

openCV 简单实现身高测量(未考虑相机标定,windows)
(一) OpenCV3.1.0+VS2015开发环境配置
- 下载OpenCV安装包(笔者下载3.1.0版本)
- 环境变量配置(opencv安装路径\build\x64\vc14\bin,注意的是x64文件夹下分为vc12和vc14两个文件夹,他们对应于VS的版本,vc8 = Visual Studio 2005,vc9 = Visual Studio 2008,vc10 = Visual Studio 2010,vc11 = Visual Studio 2012,vc12 = Visual Studio 2013,vc14 = Visual Studio 2015)
- VS2015配置。进入属性管理器(View—>Other Windows—>Property Manger,展开目录,选中Debug|Win64中的Microsoft.Cpp.x64.user,并右键点击属性(Properties)进入属性界面。)
- 包含目录配置(通用属性(Common Properties)—>VC ++目录—>包含目录(Include Directories))。添加路径:D:\Code\C\opencv\build\include;D:\Code\C\opencv\build\include\opencv;D:\Code\C\opencv\build\include\opencv2
- 配置库文件目录(Library Directories)。D:\Code\C\opencv\build\x64\vc14\lib(注意VS版本)
- 配置动态链接库(Linker(链接库)—>Input(输入)—>Additional Dependencies(添加依赖))。D:\Code\C\opencv\build\x64\vc12\bin路径下的。opencv_world310.lib和opencv_world310d.lib,这里两个库文件的区别就是:opencv_world310.lib是Release模式版本,而opencv_world310d.lib是Debug模式版本。
(二)算法思路
- HOG特征提取获得定位矩形框,笔者使用SVM分类优化+多尺度检测获得带有矩形框的dst
/******************************HOG detector************************************************/ dst = src.clone(); vector<Rect> findrects, findrect; HOGDescriptor HOG; //SVM分类器 HOG.setSVMDetector(HOGDescriptor::getDefaultPeopleDetector()); //多尺度检测 HOG.detectMultiScale(src, findrects, 0, Size(4, 4), Size(0, 0), 1.05, 