
锐度:它是什么以及如何测量
锐度:它是什么以及如何测量
| 测量 锐度 | 调制传递 函数 | 空间 频率单位_ | 汇总 指标 | MTF 测量 矩阵 | 斜边 |
|---|
测量锐度
清晰度决定了成像系统可以再现的细节量。它由不同色调或颜色的区域之间的边界定义。

图 1. 条形图案:原始(图的上半部分)镜片退化(图的下半部分)
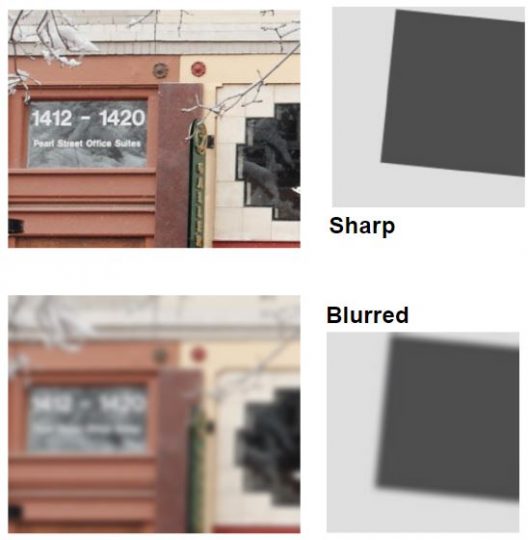
图 2. 来自MTF 曲线和图像外观的图像边缘的清晰度示例
在图 1 中,锐度用空间频率增加的条形图案来说明。图形的顶部清晰,边界清晰;下半部分是模糊的,并说明了条形图案在通过模拟镜头后是如何退化的。
注意:所有镜头都会在一定程度上模糊图像。
清晰度在图像边缘(图 2)等特征上最为明显,可以通过边缘(阶跃)响应来测量。
有几种方法用于测量清晰度,包括 10-90% 上升距离技术、调制传递函数 (MTF)、特殊域和频域以及斜边算法。
上升距离和频域
图像清晰度可以通过图像内边缘的“上升距离”来衡量。
使用这种技术,清晰度可以通过像素级在其最终值的 10% 到 90% 之间的距离来确定(也称为10-90% 上升距离;参见图 3)。
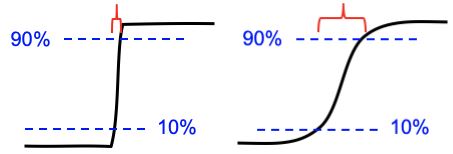
图 3. 模糊和锐利边缘 10-90% 上升距离的图示
上升距离没有被广泛使用,因为没有方便的方法可以根据其各个组件(即镜头、数字传感器和软件锐化)的上升距离来计算成像系统的上升距离。
为了克服这个问题,在频域中 进行测量,其中频率以每距离(毫米、英寸、像素、图像高度或有时角度 [度或毫弧度])为单位的周期或线对来测量。
在频域中,可以通过组合由以周期或频率表征的纯音(正弦波)组成的信号来创建复杂信号(音频或图像)(图 4)。一个完整系统的响应是每个组件响应的乘积。
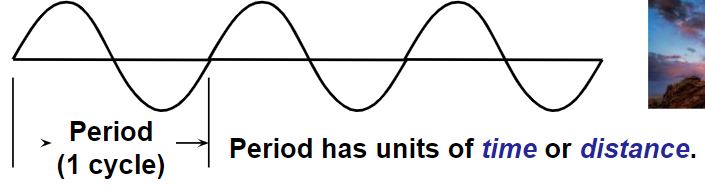
图 4. 周期定义(1/频率)
频域和空间域通过傅里叶变换相关联。
- 高频(短周期)的系统响应越大,系统可以传达的细节就越多(图 5)。系统响应可以通过频率响应曲线F(f)来表征。
注意:高频对应精细的细节。
调制传递函数
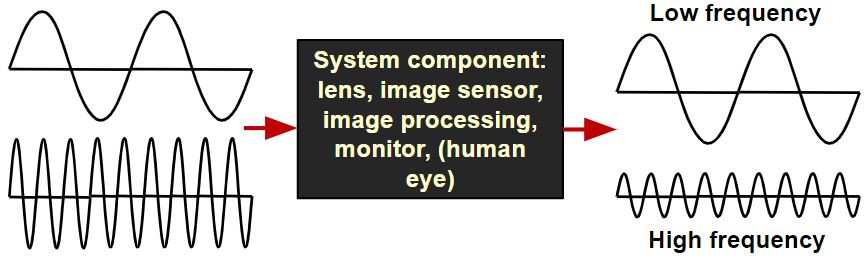
图 5. 高频对应空间和频域的精细细节
给定空间频率下的相对对比度(输出对比度/输入对比度)称为调制传递函数( MTF ),类似于空间频率响应(SFR),是衡量清晰度的关键。在图 6 中,MTF 用正弦和条形图案、幅度图和对比图来说明——每一个都具有从左到右连续增加的空间频率。
注意:Imatest 可互换使用 SFR 和 MTF。SFR 更常与完整的系统响应相关联,而 MTF 通常与特定组件的单个效应相关联。换言之,系统SFR相当于成像系统中各部件的MTF的乘积。
高空间频率(右侧)对应于精细的图像细节。摄影组件(胶片、镜头、扫描仪等)的响应往往在高空间频率下“滚降”。这些组件可以被认为是通过低频并衰减高频的低通滤波器。
图 6. 正弦和条形图、幅度图和对比度 (MTF) 图
图 6 由上图、中图和下图组成,描述如下:
- 条形图案、正弦图案(上图)- 上图说明 (1) 原始正弦图案、(2) 带有镜头模糊的正弦图案、(3) 原始条形图案和 (4) 带有镜头模糊的条形图案. 请注意,镜头模糊会导致对比度在高空间频率下下降。
- 幅度(中间图)—中间图显示了带有镜头模糊的条形图案的亮度(MTF 方程部分中的“调制” V )(参见图 6 中的红色曲线)。由纯频率组成的正弦模式的调制用于计算 MTF。(请注意,在高空间频率下对比度会降低。)
