

自制CPU的黑暗历程一
数据通路
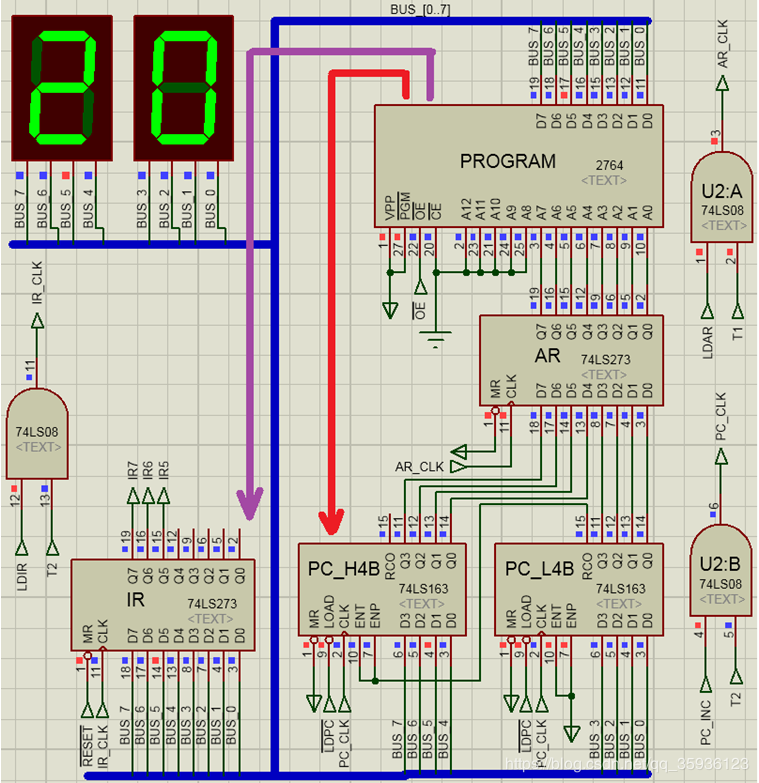
为了理解微程序控制器的设计思想,我们假设一个极简的数据通路(如下图1所示),由并联在单条8位总线BUS上的三个部件组成:指令寄存器IR(寄存器74LS273构成)、程序计数器PC(计数器74LS163构成)、程序存储器PROGRAM(ROM存储器2764构成)。
图1. 数据通路图
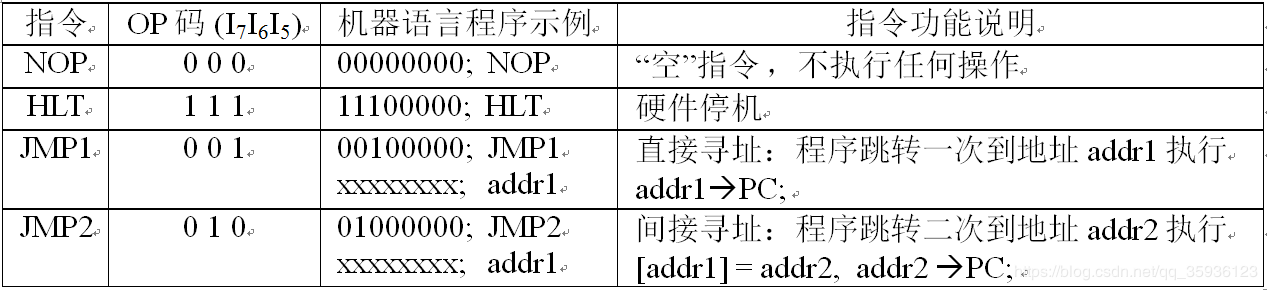
在数据通路上所能执行的某一种操作可以看作是一条对应的“指令”,则该数据通路能执行的所有操作可以用一个极简的指令集(只包含四条指令)来描述,如下表1所示:
表1. 微程序控制器指令集列表
按照上述指令表1的指令格式,用户可以编写一段机器语言程序存放在程序存储器PROGRAM中,如下表2所示。其中每一个存储器单元存放一个字节的数据,对应唯一的8位二进制地址(由地址寄存器AR锁存)。若用户需要访问程序存储器的某个单元,须由程序计数器PC提供该单元的地址,才能从程序存储器取出该单元中的数据。因为程序是顺序访问的,所以程序计数器PC是由两个计数器74LSl63级联构成的一个8位递增计数器PC。当前指令从程序存储器PROGRAM取出,并锁存到指令寄存器IR后,PC自动执行PC+1操作,指向相邻下一条指令。
表2. 程序存储器PROGRAM中的机器语言程序
微程序设计原理
仔细分析上述图1和表1可知,数据通路的各条指令状态图如下图2所示:所有指令的取指操作都是相同的,即是上图1中紫色箭头所示的指令流(ROM→IR):CPU从程序存储器PROGRAM取出指令,经过总线BUS流向指令寄存器IR。NOP和HLT指令只有上述取指操作,没有执行操作(HLT指令取指后硬件停机);而JMP1和JMP2指令除了上述取指操作外,实际只有一种执行操作,即上图1中红色箭头所示的数据流(ROM→PC):CPU从程序存储器PROGRAM取出数据,经过总线BUS流向程序计数器PC。两种跳转指令不同之处在于:JMP1指令的第二字节是目标地址(直接寻址),只要一次数据流(ROM→PC)就把目标地址送入PC;而JMP2指令的第二字节是存放目标地址的存储器单元地址(间接寻址),需要连续两次数据流(ROM→PC)才能把目标地址送入PC。