2); //若rects有嵌套,则取最外面的矩形存入rect for (int i = 0; i < findrects.size(); i++) { Rect rect = findrects[i]; int j = 0; for (; j < findrects.size(); j++) if (j != i && (rect & findrects[j]) == rect) break; if (j == findrects.size()) findrect.push_back(rect); } Rect r;//用来选中所测图像中的测量对象。 r.height = -1; //框选出检测结果并选中图片测量对象 for (int i = 0; i < findrect.size(); i++) r = r.height > findrect[i].height ? r : findrect[i]; //HOG detector返回的矩形框比真正图像轮廓大,所以我们减少矩形框的大小来使得更符合外界边框 r.x += cvRound(r.width*0.1); r.width = cvRound(r.width*0.8); r.y += cvRound(r.height*0.07); r.height = cvRound(r.height*0.8); Scalar color = Scalar(0,0,255); rectangle(dst, r.tl(), r.br(), color, 2); // imshow("src", src); // imshow("dst", dst);
原图像和得到的dst图像


- Grabcut算法分割
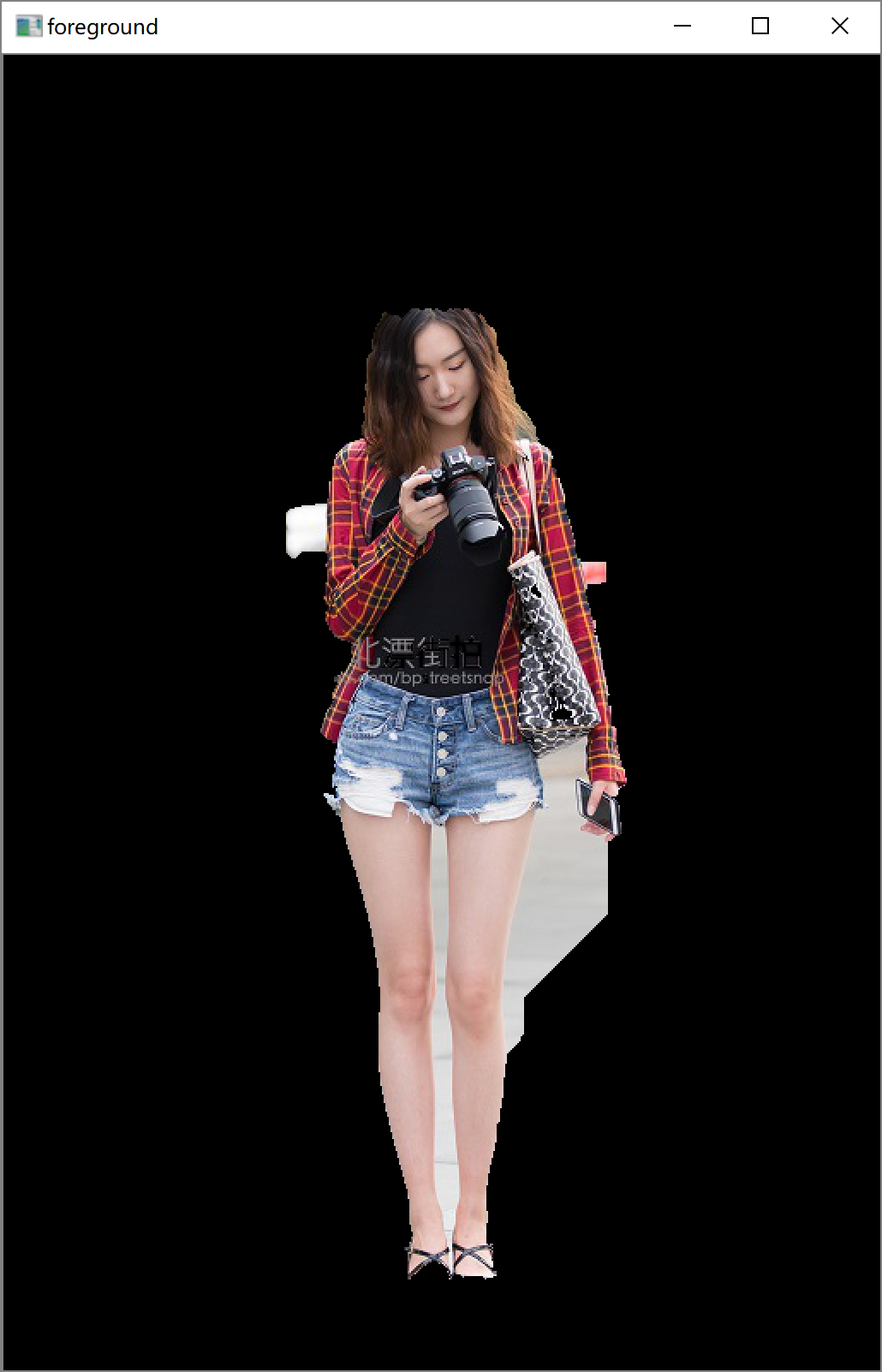
/********************************grabCut**********************************************/ cv::Mat mask = Mat::zeros(src.size(), CV_8UC1);//分割后的结果 //两个临时矩阵变量,作为算法的中间变量使用 cv::Mat bgModel, fgModel; cv::Rect rectangle(r.tl(),r.br());//图像的前景对象也就是矩形选中图像 // GrabCut 分段 cv::grabCut(src, //输入图像 mask, //分段结果 rectangle,// 包含前景的矩形 bgModel, fgModel, // 前景、背景 1, // 迭代次数 cv::GC_INIT_WITH_RECT); // 用矩形 // 得到可能是前景的像素 //比较函数保留值为GC_PR_FGD的像素 cv::compare(mask, cv::GC_PR_FGD, mask, cv::CMP_EQ); // 产生输出图像 cv::Mat foreground(src.size(), CV_8UC3, cv::Scalar(0, 0, 0)); //背景值为 GC_BGD=0,作为掩码 src.copyTo(foreground, mask); imshow("foreground", foreground);
