
FX3U驱动台达B2伺服位置控制

(1)DPLSY 表示32位脉冲指令
第一个参数 频率
K160 是数据存储器,在这里指的是 脉冲频率,设置160 ,表示每秒发160个脉冲
第二个参数 脉冲数 D0里面储存的是9999
也可以用K设置参数 K表示的是十进制,0 ,表示无数个脉冲数,如果设置为其他的,比如 9999 ,那么发完9999个脉冲就停止
第三个参数 脉冲输出口
由于硬件关系,FX3u所以只能是Y0 或则是 Y1和Y2 ,根据PLC型号来决定的。
(2)设置伺服参数
P1-00 设为2 表示 脉冲+方向控制方式
P1-01 设为00 表示位置控制模式
P1-32 设为0 表示停止方式为立即停止
P1-37 初始值10,表示负载惯量与电机本身惯量比,在调试时自动估算。
P1-44 电子齿轮比分子 默认参数 16 测试伺服用的是出厂参数,没有改动
P1-45 电子齿轮比分母 默认参数 10
如果电子齿轮比均为1:1的情况下
AB系列伺服为10000脉冲/圈
ASDA-B2系列支持17bit(160000 ppr)/圈
A2系列伺服为1280000脉冲/圈
P2-17 DI7输入引脚默认参数是 21为常闭,是紧急停车, 如果此引脚未接线,要设置成121为常开,伺服才可以使能。
(3)台达B2伺服驱动程序
x5接通每秒发送20000脉冲给伺服41引脚,伺服电机正转。
x6接通发送脉冲,并且Y1给伺服37脚置位,伺服电机反转。

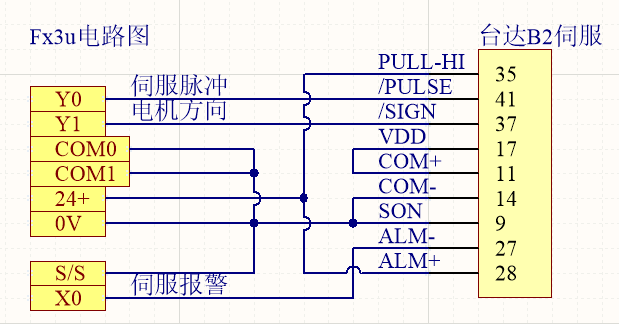
(4)下面是电气连接图
SON直接短接,上电默认伺服使能。
伺服报警输出接到X0

 浙公网安备 33010602011771号
浙公网安备 33010602011771号