图及最短路算法初步
图及最短路算法初步
什么是图?
图可以表示点与点之间的关系,它是由点集和边集构成。
生活中图的例子
高速公路连接全国各个城市,全国高速公路网可以简化成一个图模型:
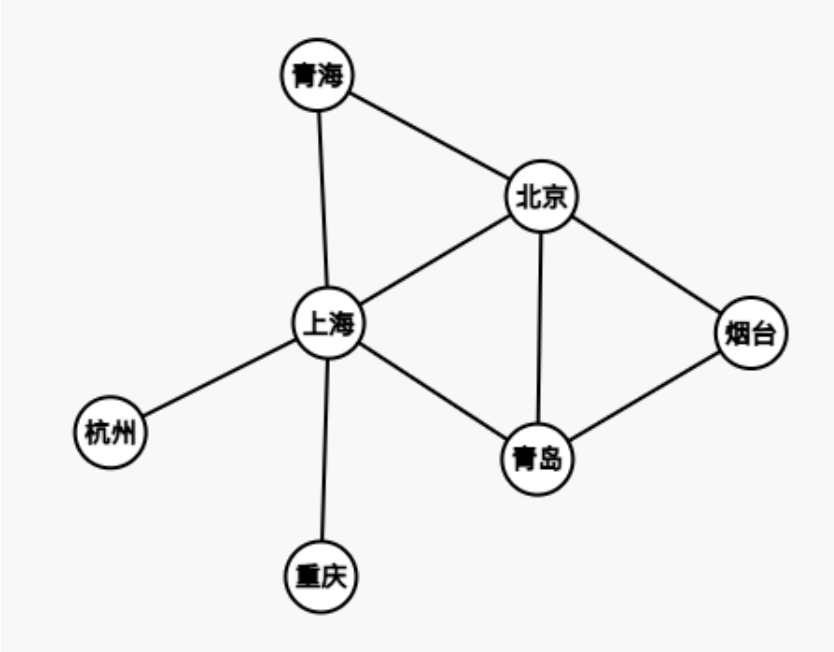
这就是一个图,它描述了两个城市之间是否有高速公路(边).
图的一些基本概念
无向图:边没有方向的图称为无向图,刚刚简化之后的全国高速公路网就是一个无向图。
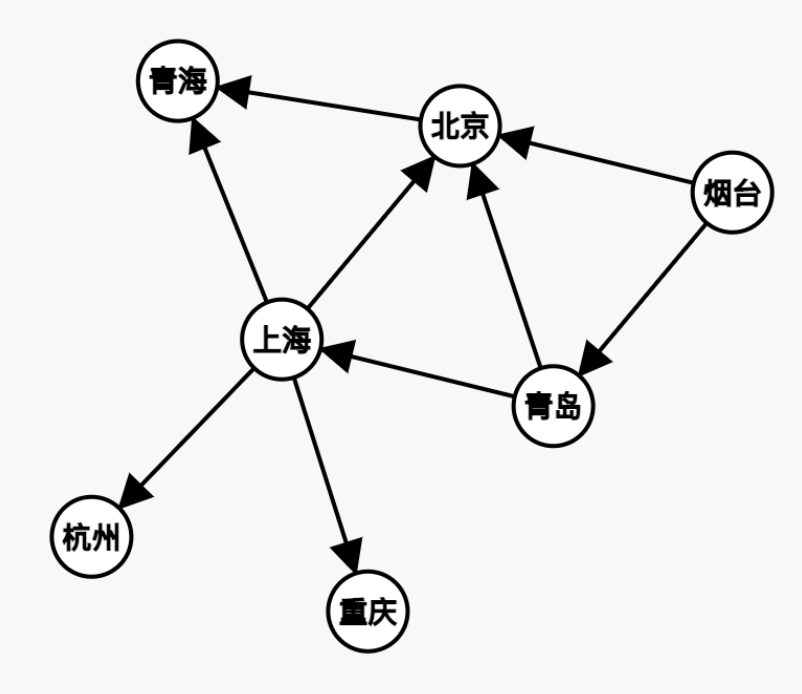
有向图:与无向图相反,边有方向的图成为有向图。
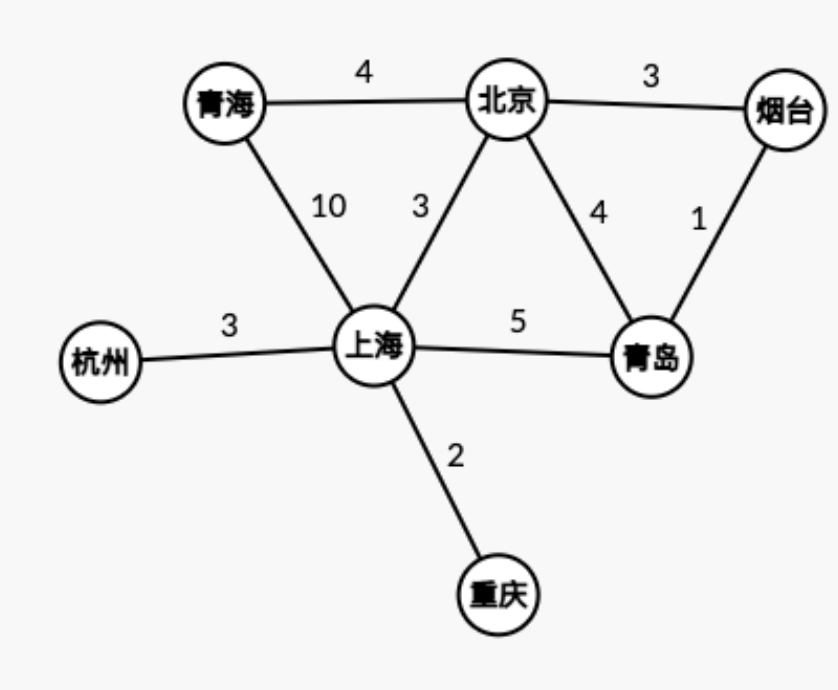
带权图:边有权值的图就是带权图,例如刚刚的图,描述从一个城市到另一个城市所需要的时间,那么边的权值就代表从边的一个点到另一个点所需要的时间。