处理后图像
- BorderMatting边缘细化处理(由于版权问题,没有相应接口需自己编写)主要思想:把前景颜色值与估计值对比,选择较小的差异值颜色代替,使得平滑最好
/********************************BorderMatting**********************************************/ BorderMatting bm; Mat rst = Mat(src.size(), src.type()); Mat rstBm; src.copyTo(rst); for (int i = 0; i<rst.rows; i++) for (int j = 0; j < rst.cols; j++) { if (mask.at<uchar>(i, j) == 0) rst.at<Vec3b>(i, j) = Vec3b(255, 255, 255); } bm.Initialize(src, mask); rstBm=bm.Run(); imshow("bordingmatting", rstBm);
笔者自己创建的BorderMatting类。
结果图:


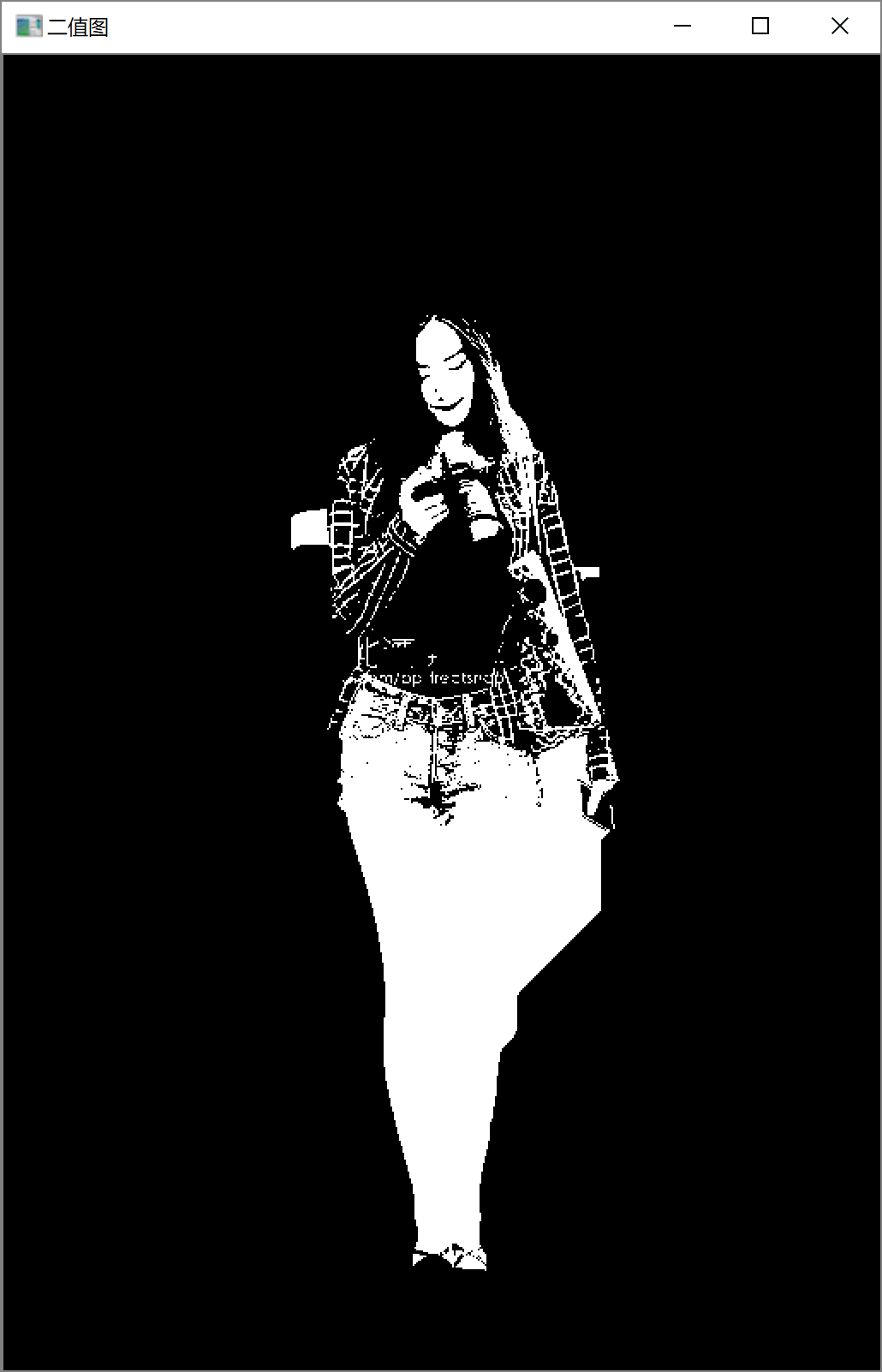
- 灰度化、二值化便于计算
/******************************灰度化、二值化************************************************/ Mat rstGray, rstBin; cvtColor(rstBm, rstGray, CV_BGR2GRAY);//灰度化 // imshow("灰度图", rstGray); threshold(rstGray, rstBin, 100, 255, CV_THRESH_BINARY);//二值化 imshow("二值图", rstBin);
- 最长像素距离计算。笔者一开始用欧氏距离遍历计算得到,结果处理时间过长,就采用最简单的简化方法,最长像素点距离≈最高像素点与最低像素点欧氏距离。
/**********************************计算最长像素距离********************************************/ double MAXPX = 0; int x1 = 0, y1 = 0; int x2 = 0, y2 = 0; int maxX1, maxX2, maxY1, maxY2; int i, j; int flag = 0; for (i = 0; i < rstBin.rows; i++) { for (j = 0; j < rstBin.cols; j++) if (rstBin.at<uchar>(i, j) == 255) { x1 = i; y1 = j; flag = 