图2. 微程序控制器指令状态图

在上图2中,虽然微程序控制器指令的状态类型只有两种(指令流和数据流),但是每一条指令拥有的状态数目都不尽相同,其中最关键问题是如何根据不同的指令来判断状态的转移。因此我们可以采用微程序原理来解决这个问题:图2中每一条指令都是一个任务,一个状态则对应一条微指令。若干条微指令组合成一段微程序,解决相对应的任务。
微指令的字长设为24位,结构如下图3所示:
1-5位表示该微指令执行后,下一条微指令的地址 [uA4, uA0](即下址转移方式);
6-7位是判断字段Px:P1=1表示该微指令是取指微指令;,P2空缺。
8-24位是微命令字段:微命令即是图1所示数据通路中的微操作信号,其中某位置“1”,表示该位的微命令有效;反之,置“0”则表示该位的微命令无效。
图3. 微指令结构图
仔细观察数据通路图1,可以发现指令的取指或执行过程都是指令或数据从一个部件打入总线BUS,再从总线BUS打入另一个部件的过程。为了保证上述操作先后次序,指令流(ROM→IR)和数据流(ROM→PC)都分为T1和T2两个周期:T1周期,信息从源部件(例如程序存储器PROGRAM)打入总线BUS;T2周期,信息从总线BUS打入目标部件(例如指令寄存器IR或者程序计数器PC),如下表3所示。因此,在图3所示的微操作信号中,除了信号#OE(存储器输出使能)和#LDPC(PC加载使能)是全过程有效外,其他信号需要与T1或T2周期节拍信号逻辑“与”,产生新的边沿触发信号,在指定周期开始时刻上升沿跳变,例如AR_CLK=LDAR•T1,IR_CLK=LDIR•T2,PC_CLK=PC_INC•T2
表3. 数据通路的微操作信号列表
综合上述微指令结构图3和微操作信号列表3,通过分析微程序控制器指令状态图2,可以得到如下图4所示的微程序流程图:图中每一个方框在时间上表示一个微指令周期,包括T1(源部件→总线)和T2(总线→目标部件)两个周期;在空间上表示一条微指令,通过一系列微操作信号使得信息从某个源部件经过总线BUS到达目标部件。图中每个方框的右上方是对应微指令的地址,右下方是对应微指令的下一条微指令的地址(简称下址)。