无权图:边没有权值的图。
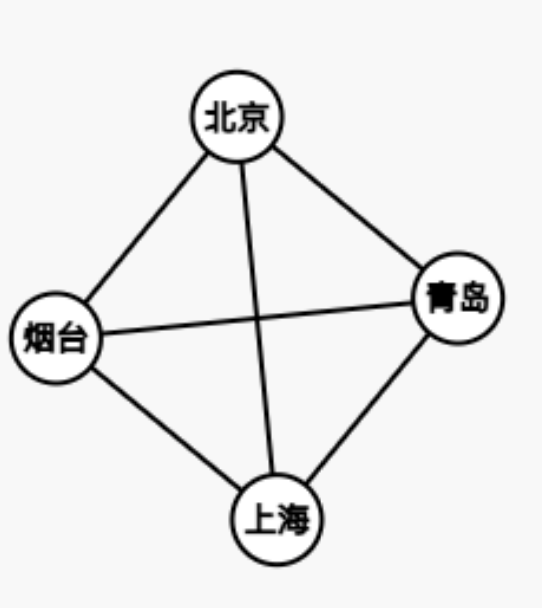
完全图:图中的任意一个点可以通过一个边到达任意一个其他点。
环:见图。
负环,又叫负权回路,负权环,指的是一个图中存在一个环,里面包含的边的边权总和<0。

图的存储
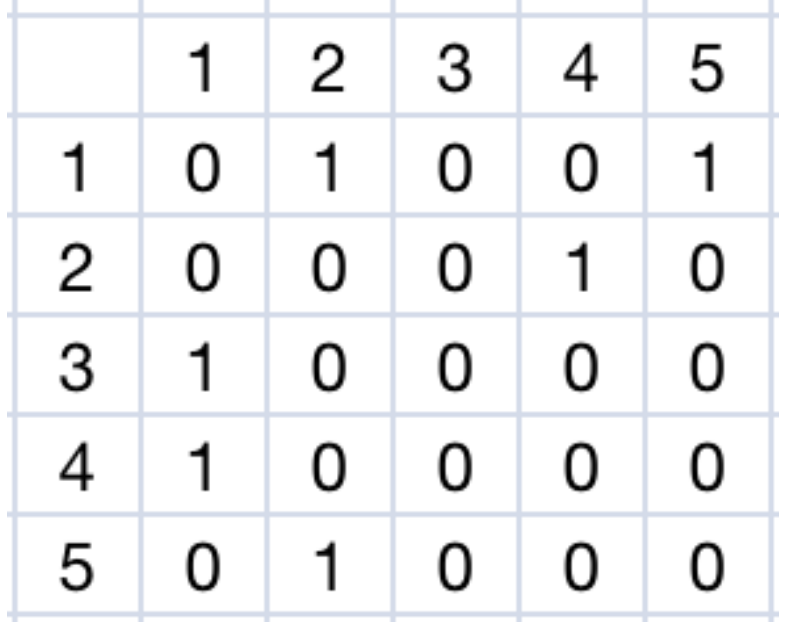
邻接矩阵
邻接矩阵是最简单的一种存储图的方式,它创建了一个二位数组e[Maxn][Maxn],那么想要表示两个点\(u,v\)之间有一个边就表示为e[u][v] = e[v][u] = 1,这里1仅仅表示有边相连,如果这个边有边权\(w\)可以表示为:e[u][v] = e[v][u] = w.
