WebGL模型拾取——射线法二
这篇文章是对射线法raycaster的补充,上一篇文章主要讲的是raycaster射线法拾取模型的原理,而这篇文章着重讲使用射线法要注意的地方。首先我们来看下图。
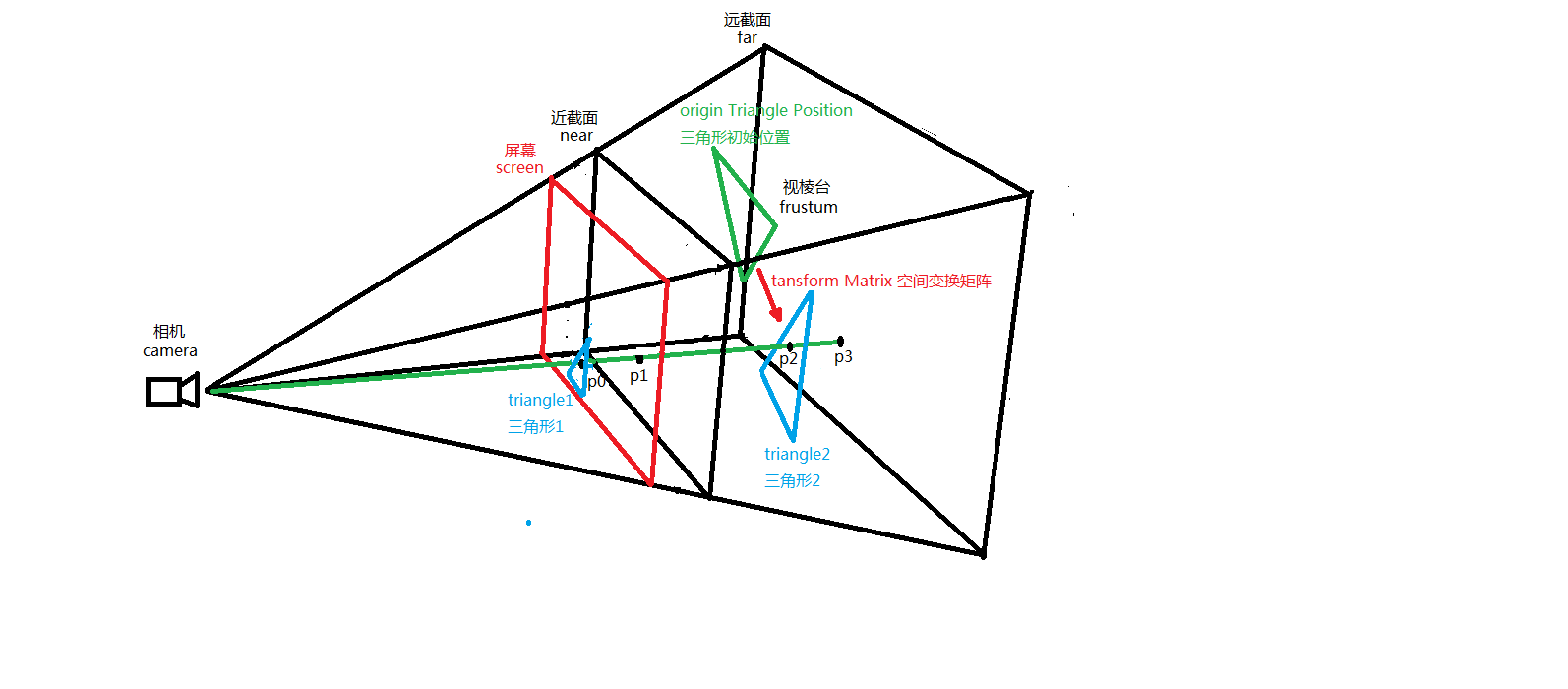
我来解释一下上图中的originTriangle,这就是Triangle2三角形第一次绘制在空间中的位置,而Triangle2当前的位置是经过一系列空间变换而来的(这些位置姿态变换大多是由用户鼠标交互产生),变换矩阵就是transformMatrix。这下就引出了本文第一个重点,那就是做raycaster的时候要保证线段碰撞模型的时候一定是模型当前所处的空间位置,即已经做过transformMatrix空间(姿态,位置)变换,否则线段如果和模型之前的初始化位置求交显然没有交点,就拾取失败了。这就是做raycaster要注意的第一个重点,即射线一定要和空间变换后的模型求交。
接下来我们再看一张图,请看下图。
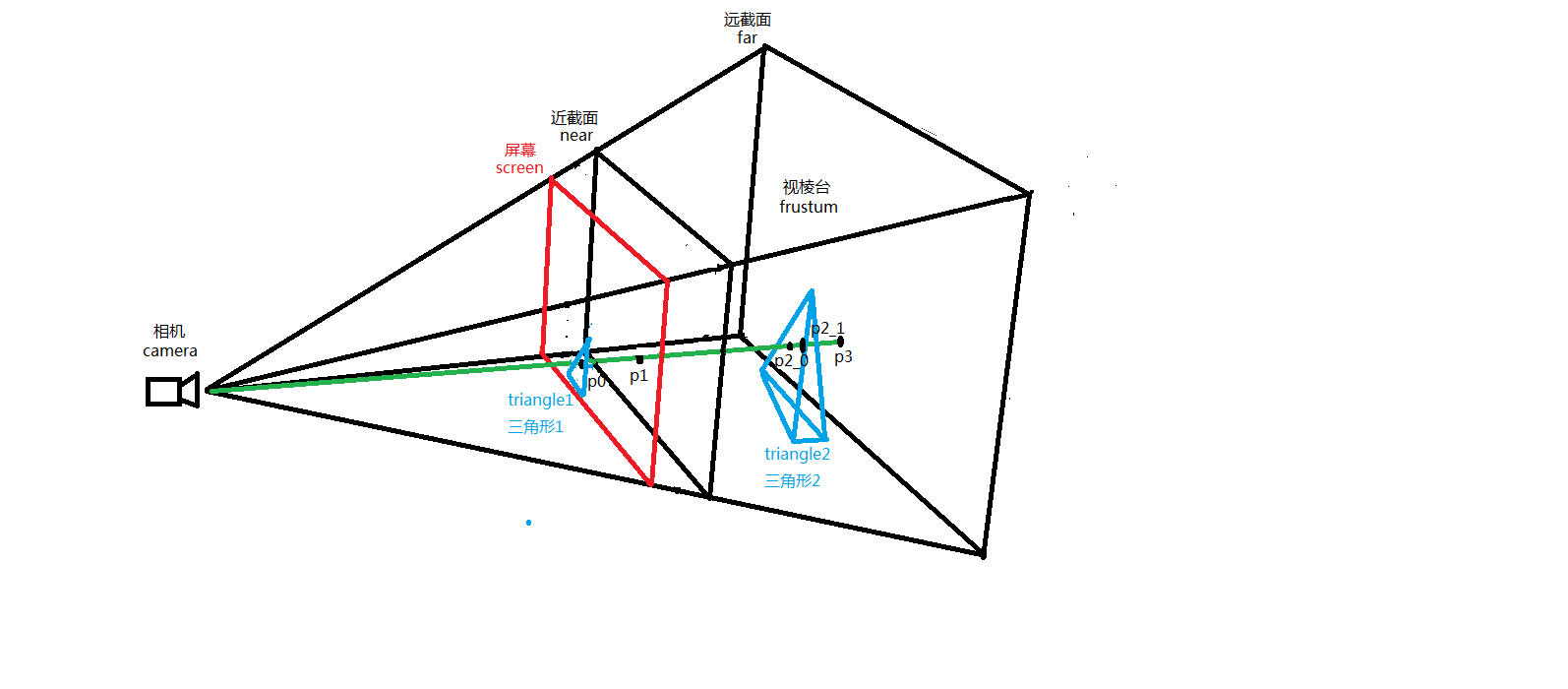
我们看到,射线和模型有2个交点,P2_0和P2_1,分别交四面体的前面于P2_0和交四面体的后面于P2_1。这就是我们要着重关注的本文第二个重点,即raycaster射线拾取模型过程中射线与单个模型有多个交点的问题。处理这个问题其实有很多办法,这里我们采用最简单的方式,就是距离相机(人眼)位置近者胜出的策略。计算交点的算法上一篇文章已经提到,这里不再赘述,但要说明的是,我们计算的每一个面在数据结构中都有自身模型父节点geometry,如果像上图一个四面体的geometry和射线产生了多个面相交,那我们就认为鼠标选中的是该模型geometry离相机(camera)(人眼)最近的交面上的交点。
对于上面2点的叙述,配合部分代码展示,是geometry空间变换的,代码如下。
Object.assign(CubeSection.prototype, { //重载,每一帧同步数据 sync: function () { if(this._mode === "face") {//根据剖切模式管理鼠标拖拽逻辑 if (this._selectFace) { let camera = this._viewer.getMainCamera(); let last = this._mousePoints.getLast(); let lastX = camera.getNormalizedX(last[0]); let lastY = camera.getNormalizedY(last[1]); let current = this._mousePoints.getCurrent(); let currentX = camera.getNormalizedX(current[0]); let currentY = camera.getNormalizedY(current[1]); this._mousePoints.sync(); let deltaX = currentX - lastX; let deltaY = currentY - lastY; if (Math.abs(deltaX) < Algorithm.EPSILON && Math.abs(deltaY) < Algorithm.EPSILON) return; //如果面被选中,并且有移动量,需要进行剖切面移动处理 let start = Vec3.MemoryPool.alloc(); let end = Vec3.MemoryPool.alloc(); camera.computeScreenToWorldNearFar(lastX, lastY, start, end, true); //获取起点与平面的交点 let plane = this._cubeClip.getClipPlane(this._selectFace.getName()); let planePt1 = Vec3.MemoryPool.alloc(); if (Plane.intersectLine(planePt1, start, end, plane)) { //将模型交点再转换到屏幕坐标上,主要为了获取z值给终点 