
动作识别总结
羽毛球
1.一种基于机器学习的智能羽毛球拍 2019 http://www.doc88.com/p-1963906746970.html
三轴加速度+三轴角速度
K-NN分类
高远球、杀球、平抽、平挡、挑球、搓球
2.基于 HMM 的羽球动作实时识别2019
三轴加速度
改进的HMM 分类(K-means 聚类)
正手搓球、反手搓球、正手扑球、正手推球、正手挑球、反手挑球、正手高远和反手高远
3.基于加速度和角速度的羽毛球动作识别研究2018 https://www.ixueshu.com/document/6a3261ae85e489b8627a830e3379b04e318947a18e7f9386.html
三轴加速度+三轴角速度
马氏距离判别法(未用到神经网络)
抽球、挑球、挡球
4.基于体域网的运动行为识别算法的研究 2014 https://www.docin.com/p-1756421763.html
对比了三轴加速度、三轴角速度、三轴加速度+三轴角速度三种情况
双层HMM分类(先分类是否属于击球动作,在分类哪种击球动作)
15个击球动作
5. 【见乒乓球2、3】
乒乓球
1.基于加速度传感器的乒乓球击球动作识别2016 https://www.ixueshu.com/document/586c8b8cb957527fc05ae8828935a64a318947a18e7f9386.html
三轴加速度
融合K-NN的决策树分类算法
右手攻球、右手搓球、左手攻球、左手搓球、左手推球
2.关于乒乓球/羽毛球运动状态识别手表的设计2018 https://www.ixueshu.com/document/6a3261ae85e489b88a86ab684d9d9bdb318947a18e7f9386.html
三轴加速度+三轴角速度
随机森林
乒乓球:正手挥拍、反手挥拍、横板握法、直板握法
羽毛球:正手挥拍、反手挥拍、跳击
3.一种针对乒乓球或羽毛球运动动作识别方法2018 https://www.ixueshu.com/document/a8b9855222fc772cdec2c21bece3673a318947a18e7f9386.html
三轴加速度+三轴角速度
三层BP神经网络
计步器
1.一种基于移动终端的新型计步方法2017 https://www.ixueshu.com/document/10a911bfed7419cef4a8ab7ab3400cc3318947a18e7f9386.html
三轴加速度
M5_DTW(M5分类+DRW动态时间规整)
2.利用三轴加速度传感器的计步测算法 2015 https://my.oschina.net/airship/blog/382881
三轴加速度
峰值检测
概述
基于腕部三轴加速度的运动模式识别2018 http://xueshu.baidu.com/usercenter/paper/show?paperid=11620020yq170450ph1n0a30r0034822&site=xueshu_se
比较常用的预处理方法主要有滤波、加窗、重采样和归一化等办法。
目前对基于加速度传感器的人体行为识别的分类方法,主要有以下三种:
a. 统计模式识别的分类方法:有决策树(DT)、支持向量机(SVM)、K 近邻(KNN)和隐马尔科夫模型(HMM)等算法
b. 人工神经网络的分类方法
c. 模板匹配的分类算法:动态时间规整算法(DTW)
基于加速度传感器的人体前臂动作识别 2016
https://www.ixueshu.com/document/1a0a1ff99ddccf84ea86f04ce7094a75318947a18e7f9386.html
四种动作识别方法:动态时间规划、决策树分类、隐马尔科夫、分段线性判别分析
基于加速度传感器的人体动作识别方法研究 2016
https://www.docin.com/p-2179779167.html
行为识别属于模式识别问题,目前的行为研究使用到的算法大多是随机森林、隐马尔科夫hmm、支持向量机svm、人工神经网络ann、决策树等分类算法,以及聚类算法(kmeans、knn、高斯混合模型gmm)等 以及基于固定阈值的分类方法
基于三轴加速度传感器的人体动作识别研究2015 https://wenku.baidu.com/view/b1c80b77876fb84ae45c3b3567ec102de3bddf4f.html
三轴加速度
支持向量机svm
站立、走、跑、跳
基于智能手表的人体行为识别研究 2017 https://www.ixueshu.com/document/07ab6bb454441f2003e643cc5421ba3b318947a18e7f9386.html
三轴加速度
BP神经网络
DHMM离散隐马尔科夫 https://github.com/guxd/deepHMM
HMM隐马尔科夫
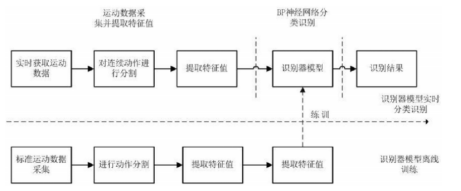
1.数据预处理:
(1)去噪
由于重力加速度是一个恒定的矢量,属于信号中的低频部分,有研究人员分别使用了 0.25 Hz和 0.5 Hz的低通滤波器,分离出信号中的线性加速度信号进行进一步的研究。
移动均值滤波器平滑了信号噪声,用巴特沃兹滤波器滤除高频噪声的影响。
(2)加窗
是指对时序输入信号按照一定相似长度的时间窗口进行分割,从而获得相同长度的数据段进一步提取相应的分类特征.目前常用的窗口分割技术有3种,滑动窗口,基于事件的窗口,基于动作的窗口。
目前针对于加速度传感器信号主流的数据加窗方法为滑动窗口法,需要考虑的因素有窗口大小以及重叠窗口大小。窗口大小会对分类准确率结果产生影响,如果窗口太小,则提取的特征可能难以覆盖一个动作周期,导致相邻窗口间的特征差异大,影响准确率。窗口太大的话则一个窗口内覆盖了多种运动动作,同样会使准确率受到影响。重叠窗口率是指相邻窗口之间重合的程度。其作用是减少过渡行为对于实验结果的影响。重叠窗口率设置为 50%对于解决问题来说效果是不错的.
(3)重采样
重采样技术能够使输入到分类器的数据保持一定的频率,能够解决不同智能设备的加速度传感器工作频率差异给算法应用和系统推广带来困难。
(4)归一化
归一化技术能够规整加速度信号的数值范围,能够防止产生由于不同用户的运动强度不同导致分类器泛化效果差以及不同特征的量纲及数值差异带来的部分分类器过拟合等问题。
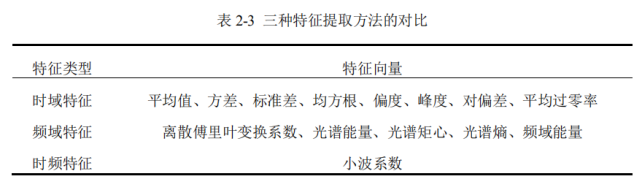
2.特征提取:
时域特征、频域特征、时频特征三种类别特征常用于解决行为识别相关问题.
3.特征选择:
当识别系统选择的特征数量较大时,其特征空间的维数将会变得很高,高维数据的处理不但会增加计算的复杂度,而且各个特征之间的冗余和不相关性也会导致识别率的下降,所以需要在特征提取之后进行特征降维。常见的特征选择算法:
4.分类模型:《基于加速度传感器的游泳监测系统分析与实现》
(1)支持向量机
(2)决策树
(3)随机森林
(4)k 最近邻:
(5)K -means
(6)朴素贝叶斯
(7)神经网络、隐马尔可夫、逻辑回归等等

 浙公网安备 33010602011771号
浙公网安备 33010602011771号