此外邻接矩阵也可以表示有向图:若\(u,v\)之间只有从\(u\)指向\(v\)的边而没有从\(v\)指向\(u\)的边,那么e[u][v] = w即可。
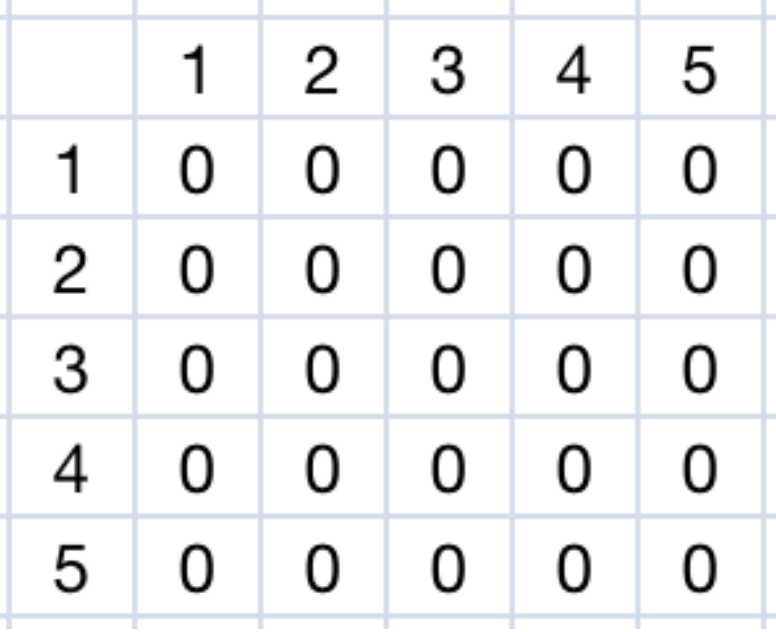
将有向边\((1,2)\),\((1,5)\),\((2,4)\),\((3,1)\),\((4,1)\),\((5,2)\)添加到邻接矩阵中:
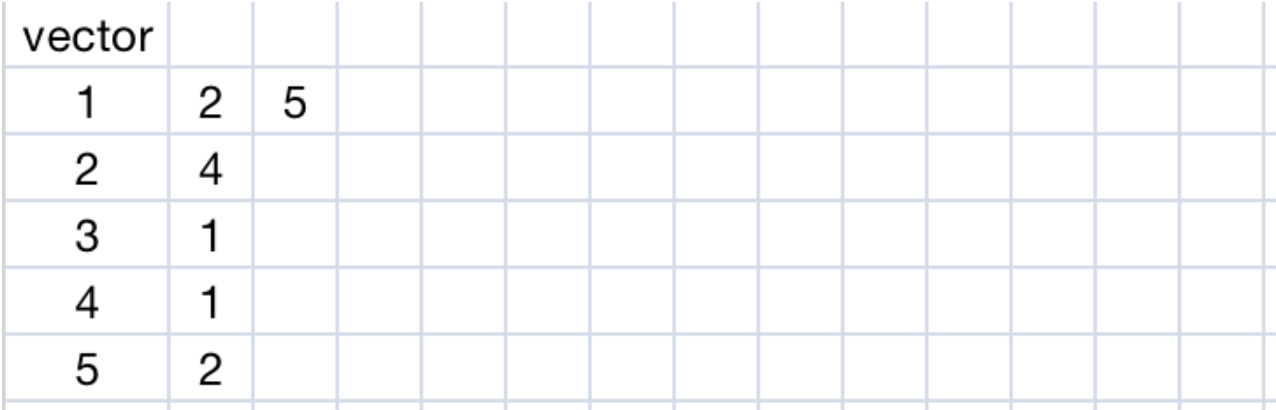
邻接表
用一个数组存储与一个点\(u\)相连的点有哪些。

将有向边\((1,2)\),\((1,5)\),\((2,4)\),\((3,1)\),\((4,1)\),\((5,2)\)添加到邻接表中:
/* 使用之前清空ver和edge数组 */
const int MAX_EDGES = 100005;
vector<int> ver[MAX_EDGES], edge[MAX_EDGES];
void add(int u, int v, int w) {
ver[u].push_back(v);
edge[u].push_back(w);
}
/* 假设这里要找所有与u相连的点以及边的边权 */
void traverse(int u) {
for (int i = 0; i < ver[u].size(); i++) {
int v = ver[u][i];
int w = edge[u][i];
}
}
链式前向星
链表初步
有这样一个结构体数组:
struct Node {
int val, next;
} a[Maxn];
画成图:


那么这个开头地址为1的链表,表示的数字串就是:7,2,3,5,0,-2.
