基于单片机高精度PID模糊算法程控电源方案设计
模糊-PID控制技术运用到程控电压源的设计中,从而使得电压源的输出电压值达到预定的要求,提高输出电压的精度和反应速度。
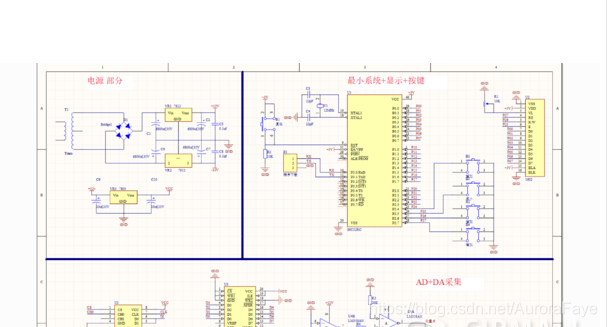
采用51单片机,利用adc0832和DAC0832,通过220V市电通过整流得到 12V再由12V转5V。LM358搭配DAC0832电路实现电压的输出。通过ADC采集。
最终得到电压。
1:电压的整定时间小于0.5S
2:电压的精确度再0.02以内
3:论文中涉及到第二种硬件设计方案,使用更高精度的采集。

typedef struct{
float Kp;
float Ki;
float Kd;
}PID;
PID fuzzy(int e,int ec)
{
int etemp,ectemp;
int eLefttemp,ecLefttemp;
int eRighttemp ,ecRighttemp;
int eLeftIndex,ecLeftIndex;
int eRightIndex,ecRightIndex;
PID fuzzy_PID;
etemp = e > 3.0 ? 0.0 : (e < - 3.0 ? 0.0 : (e >= 0.0 ? (e >= 2.0 ? 2.5: (e >= 1.0 ? 1.5 : 0.5)) : (e >= -1.0 ? -0.5 : (e >= -2.0 ? -1.5 : (e >= -3.0 ? -2.5 : 0.0) ))));
eLeftIndex = (int)e;
eRightIndex = eLeftIndex;
eLeftIndex = (int)((etemp-0.5) + 3); //[-3,3] -> [0,6]
eRightIndex = (int)((etemp+0.5) + 3);
eLefttemp =etemp == 0.0 ? 0.0:((etemp+0.5)-e);
eRighttemp=etemp == 0.0 ? 0.0:( e-(etemp-0.5));
ectemp = ec > 3.0 ? 0.0 : (ec < - 3.0 ? 0.0 : (ec >= 0.0 ? (ec >= 2.0 ? 2.5: (ec >= 1.0 ? 1.5 : 0.5)) : (ec >= -1.0 ? -0.5 : (ec >= -2.0 ? -1.5 : (ec >= -3.0 ? -2.5 : 0.0) ))));
ecLeftIndex = (int)((ectemp-0.5) + 3); //[-3,3] -> [0,6]
ecRightIndex = (int)((ectemp+0.5) + 3);
ecLefttemp =ectemp == 0.0 ? 0.0:((ectemp+0.5)-ec);
ecRighttemp=ectemp == 0.0 ? 0.0:( ec-(ectemp-0.5));
/*************************************反模糊*************************************/
fuzzy_PID.Kp = (eLefttemp * ecLefttemp * fuzzyRuleKp[ecLeftIndex][eLeftIndex]
+ eLefttemp * ecRighttemp * fuzzyRuleKp[ecRightIndex][eLeftIndex]
+ eRighttemp * ecLefttemp * fuzzyRuleKp[ecLeftIndex][eRightIndex]
+ eRighttemp * ecRighttemp * fuzzyRuleKp[ecRightIndex][eRightIndex]);
fuzzy_PID.Ki = (eLefttemp * ecLefttemp * fuzzyRuleKi[ecLeftIndex][eLeftIndex]
+ eLefttemp * ecRighttemp * fuzzyRuleKi[ecRightIndex][eLeftIndex]
+ eRighttemp * ecLefttemp * fuzzyRuleKi[ecLeftIndex][eRightIndex]
+ eRighttemp * ecRighttemp * fuzzyRuleKi[ecRightIndex][eRightIndex]);
fuzzy_PID.Kd = (eLefttemp * ecLefttemp * fuzzyRuleKd[ecLeftIndex][eLeftIndex]
+ eLefttemp * ecRighttemp * fuzzyRuleKd[ecRightIndex][eLeftIndex]
+ eRighttemp * ecLefttemp * fuzzyRuleKd[ecLeftIndex][eRightIndex]
+ eRighttemp * ecRighttemp * fuzzyRuleKd[ecRightIndex][eRightIndex]);【资源下载】下载地址如下(789):https://docs.qq.com/doc/DTlRSd01BZXNpRUxl

 浙公网安备 33010602011771号
浙公网安备 33010602011771号