let temppt = Vec3.MemoryPool.alloc(); camera.computeWorldToScreen(planePt1, temppt); Vec3.set(temppt, currentX, currentY, temppt[2]); let planePt2 = Vec3.MemoryPool.alloc(); camera.computeScreenToWorld(temppt, planePt2); Vec3.sub(temppt, planePt2, planePt1); let dist = Vec3.dot(plane, temppt); this.move(dist); Vec3.MemoryPool.free(planePt2); Vec3.MemoryPool.free(temppt); } Vec3.MemoryPool.free(planePt1); Vec3.MemoryPool.free(start); Vec3.MemoryPool.free(end); } } else if(this._mode === "translate"){ if(this._selectAxis) { let camera = this._viewer.getMainCamera(); let last = this._mousePoints.getLast();//前一帧鼠标的XY坐标 let lastX = camera.getNormalizedX(last[0]); let lastY = camera.getNormalizedY(last[1]); let current = this._mousePoints.getCurrent();//目前帧鼠标的XY坐标 let currentX = camera.getNormalizedX(current[0]); let currentY = camera.getNormalizedY(current[1]); this._mousePoints.sync();//继续下一帧同步鼠标XY坐标 let deltaX = currentX - lastX;//X偏移量 let deltaY = currentY - lastY;//Y偏移量 if (Math.abs(deltaX) < Algorithm.EPSILON && Math.abs(deltaY) < Algorithm.EPSILON) { //如果XY偏移量都为零,就直接返回,什么操作都不做 return; } //坐标系轴被选中,并且有偏移量,就要移动整个包围盒子 let start = Vec3.MemoryPool.alloc(); let end = Vec3.MemoryPool.alloc(); //把屏幕上的XY坐标换算到视棱台near,far截面上的XY坐标 camera.computeScreenToWorldNearFar(lastX, lastY, start, end, true); //当前pick的坐标轴 let axis = this._selectAxis; //near-far线段截axis坐标轴的交点 let intersectPoint1 = Vec3.MemoryPool.alloc(); //射线碰撞 let intersections = this._drawActor.linesegmentIntersect(start, end);//对场景中的所有物体进行线段碰撞检测 //遍历intersections列表,按照离相机从远到近排列 for (let i = 0; i < intersections.length; i++) { let geometry = intersections[i].getDrawable().getGeometry(); if (geometry && new String(geometry._name).substring(0, 4) === "axis") { intersectPoint1 = intersections[i]._point;//获取到near-far线段和坐标轴的交点 break; } } //将near-far和坐标轴的交点再转换到屏幕坐标上,主要为了获取z值给终点 let screenPoint = Vec3.MemoryPool.alloc(); camera.computeWorldToScreen(intersectPoint1, screenPoint); //screePoint(currentX, currentY, screenPoint.z) Vec3.set(screenPoint, currentX, currentY, screenPoint[2]); //鼠标移动的第二个场景坐标系里的点坐标 let intersectPoint2 = Vec3.MemoryPool.alloc(); //把屏幕归一化坐标转化为场景世界坐标 camera.computeScreenToWorld(screenPoint, intersectPoint2); Vec3.sub(screenPoint, intersectPoint2, intersectPoint1); let dist = 0; if(this._selectAxis._name === "axisX"){ dist = screenPoint[0]; }else if(this._selectAxis._name === "axisY"){ dist = screenPoint[1]; }else if(this._selectAxis._name === "axisZ"){ dist = screenPoint[2]; } this.move(dist); //析构向量 Vec3.MemoryPool.free(intersectPoint1); Vec3.MemoryPool.free(intersectPoint2); Vec3.MemoryPool.free(screenPoint); Vec3.MemoryPool.free(start); Vec3.MemoryPool.free(end); } } else if(this._mode === "rotate"){ } else if(this._mode === "scale"){ } },
updateTransform: function () { let mat = this._cubeRoot.getMatrix(); //重新计算坐标系模型的_matrix this._coordinateSection.update(this._clipBox, this._scale, this._translate, this._rotate, this._scaleMatrix, this._translateMatrix, this._rotateMatrix, mat); Mat4.fromScaling(this._scaleMatrix, this._scale); Mat4.fromTranslation(this._translateMatrix, this._translate); Mat4.fromQuat(this._rotateMatrix, this._rotate); Mat4.mul(mat, this._translateMatrix, this._rotateMatrix); Mat4.mul(mat, mat, this._scaleMatrix); //剖切面数据的变换 this._cubeClip.resetClipPlane(); this._cubeClip.transformClipPlane(mat); //包围盒子更新 this._clipBox.setMaxValue(0.5, 0.5, 0.5); this._clipBox.setMinValue(-0.5, -0.5, -0.5); this._clipBox.transformMat4(mat); },
接下来是选取离相机近的交点,代码如下