链式前向星
链式前向星的本质就是链表。
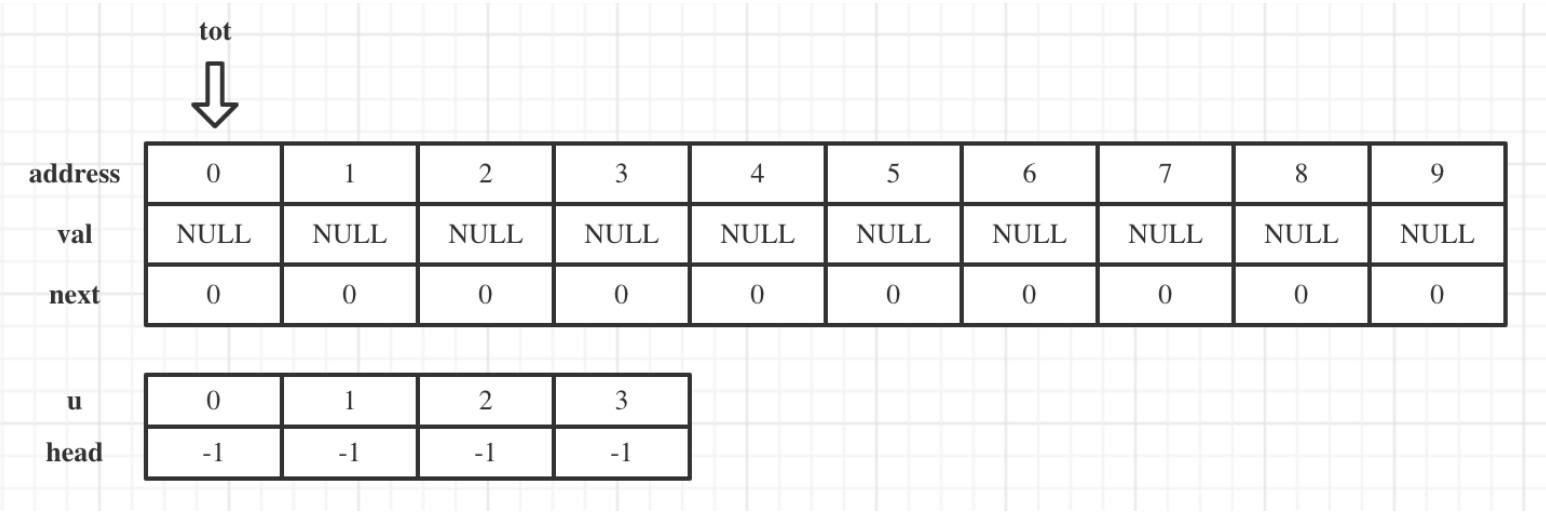
/* 使用之前调用init函数初始化 */
const int Maxn = 100005;
struct EDGE {
int v, w, next;
} e[Maxn << 1];
int head[Maxn], tot = 0;
void init() {
memset(head, -1, sizeof head);
tot = 0;
}
void add(int u, int v, int w) {
e[tot].v = v;
e[tot].w = w;
e[tot].next = head[u];
head[u] = tot++;
}
/* 假设这里要找所有与u相连的点以及边的边权 */
void traverse(int u) {
for (int i = head[u]; i != -1; i = e[i].next) {
int v = e[i].v;
int w = e[i].w;
}
}
邻接表与链式前向星的优劣对比
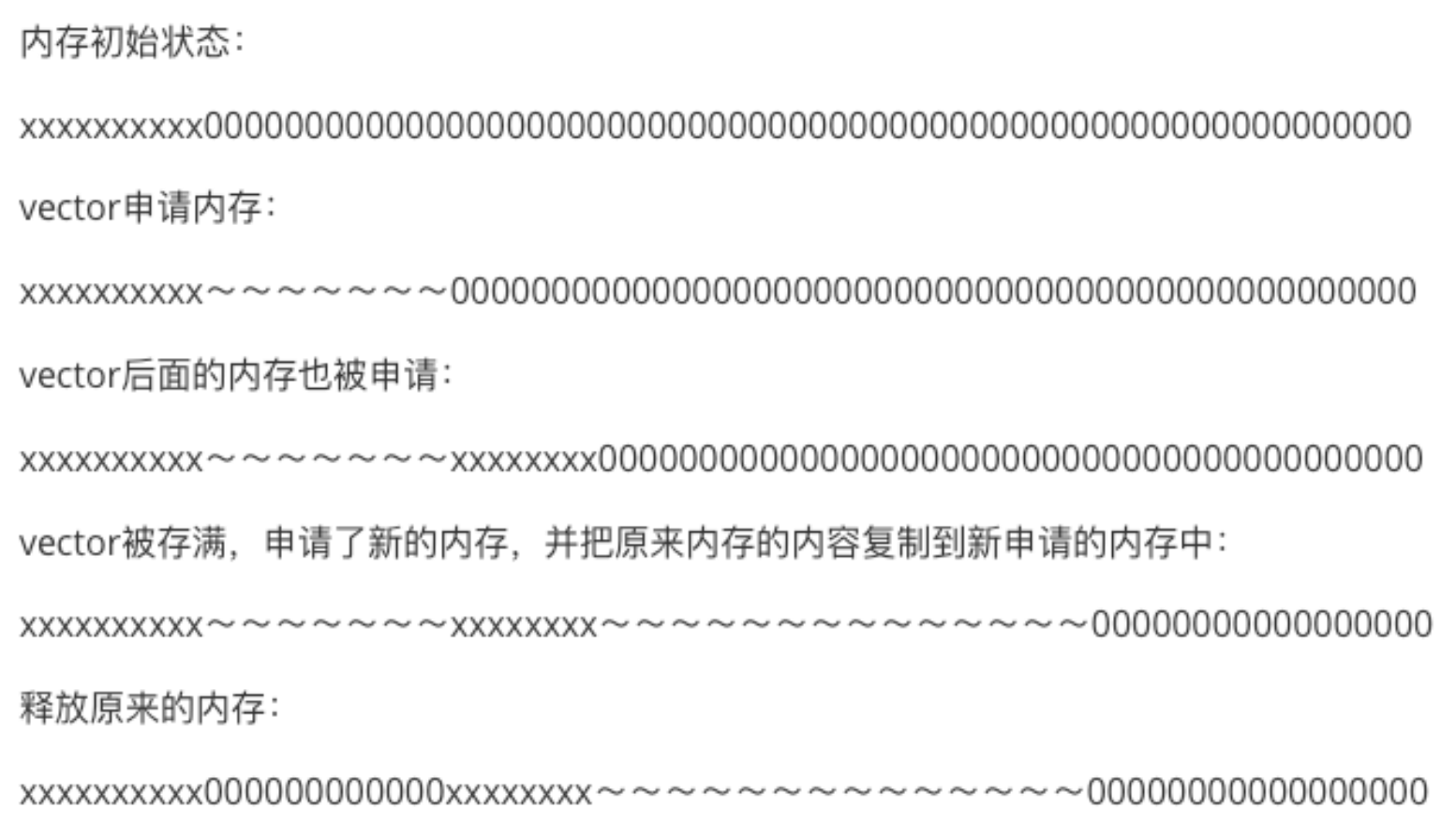
在提前知道边数量的前提下,优先使用链式前向星,原因在于实现邻接表的\(vector\)的扩充机制会导致邻接表变慢。
* \(vector\)和数组在内存中都是连续的,不同的是\(vector\)的容量是可以变化的。假如一开始\(vector\)申请了一个长度为10的连续内存,那么当这些内存被用完之后,\(vector\)会再申请一个两倍于目前大小的内存,然后把原来内存中的内容复制到新申请的内存中,而这个复制的过程会比较慢。
最短路算法
什么是最短路?
最短路顾名思义,就是在一个图中找到两个点(vertex)之间的最短路径。这里的最短路径也不仅仅局限在距离的最短,也可以扩展到其他度量上,例如时间等。
常见的最短路算法
DFS(深度优先搜索)、BFS(广度优先搜索)
Dijkstra算法
Floyd算法
SPFA算法
DFS、BFS
DFS找到所有可能的路径取其中最短的一条作为最短路。
BFS个人认为在找最短路方面在各方面是比DFS优秀的,原因在于如果一个图是完全图,那么DFS是时间复杂度是\(O(n!)\),大概有12个点DFS就会完全卡住,而BFS的时间复杂度是\(O(n)\)。
需要注意的是,DFS和BFS仅仅只能搜索边权值相等或者根本没有权的图,如果边的权值不相等,那么就需要用更高级的最短路算法进行最短路的寻找,比如下面就要讲到的Dijkstra算法。
Dijkstra算法
算法描述
Dijkstra算法采用了一种贪心的方法。