图4. 指令的微程序流程图
上述微程序流程图4中,最上方首先执行的方框是公共的取指微指令,即指令流(ROM→IR)。取出指令后, P1菱形框表示指令译码及地址转移:根据当前指令OP码的[I7,I6,I5]位形成其执行周期第一条微指令地址[0,0,I7,I6,I5],从而选择该指令的执行周期。菱形框下的四条路径对应指令列表1所述的四条指令的执行周期,其中每个方框是一条执行微指令,即数据流(ROM→PC)。值得注意的是,NOP指令和HLT指令只有取指周期,没有执行周期。NOP指令的OP码是000,取指后译码得到的第一条微指令地址仍为[00000],即直接返回下一条指令的取指周期。而HLT指令的OP码是111,译码后直接令硬件停机。在所有路径末尾,最后一条微指令的下址[uA4-uA0]都必须是取指微指令地址[00000],即一条指令结束后必须返回取指微指令,准备取出下一条指令。如图4左上方所示,整个数据通路的运行过程就是不断循环的取指令和执行指令。图4中总共有三条微指令,其编码如下表4所示(具体位置的微命令含义请参考微指令结构图3)。
表4. 微指令列表
微程序控制器
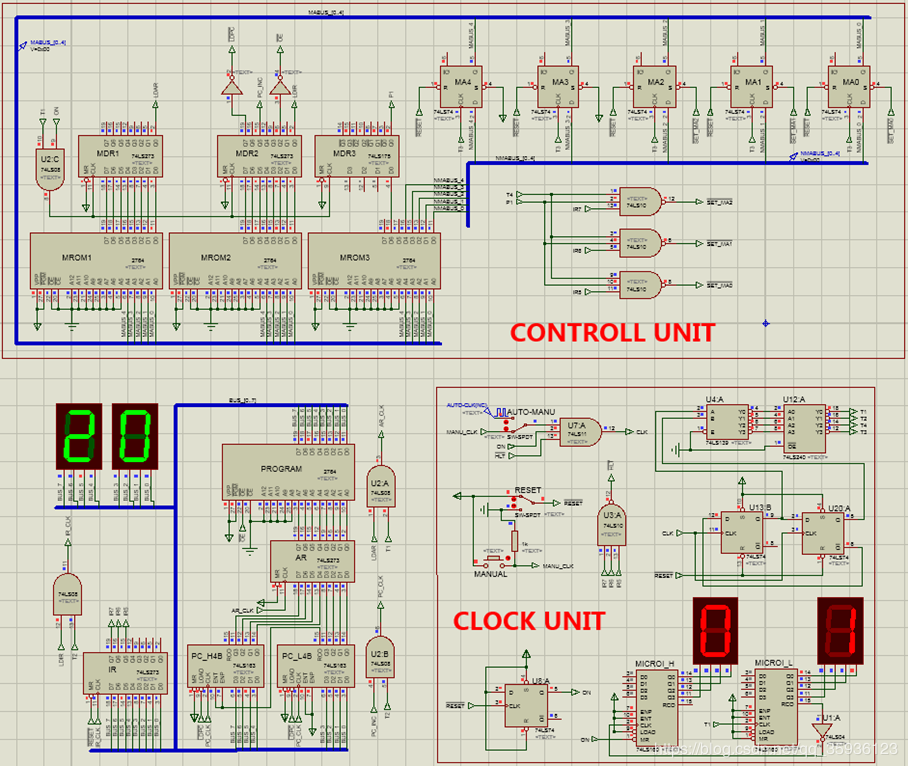
上述微指令列表4相当于一个并行的操作开关序列,用户根据微程序流程图4,在规定的微指令周期(方框),按照规定的节拍Tx,拨动特定的操作开关序列(微指令),就可以实现从程序存储器PROGRAM中取出和执行一条机器指令。更进一步,我们可以用时序发生器输出预定的时序,通过微程序控制器按时序自动产生操作信号,代替用户在数据通路中完成的人工操作。时序发生器(CLOCK UNIT)、微程序控制器(CONTROLL UNIT)和数据通路共同构成一个最小版本的CPU,如下图5所示。
图5. 最小版本CPU电路图