//拾取物体,根据当前剖切模式选择intersections列表中的碰撞对象 pick: function (x, y) { let camera = this._viewer.getMainCamera(); let start = Vec3.MemoryPool.alloc(); let end = Vec3.MemoryPool.alloc(); camera.computeScreenToWorldNearFar(x, y, start, end); let intersections = this._drawActor.linesegmentIntersect(start, end); let l = intersections.length; if (l !== 0) { switch(this._mode){ case "face" : {//面剖切 let intersection = intersections[0];//LineSegmentIntersection let geometry = intersection.getDrawable().getGeometry(); if (geometry) { this._selectFace = geometry; this._selectFace.setStateSet(this._selectState); return true; } } case "translate" : {//平移剖切 //遍历intersections列表,按照离相机从远到近排列 for(var i=0; i<l; i++){ let geometry = intersections[i].getDrawable().getGeometry(); if(geometry && new String(geometry._name).substring(0, 4) === "axis"){ this._selectAxis = geometry; this._selectAxis.setStateSet(this._selectStateAxis); break; } } return true; } case "rotate" : {//旋转剖切 //遍历intersections列表,按照离相机从远到近排列 for(var i=0; i<l; i++){ let geometry = intersections[i].getDrawable().getGeometry(); if(geometry && new String(geometry._name).substring(0, 4) === "face"){ this._selectAxisFace = geometry; this._selectAxisFace.setStateSet(this._selectStateAxisFace); break; } } return true; } case "scale" : {//缩放剖切 //遍历intersections列表,按照离相机从远到近排列 for(var i=0; i<l; i++){ let geometry = intersections[i].getDrawable().getGeometry(); if(geometry && new String(geometry._name).substring(0, 4) === "axis"){ this._selectAxis = geometry; this._selectAxis.setStateSet(this._selectStateAxis); break; } } return true; } } } return false; },
其中intersections[]交点列表是按照离相机由远到近距离排序的,intersection[i]交点离相机距离比intersection[i+1]交点离相机距离要近。这就是我们采取的离相机近交点胜出原则。
好了,以上就是raycaster射线拾取模型要注意的地方,如有错误,希望读者斧正,欢迎诸位同学留言。如需转载本文,请注明出处:https://www.cnblogs.com/ccentry/p/9977490.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号