他用一个dis数组来存储从源点s到其他所有点的最短距离,这个dis的初始值全部设置为INF,可以用memset(dis, 0x3f, sizeof dis)\(^1\)来实现,而dis[s]初始化为0,原因显然,从s出发到s的最短路径就是0;
用一个集合来存储还没有求出最短路径的顶点,这里我们可以称这个集合为:我不知道我是不是“最短的”群体,简称U(unknown),在最一开始所有的顶点都在这个集合中,包括s;
用一个集合来存储已经求出来最短路径的顶点,我们称之为:我知道我是“最短的“群体,简称K(know),与U集合相反这个集合最一开始是空的。
以上就是开始求最短路开始之前的准备工作,下面介绍一下最短路的具体实现过程:
每次从“我不知道我是不是‘最短的’群体”(U)中找出dis最小的顶点(如果有多个选任意一个即可),假设这个点是\(V_{m}\),
那么\(dis[V_{m}]\)从理论上来说就是从源点s到点\(V_{m}\)的最短路长度(对此有疑问的,下面会给出证明),
因为这个点已经能确定是最短路径,所以把它从“我不知道我是不是‘最短的’群体”集合中踢出去,把它加到“我知道我是’最短的‘群体”中,
同时把与\(V_m\)相连的顶点(\(V_{m_1},V_{m_2},..\))进行“松弛”操作,什么是松弛操作呢?
就是看看从源点s途径\(V_m\)(最短路)到达与\(V_m\)相连的顶点(\(V_{m_i}\))的距离会不会比原来的\(dis[V_{m_i}]\)要小,如果是那么就更新把\(dis[V_{m_i}]\)更新一下。
简单来说就是一行代码dis[v] = dis[u] + w,其中v是上面提到的\(V_{m_i}\),u是上面提到的\(V_m\),w是u、v之间边的权值。
重复上面操作直到集合“我不知道我是不是’最短的‘群体”变成空的(或者“我知道我是’最短的‘群体”包含图中全部的点),算法就结束了,\(dis\)数组中存储的就是最终最短路的结果。
总结一下就是说,从集合U中找到\(dis\)最小的顶点,把它加入到集合K中,从集合U中去除掉,并对与该点相连的点进行松弛操作。
伪代码
set U, K;
把所有的顶点加到集合U中;
dis[nv];
memset(dis, 0x3f, sizeof dis);
while U is not empty:
minn = INF;
u = -1;
for each vertex v in U:
if dis[v] <= minn:
minn = dis[v];
minn_vertex = v;
U.erase(u);
K.insert(u);
for each v connect to u:
if dis[v] > dis[u] + w:
dis[v] = dis[u] + w;
算法演示
以下面这张图作为演示,源点s设为0.