在上述CPU电路图5中,代替用户人工操作的CPU部件是微程序控制器(CONTROLL UNIT),由控制存储器、微指令寄存器、微地址寄存器和地址转移逻辑电路组成,如下图6所示。CPU启动或复位后,微地址寄存器清零,控制存储器从地址[00000]开始输出微指令。如前述微指令结构图3所示,微指令包括了控制字段、下址字段和判断字段。控制字段即下图6中的微命令字段,直接输出微操作信号执行当前微指令;下址字段锁存在微地址寄存器,待当前微指令执行完后,再从控制存储器取出下一条微指令。若当前微指令是取指微指令,则P字段启动地址转移,根据指令寄存器IR中的OP码修改微地址寄存器,转向指令执行周期的第一条微指令。
图6. 微程序控制器结构图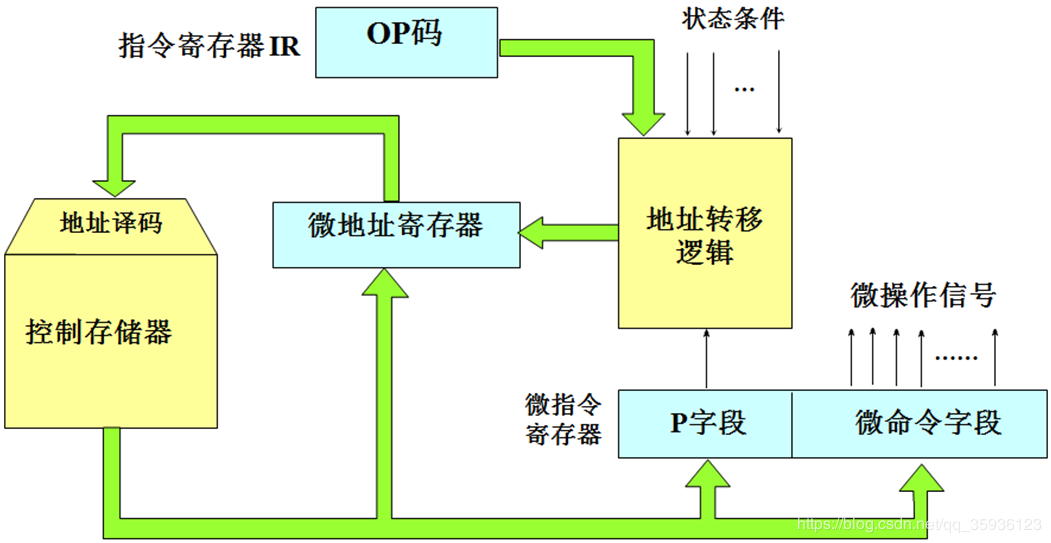
存放上述微指令列表4的存储器电路如下图7所示:微指令存储器字长24位,由3个2764芯片MROM1-3组成,其输出端则连接着微指令寄存器MDR1-3(寄存器74LS273和74LS175构成)。在系统启动(信号ON=1)或T1周期开始(信号T1=1)时刻, MROM1-3输出当前微指令的微操作信号,锁存在MDR1-3,送往数据通路执行。部分微操作信号(LDAR、LDIR、PC_INC)与T1或T2节拍组合,产生边沿触发信号(AR_CLK、IR_CLK、PC_CLK),在T1或T2周期开始时刻上升沿跳变。
图7. 微程序控制器的存储器电路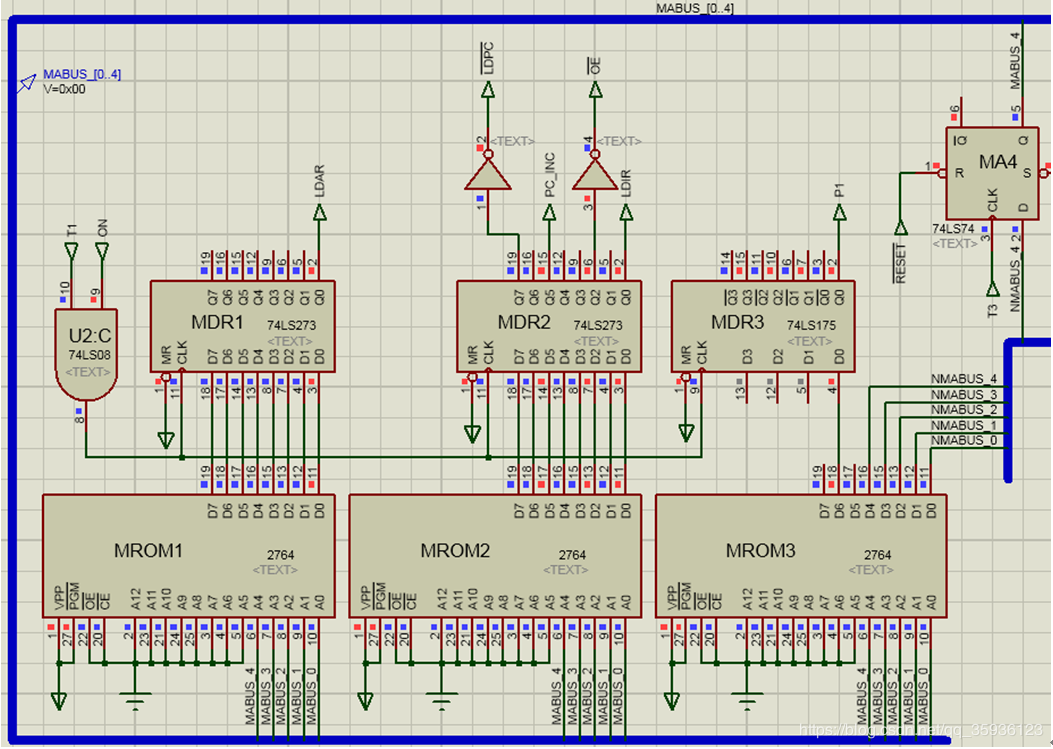
如下图8所示,控制器的微地址寄存器字长五位(MA4-MA0),由触发器74LS74组成,其输入端通过NMABUS总线连接当前微指令的下址字段[uA4-uA0],其输出端通过控制存储器的地址总线MABUS送到控制存储器的地址端A4~A0。值得注意的是,上述微程序控制器结构图6中的地址转移逻辑(即微程序流程图4中的菱形框P1)在下图8中对应的就是三个三路与非门74LS10。在取指周期末尾,微指令下址字段本来是[00000];然而判断字段P1=1,启动地址转移逻辑,根据指令寄存器IR的OP码[I7,I6,I5]生成信号#SET_MAx=0,强制把微地址寄存器MA4-MA0置位为[0,0,I7,I6,I5],即该指令执行周期的第一条微指令地址。