1; break; } if (flag) break; } flag = 0; for (i = rstBin.rows; i >= 0; i--) { for (j = 0; j < rstBin.cols; j++) if (rstBin.at<uchar>(i, j) == 255) { x2 = i; y2 = j; flag = 1; break; } if (flag) break; } cout << x1 << " " << y1 << endl; cout << x2 << " " << y2 << endl; line(src, Point(y1, x1), Point(y2, x2), Scalar(0, 0, 255), 3); /* for ( i = 1; i <= rstBin.rows*rstBin.cols; i++)//第一个像素点开始遍历 { x1 = i / rstBin.rows; y1 = !x1 ? (i - 1) : (i % x1 - 1); if (rstBin.at<uchar>(x1, y1) == 0) continue; for ( j = i + 1; j <= rstBin.rows*rstBin.cols; j++) { x2 = j / rstBin.rows; y2 = !x2 ? (j - 1) : (j % x2 - 1); if (rstBin.at<uchar>(x2, y2) == 255)//同为白色像素点时计算距离 { double distance=abs(x2 - x1) +abs(y2 - y1);//避免欧氏距离计算浪费时间 if (MAXPX < distance) { maxX1 = x1; maxX2 = x2; maxY1 = y1; maxY2 = y2; MAXPX = distance; } } } } */ /*MAXPX = sqrt((maxX1 - maxX2)*(maxX1 - maxX2) + (maxY1 - maxY2)*(maxY1 - maxY2)); cout << MAXPX << endl; cout << maxX1 << " " << maxY1 << endl; cout << maxX2 << " " << maxY2 << endl; line(src, Point(maxY1, maxX1), Point(maxY2, maxX2), Scalar(0, 0, 255), 3); */imshow("final", src);
注意像素点坐标顺序。结果如下

像素与毫米的转换 转换还需要知道另一个参数:PPI(每英寸多少像素) 象素数 / PPI = 英寸数 英寸数 * 25.4 = 毫米数
笔者 设定系统参数焦距(3.5mm)不会变动(图为35mm焦距所拍),物距1.1m,ppi:400(笔者电脑PPI260)
那么身高大概为:({[((709-152)^2+(281-247)^2)^0.5]/260}*25.4/35)*1.1≈1.71m