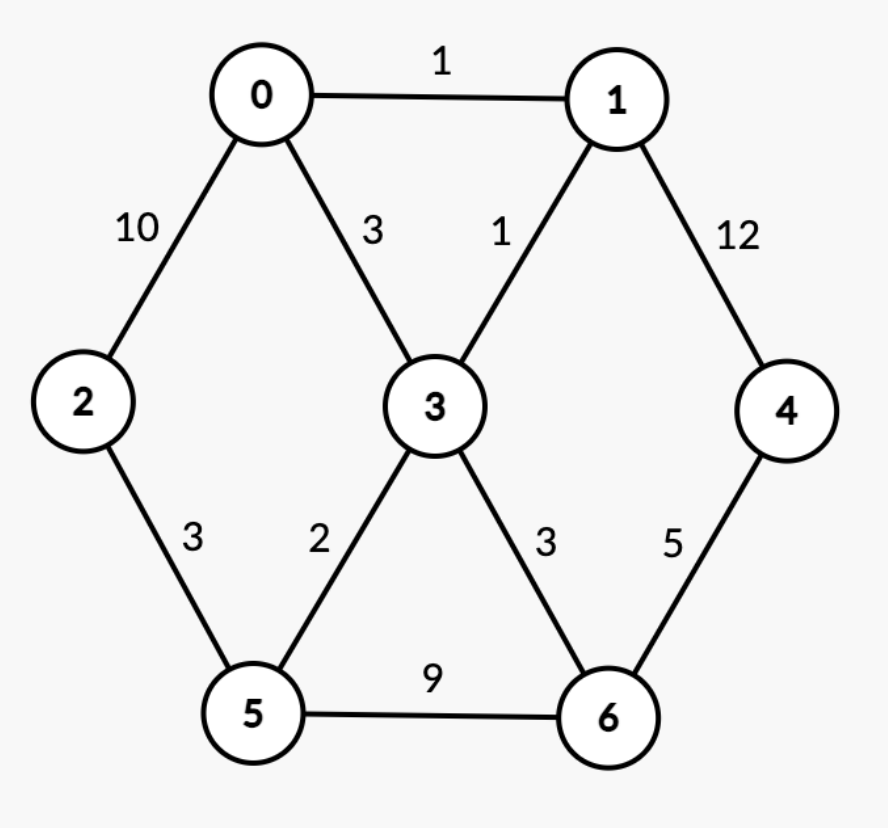
初始状态下\(dis\)、\(U\)、\(K\)的情况如下:
| vertex | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|---|
| dis | 0 | INF | INF | INF | INF | INF | INF |
| U | K |
|---|---|
| 0、1、2、3、4、5、6 | NULL |
-
从集合U中找\(dis\)最小的顶点,得到顶点0;
把0加入到集合K,从集合U中去除掉,对0周围的顶点进行松弛,现在的状态如下:
vertex 0 1 2 3 4 5 6 dis 0 1 10 3 INF INF INF
| U | K |
|---|---|
| 1、2、3、4、5、6 | 0 |
- 从集合U中找\(dis\)最小的顶点,得到顶点1;
把1加入到集合K,从集合U中去除掉,对1周围的顶点进行松弛,现在的状态如下:
| vertex | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|---|
| dis | 0 | 1 | 10 | 2 | 13 | INF | INF |
| U | K |
|---|---|
| 2、3、4、5、6 | 0、1 |
- 从集合U中找\(dis\)最小的顶点,得到顶点3;
把3加入到集合K,从集合U中去除掉,对3周围的顶点进行松弛,现在的状态如下:
| vertex | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|---|
| dis | 0 | 1 | 10 | 2 | 13 | 4 | 5 |
| U | K |
|---|---|
| 2、4、5、6 | 0、1、3 |
- 从集合U中找\(dis\)最小的顶点,得到顶点5;
把5加入到集合K,从集合U中去除掉,对5周围的顶点进行松弛,现在的状态如下:
| vertex | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|---|
| dis | 0 | 1 | 7 | 2 | 13 | 4 | 5 |
| U | K |
|---|---|
| 2、4、6 | 0、1、3、5 |
- 从集合U中找\(dis\)最小的顶点,得到顶点6;
把6加入到集合K,从集合U中去除掉,对6周围的顶点进行松弛,现在的状态如下:
| vertex | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|---|
| dis | 0 | 1 | 7 | 2 | 10 | 4 | 5 |
| U | K |
|---|---|
| 2、4 | 0、1、3、5、6 |
5.6. 从集合U中得到2和4,重复上面点操作。
算法结束后dis数组情况如下:
| vertex | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|---|
| dis | 0 | 1 | 7 | 2 | 10 | 4 | 5 |
小注:上面提到的集合k没有实际在下面的代码中并没有体现,而之所以提到它是因为这个算法的标准描述中提到了这样一个集合。
对算法进行优化
优先队列初步
优先队列的使用
优先队列\(priority\_queue\)在头文件\(queue\)中。
它是与队列\(queue\)相似,\(queue\)每次是将最先进入队列的元素弹出队列,而\(priority\_queue\)是将优先级最高的元素弹出队列。
在\(priority\_queue\)中,元素的优先级是由运算符\(<\)决定的,举两个例子:
1. 在优先队列中有四个整数\(1,4,6,11\),他们的关系是\(1<4<6<11\),所以在这个优先队列中,弹出队列的顺序依次是\(11,6,4,1\);
2. 在优先队列中有四个整数$1,4,6,11$,首先先弹出来一个元素,再在优先队列中插入三个元素:$3,12,5$,之后再不断的从队列中弹出元素直到为空,那么弹出的顺序就是:$11,12,6,5,4,3,1$.