图8. 微地址寄存器和地址转移逻辑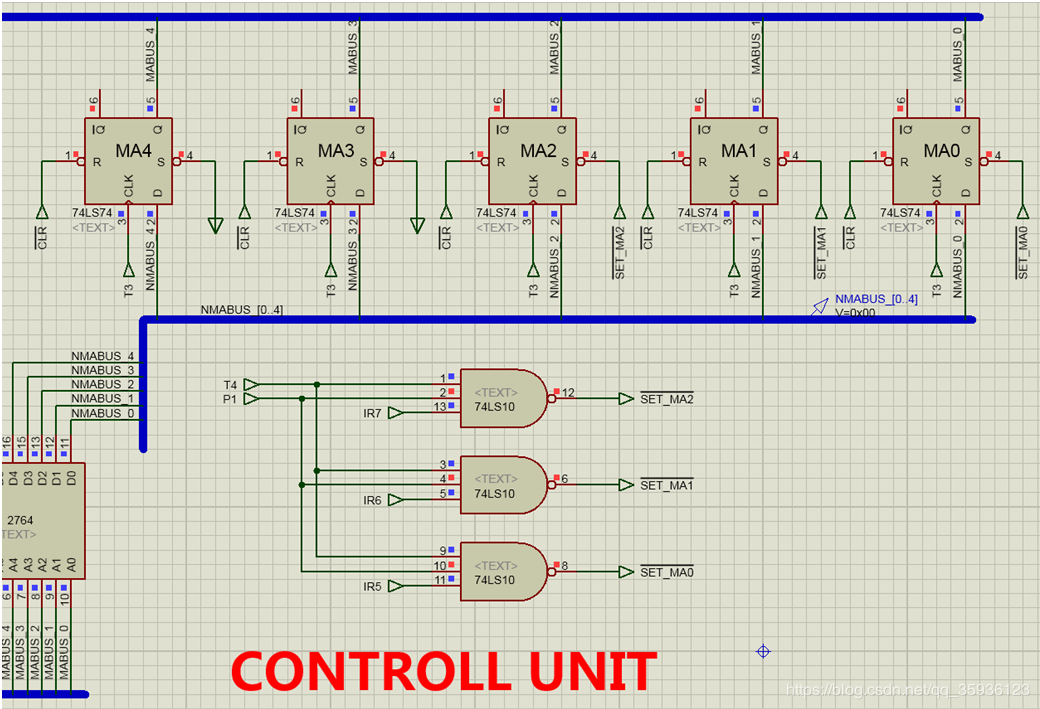
上述微程序的地址转移过程需要在微指令周期增加T3和T4两个周期:T3周期,当前微指令的下址字段[uA4-uA0]通过NMABUS总线打入微地址寄存器MA4-MA0,进而通过地址总线MABUS送往微指令存储器MROM1-3的地址端,使其输出下一条微指令;T4周期,若当前微指令是执行周期微指令,则P1=0,无任何操作;若当前微指令是取指周期微指令,则P1=1,启动地址转移逻辑,重置微指令地址,跳转到当前指令的执行周期第一条微指令。
综上所述,一条CPU指令就是一段微程序,其中包含若干条微指令(至少有一条是取指微指令)。所以,“微程序”时序如下图9(左)所示:每个指令周期都包含了若干条微指令的机器周期(即微指令周期),其中至少有一个取指微指令周期。而且,每一条微指令的运行过程都可以看成是一个状态机,如下图9(右)所示:状态机有4个状态{T1,T2,T3,T4},每个状态【Tx】完成从取指、执行到判断下址的相应任务,状态转移T1→T4的一次循环即是一个微指令周期。因此,每个微指令周期内部包含了四个节拍信号Tx,对应“微指令”状态机的4个状态{T1,T2,T3,T4},状态机周而复始在四个状态【Tx】之间顺序转移,
图9. 微程序的时序图和状态机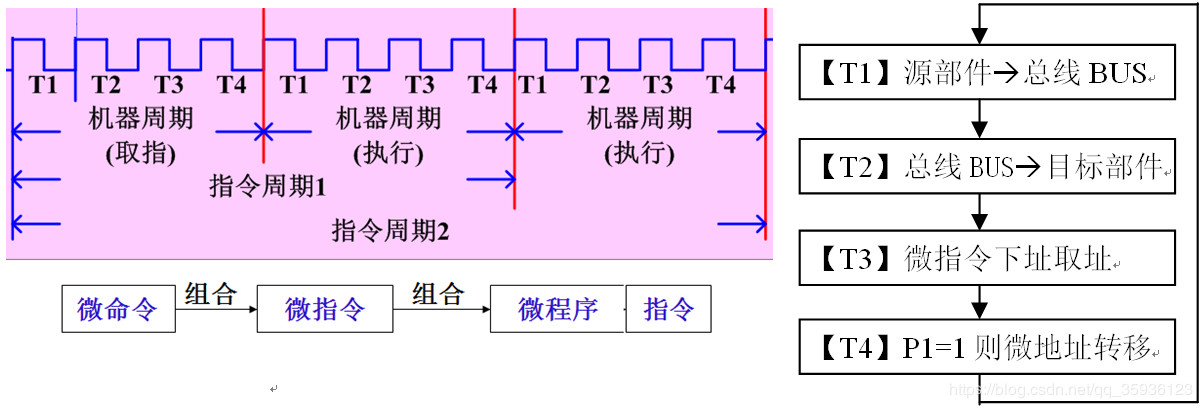
CPU时序发生器如下图10所示,主要功能是为上述微程序控制器提供时序控制。其中最核心的状态转移电路是由两个D触发器组成的一个2位扭环计数器,输出节拍序列{T1,T2,T3,T4}={00,01,11,10}。CLK为整个CPU电路的时钟信号,可以由手动按键MANUAL_CLK或方波信号源AUTO_CLK生成(双击信号源可以自行选择方波信号频率)。