- MTF %(下图)- 下图显示了相应的正弦模式对比度(见 蓝色曲线;代表 MTF),这也在MTF 方程部分中定义。根据定义,低频 MTF 限制始终为 1 (100%)。在图 6 中,MTF 在 61 lp/mm(每毫米线对)时为 50%,在 183 lp/mm 时为 10%。请注意,频率和 MTF 都以指数符号 [10 0 = 1%; 10 1 = 10%;10 2 = 100% 等];幅度(中间图)以线性刻度显示。完整成像系统的 MTF 是其各个组件的 MTF 的乘积。
MTF方程
MTF 的方程是从 空间频率 f处的正弦图案对比度C(f)推导出来的,其中
<span id="MathJax-Span-70" class="mrow"><span id="MathJax-Span-71" class="mstyle"><span id="MathJax-Span-72" class="mrow"><span id="MathJax-Span-73" class="mi"><span><span>C( f) =五米× _-五我_ _五米× _+五我_ _ 用于亮度(“调制”) V。
<span id="MathJax-Span-112" class="mrow"><span id="MathJax-Span-113" class="mstyle"><span id="MathJax-Span-114" class="mrow"><span id="MathJax-Span-115" class="mi"><span><span>米吨F( f) = 100 % ×C( f)C( 0 ) 注意:这会将低空间频率下的 MTF 归一化为 100%。
为了在低空间频率下正确归一化 MTF,测试图必须具有一些低频能量。这是由倾斜边缘中的大亮和暗区域以及 Imatest 使用的大多数图案中的特征提供的,但在线条和网格中不存在。对于可以控制锐化的系统,推荐的主要MTF 计算是倾斜边缘,它是从脉冲响应(即对窄线的响应)的傅里叶变换计算得出的,它是导数( d/dx或d /dy ) 的边缘响应。幸运的是,您无需了解傅立叶变换即可了解 MTF。
传统分辨率测量
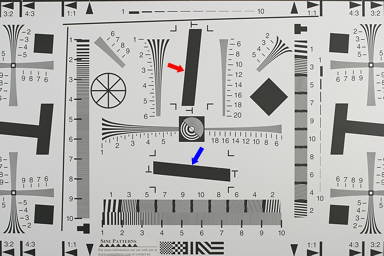
传统的分辨率测量包括观察条形图案的图像,最常见的是 USAF 1951 图表(图 7),并估计条形图案明显不同的最高空间频率 (lp/mm)。这种观察(也称为消失分辨率)对应于大约 10-20% 的 MTF。因为消失的分辨率是图像信息消失的空间频率——在它 不 可见的地方,它强烈依赖于观察者的偏差,并且是图像清晰度的不良指标。
注意:USAF 1951 图表(很久以来被空军放弃)不太适合计算机分析,因为它使用空间效率低,并且它的条形三连音缺乏低频参考。此外,图表位置(采样阶段)的微小变化会导致其条形的外观发生变化,因为它们从与像素阵列同相变为异相。这会对消失分辨率估计产生不利影响。
图 7. USAF 1951 图表;Imatest 不支持
更好的图像清晰度指标是空间频率,其中 MTF 是其低频值 (MTF50) 的 50% 或峰值 (MTF50P) 的 50%。推荐使用 MTF50 和 MTF50P 来比较不同相机和镜头的锐度,因为
- 图像对比度是其低频或峰值的一半,因此细节仍然很明显。(眼睛对 MTF 为 10% 或更低的空间频率的细节不敏感。)
- 大多数相机的响应在 MTF50 和 MTF50P 附*迅速下降。MTF50P 是强烈锐化相机的更好指标(在我们的电子成像 2020 论文中进行了解释)。