优先队列的基本操作:
\(push\) 向队列中插入一个元素
\(top\) 与队列\(queue\)的\(front\)类似,前者是从优先队列中弹出优先级最高的元素,后者是从队列中弹出最先进入队列的元素。
\(empty\) 如果优先队列为中返回\(true\)否则返回\(false\).
时间复杂度:
优先队列使用堆实现的,\(top\)操作复杂度为\(O(1)\),\(push\)操作的复杂度\(O(logn)\).
结构体运算符重载
在内建类型中比如\(int,double\),他们可以进行\(+-*/ \le \ge\)等操作,但是在自己定义一个结构体,比如下面这个结构体:
struct Node {
int a, b;
};
在重载结构体运算符之前,两个\(Node\)相加的意思可能是\(a,b\)分别相加得到新的 \(Node\)也可能是两个\(Node\)的\(a\)分别相加,两个\(b\)取较大的一个得到新的\(Node\),甚至可以是其他的操作。
在这些操作中可能你自己比较清楚究竟你的\(+\)想要完成什么操作,但是计算机是不清楚的,所以需要明确的告诉计算机\(+\)究竟是要完成怎样的操作。
而告诉计算机的方式就是重载运算符。
比如想要对结构体重载\(+\)运算符,完成的操作是上面提到的第二种“两个\(Node\)的\(a\)分别相加,两个\(b\)取较大的一个得到新的\(Node\)”:
struct Node {
int a, b;
bool operator + (const Node &x) const {
Node res;
res.a = a + x.a;
res.b = std::max(b, x.b);
}
};
重载\(<\)运算符,完成的操作是比较两个\(Node\)的\(a+b\)的大小:
struct Node {
int a, b;
bool operator + (const Node &x) const {
Node res;
res.a = a + x.a;
res.b = std::max(b, x.b);
}
bool operator < (const Node &x) const {
return a + b < x.a + x.b;
}
};
需要注意的是只有运算符才能重载,比如+-*/^&|,而不能重载一个字母或者一个不是运算符的符号。
对于其他的运算符可以参照上面的代码自行修改。
结构体初始化函数
参照前面说到的结构体\(Node\),创建\(Node\)的对象:
struct Node {
int a, b;
}x, y[100];
Node c[100], d[100];
// 这里演示创建结构体对象的方法,这段代码中x,y,c,d都是有效的。
现在要对\(x\)进行赋值,可以这样写:
x.a = 1; x.b = 2;
也可以定义一个结构体初始化函数:
struct Node {
int a, b;
Node(){}
Node(int a, int b):a(a), b(b){}
}x;
这样对\(x\)进行赋值就可以这样写:
x = Node(1, 2);
注意到在定义初始化函数的时候,有这样的一句Node(){},它是用来重载的,如果没有这个语句在声明对象的时候会出现问题,有兴趣的自行查阅资料,这里不展开。
优先队列对算法进行优化
思考
观察上面提到的Dijkstra伪代码:
set U;
把所有的顶点加到集合U中;
dis[nv];
memset(dis, 0x3f, sizeof dis);
while U is not empty:
minn = INF;
u = -1;
for each vertex v in U:
if dis[v] <= minn:
minn = dis[v];
minn_vertex = v;
U.erase(u);
for each v connect to u:
if dis[v] > dis[u] + w:
dis[v] = dis[u] + w;
如果这段程序真正运行起来的时候,上面的哪一步操作会消耗大量的时间?
“寻找集合U中\(dis\)最小的顶点”这个操作会消耗大量的时间,因为每次查找都要把U集合完整遍历一遍才能知道哪个点的\(dis\)是最小的,查找复杂度是\(O(n)\),当nv比较大的时候很容易就TLE,因此需要对它进行优化。
首先,想一下\(dis\)最小的点可能会出现在哪里?