时序发生器还提供了硬件电路实现HLT指令的停机功能(即断点)。当指令寄存器IR的OP码I7I6I5=111的时候,停机信号#HLT=0,阻塞CLK输出,CPU停机在HLT指令的取指周期T2节拍上。跳出HLT指令断点的复位过程与上述初始化过程相同,信号 #RESET=0令指令寄存器IR清零,OP码[I7,I6,I5]=000,则#HLT=1,跳出“断点”;同时,扭环计数器强制为状态T1={00}。#RESET=1,复位成功,CPU进入HLT指令后续下一条指令的取指周期T1节拍。
此外,为了观测微程序的运行,时序发生器电路提供了一个由节拍信号T1上升沿驱动的双位微指令计数器MICRO-I(两个十进制加法计数器74LS160级联构成),通过数码管显示当前运行第几条微指令,显示范围是1~99,如下图10右边所示。
图10. 微程序控制器的时序发生器
java新手自学群 626070845
java/springboot/hadoop/JVM 群 4915800
Hadoop/mongodb(搭建/开发/运维)Q群481975850
GOLang Q1群:6848027
GOLang Q2群:450509103
GOLang Q3群:436173132
GOLang Q4群:141984758
GOLang Q5群:215535604
C/C++/QT群 1414577
单片机嵌入式/电子电路入门群群 306312845
MUD/LIB/交流群 391486684
Electron/koa/Nodejs/express 214737701
大前端群vue/js/ts 165150391
操作系统研发群:15375777
汇编/辅助/破解新手群:755783453
大数据 elasticsearch 群 481975850
本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 记一次.NET内存居高不下排查解决与启示
· 探究高空视频全景AR技术的实现原理
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· SQL Server 2025 AI相关能力初探
· AI编程工具终极对决:字节Trae VS Cursor,谁才是开发者新宠?
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南