是4百万个 45 FPS),渲染性能估计降低了10倍
12、改进遍历BVH
我们从下面几个方面对剔除进行优化
traverse order优化
现在如果找到了像素在其上的圆环,会继续遍历其它节点。
我们需要减少遍历的节点数量
我们可以在构造BVH树时,为每个节点增加maxLayer数据,它为该节点包含的所有的圆环中最大的层;
然后在遍历BVH时:
检测到像素在圆环上时,将圆环的layer记录到相交结果intersectResult中;
在遍历栈中的节点的while循环中,如果该节点的maxLayer <= intersectResult.layer,则说明该节点包含的所有圆环都被遮挡了,直接continue,跳过;
另外,在遍历叶节点的所有圆环时,如果像素所在的圆环的layer==该节点的maxLayer,则说明已经找到了叶节点包含的所有圆环中的最大层的圆环,则break,停止搜索该叶节点包含的其它圆环。
通过上面的优化,可以大幅降低遍历的节点数量
合并数据
因为BVH树的节点需要保存maxLayer数据,而这个数据实际上是保存在TopLevel中的,对应到CS中的数据结构就是:
struct TopLevel {
worldMin : vec2<f32>,
worldMax : vec2<f32>,
leafInstanceOffset: f32,
leafInstanceCount: f32,
child1Index: f32,
child2Index: f32
maxLayer: f32,
pad_0: f32,
pad_1: f32,
pad_2: f32,
}
我们可以看到,因为增加了maxLayer,需要增加3个pad数据来对齐,这样浪费了显存
而占用尽可能少的显存是非常重要的,因为经过之前的分析,我们知道一个计算单位只有32KB的显存可用,超过的话就会导致启用局部单位失效!
仔细观察后,我们发现leafInstanceCount和maxLayer只需要占用<32位的字节数
我们可以让这两个数据各占16位,其中leafInstanceCount在高位,maxLayer在低位;然后将其合成一个32位f32
从而TopLevel修改为:
struct TopLevel {
worldMin : vec2<f32>,
worldMax : vec2<f32>,
leafInstanceOffset: f32,
leafInstanceCountAndMaxLayer: f32,
child1Index: f32,
child2Index: f32
}
这样就消除了pad数据,减少了显存占用
但是当渲染的圆环数量超过1百万个时,会出现“从leafInstanceCountAndMaxLayer中取出的maxLayer为0(应该>=1)”的bug!
这是因为leafInstanceCount(叶节点的圆环个数)过大,占用了超出了16位的字节数,从而影响到maxLayer的值!
所以我们重新分配,让leafInstanceCount占24位,maxLayer占8位,则解决了bug
注:理论上16位的leafInstanceCount可以最大为65535,但实际上我发现当leafInstanceCount>1000时,就出现了超过16位的情况!我估计是WGLSL可能占用了f32类型的数据的最高几位,导致leafInstanceCount实际可用位数<16位
13、测试渲染极限
现在我们将圆环数量恢复为4百万个圆环,FPS又恢复为45左右
当我们尝试渲染5百万个圆环时,遇到了“我们BottomLevel Buffer数据超出了Storage Buffer的最大限制:128MB”的问题
关于这个限制,WebGPU官方有相关的讨论issue:
Limit for the maximum buffer size
绕过该限制的可能方案是将其拆成多个Storage Buffer
结论
通过traverse order优化,渲染性能提高了10倍左右
当我们尝试渲染5百万个圆环时,遇到了超出Storage Buffer最大大小的限制
总结
感谢大家的学习~
在本文中,我们先提出了需求;然后按照需求来设计和选择算法;然后实现最简单的版本;接着不断优化,直到达到Storage Buffer的最大大小限制为止
我们的优化的成果为:
- 通过引入BVH,渲染性能提高了200倍
- 通过启用局部单位,渲染性能提高了40倍
- 通过改为LBVH算法,构造BVH的性能提高了10倍
- 通过traverse order优化,使得剔除的性能提高了10倍左右
目前我们最多渲染4百万个圆环,因为再多就会超出Storage Buffer最大大小的限制
后续的改进方向
后面我们希望能够渲染千万级2D物体,可以从下面的方向改进:
- 将加速结构拆成多个Storage Buffer
- 优化构造BVH,使叶节点包含的圆环数量尽量少,且节点的包围盒尽量不重叠,这样才能提高遍历BVH的性能
可考虑使用HLBVH算法 - 优化遍历BVH:考虑并行遍历BVH、无栈的遍历
参考Ray Tracing学习之Traversal
参考资料
OpenGL4.3 新特性: 计算着色器 Compute Shader
Bad preformance of simple ray trace compute shader
Optimizing GPU occupancy and resource usage with large thread groups
我所理解的DirectX Ray Tracing
并行构建BVH
Build LBVH on GPUs
Ray Tracing学习之Traversal
光线求交加速算法:边界体积层次结构(Bounding Volume Hierarchies)3-LBVH(Linear Bounding Volume Hierarchies)
WebGPU 计算管线、计算着色器(通用计算)入门案例:2D 物理模拟
欢迎浏览下一篇博文:如何用WebGPU流畅渲染千万级2D物体:基于光追管线
感谢您的阅读~
扫码加入我的QQ群:

扫码加入免费知识星球-YYC的Web3D旅程:


 浙公网安备 33010602011771号
浙公网安备 33010602011771号