\(dis\)最小的点一定是已经是在经过松弛操作之后后的点中出现,因为没有经过松弛操作的点的\(dis\)是无穷大,只要经过松弛操作的点就一定比无穷大要小。
其次,在有了上面结论之后,优先队列是够能辅助完成“寻找集合U中\(dis\)最小的顶点”这个操作?
优先队列\(push\)和\(top\)这两个操作都非常的快,我们定义一个结构体,里面包含点和\(dis\)这两个信息,并对\(<\)运算符进行重载,使得\(dis\)小的元素优先出队。这样在每次松弛操作之后,就将被松弛的点以及\(dis\)打包进结构体并\(push\)进优先队列。这样每次只用\(O(logn)\)的时间就能找到\(dis\)最小的点,相比之前的\(O(n)\)可以说是巨幅优化。
Dijkstra算法模版题
题目:
给定一个\(n\)个点,\(m\)条有向边的带非负权图,请你计算从\(s\)出发,到每个点的最短距离。
数据不保证你能从\(s\)出发到任意点,如果不能到达输出\(-1\)。
提示:
不能到达的点\(dis\)是INF.
代码:
见附录A-1
算法正确性证明
为什么要进行正确性证明
算法证明
Dijkstra算法的变形-最长边最短的路径
题目:
给定一个\(n\)个点,\(m\)条有向边的带非负权图,请你计算从\(s\)出发,到每个点的路径中最长的边最短是多少?
松弛代码:
if (dis[v] > std::min(dis[u], w)) dis[v] = std::min(dis[u], w)
完整代码:
见附录A-2
Dijkstra算法的变形-最短边最长的路径
题目:
给定一个\(n\)个点,\(m\)条有向边的带非负权图,请你计算从\(s\)出发,到每个点的路径中最短的边最长是多少?
松弛代码:
if (dis[v] < std::max(dis[u], w)) dis[v] = std::min(dis[u], w)
完整代码:
见附录A-3
Dijkstra算法的一个小技巧-反向建边
完整代码:
见附录A-4
时间复杂度和空间复杂度分析
小结
核心是松弛
Floyd算法
算法描述
伪代码(和真的一样)
时间复杂度和空间复杂度(需要注意的问题)
算法正确性(略)
Floyd算法模版题
Floyd算法的变形-
Floyd算法的变形-
Floyd判断负环
SPFA算法
算法描述
伪代码
算法正确性证明(略)
时间复杂度和空间复杂度
SPFA模版题
什么是负环
用SPFA进行负环判断
总结
加餐(我当时的一些疑问)
memset赋初始值
结构体重载运算符
结构体的初始化函数
优先队列的一些基本使用
为什么优先队列比较为false的优先出队列?
路径记录
附录A-代码
1. Dijkstra算法模版题
#include <cstdio>
#include <cstring>
#include <queue>
const int Maxn = 500005;
const int INF = 0x3f3f3f3f;
struct EDGE {
int v, w, next;
} e[Maxn << 1];
int head[Maxn], tot = 0;
void add(int u, int v, int w) {
e[tot].v = v;
e[tot].w = w;
e[tot].next = head[u];
head[u] = tot++;
}
struct Node {
int pos, dis;
Node(){}
Node(int pos, int dis):pos(pos), dis(dis){}
bool operator < (const Node &x) const {
return dis > x.dis;
}
};
int dis[Maxn];
bool vis[Maxn];
void dijkstra(int s) {
memset(vis, 0, sizeof vis);
memset(dis, INF, sizeof dis);
dis[s] = 0;
std::priority_queue<Node>q;
q.push(Node(s, 0));
for (; !q.empty();) {
Node f = q.top();
q.pop();
int u = f.pos;
if (vis[u]) continue;
vis[u] = true;
for (int i = head[u]; i != -1; i = e[i].next) {
int v = e[i].v;
int w = e[i].w;
if (dis[v] > dis[u] + w) {
dis[v] = dis[u] + w;
q.push(Node(v, dis[v]));
}
}
}
}
void solve() {
memset(head, -1, sizeof head);
int nv, ne, s;
scanf("%d %d %d", &nv, &ne, &s);
int u, v, w;
for (int i = 0; i < ne; i++) {
scanf("%d %d %d", &u, &v, &w);
add(u, v, w);
}
dijkstra(s);
for (int i = 1; i <= nv; i++) {
printf("%d%c", dis[i] == INF ? -1 : dis[i], " \n"[i == nv]);
}
}
int main() {
solve();
return 0;
}
2. Dijkstra算法的变形-最长边最短的路径
3. Dijkstra算法的变形-最短边最长的路径
4. Dijkstra算法的一个小技巧-反向建边
附录B-证明
参考文献
[3] 百度百科-迪克斯特拉算法
[5] 优先队列用法
[6] 图论入门及基础概念(图篇)
[7] 负环
[8] 邻接表模板(算法竞赛进阶指南)
[9] 通俗易懂讲解 链表

 浙公网安备 33010602011771号
浙公网安备 33010602011771号