- 50%的水*与图像的信息容量有关。
尽管可以直接从正弦模式的图像(使用 Rescharts、Log Frequency、 Log F-Contrast和 Star Chart)估计 MTF,但ISO 12233 斜边技术提供了更准确和可重复的结果,并且更有效地利用了空间。 倾斜边缘图像可以通过以下MTF 测量矩阵中列出的模块之一进行分析。
空间频率单位
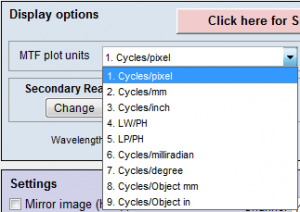
图 8. 在 SFR 和 Recharts 模块(SFRplus、eSFR ISO、Star 等)的设置或更多设置窗口中选择空间频率单位。
大多数读者都熟悉时间频率。例如,声音的频率(以周期/秒或赫兹为单位)与其感知的音高密切相关。无线电传输的频率(以千赫、兆赫和千兆赫为单位)也很熟悉。
空间频率以每距离的周期(或线对)而不是时间来衡量。与时间(例如,音频)频率响应一样,响应越扩展,可以传达的细节就越多。
空间频率单位可以从SFR 和 Rescharts 模块(SFRplus、eSFR ISO、Star等图 8)的“设置”或“更多设置”窗口中选择,并且是用于确定相机可以再现多少细节或像素的好坏的测量被利用。
过去的胶片相机镜头测试使用每毫米线对 (lp/mm),这对于比较镜头非常有效,因为大多数 35mm 胶片相机具有相同的 24 x 36mm 图像尺寸。但数字传感器尺寸差异很大——从可拍照手机的对角线不到 5 毫米到全画幅相机的 43 毫米对角线,再到中画幅的更大对角线。出于这个原因,建议使用每图片高度的线宽 (LW/PH) 来测量相机可以再现的总细节。请注意,LW/PH 等于 2 × lp/mm ×(图片高度,单位为 mm)。
另一个有用的空间频率单位是每像素周期 (C/P),它表示单个像素的利用程度。单位的选择还受图像(传感器)或物体上的性能是否具有首要重要性的影响:请参阅比较不同相机的清晰度。无需使用数码相机的实际距离(毫米或英寸),尽管可以使用此类测量值(表 1)。
表 1. 空间频率单位汇总,以及在选定频率单位中引用 MTF 的方程。
| 机动特遣队单位 | 应用 | 方程 |
|
周期/像素 (C/P) |
显示像素的使用情况。奈奎斯特频率f Nyq始终为 0.5 C/P。 | |
|
循环/距离 (循环/毫米或循环/英寸) |
传感器上每距离的循环次数。必须输入像素间距或间距。用于比较过去标准胶片格式的分辨率(例如,24x36mm 用于 35mm 胶片)很流行。 | <span id="MathJax-Span-137" class="mrow"><span id="MathJax-Span-138" class="mfrac"><span id="MathJax-Span-139" class="mrow"><span id="MathJax-Span-140" class="mi"><span><span>米吨F( C/ P)像素间距 |
|
线宽/图片高度 (LW/PH) 注意:对于裁剪的图像,在更多设置尺寸输入中输入原始图片高度 |
测量整体图像清晰度。这是比较具有不同传感器尺寸和像素数的相机性能的最佳单位。线宽是电视测量的传统方法。推荐用于比较不同相机的锐度中以图像为中心的应用。 请注意,1 个周期 = 1 个线对 (LP) = 2 个线宽 (LW)。 |
<span id="MathJax-Span-152" class="mrow"><span id="MathJax-Span-153" class="mn"><span><span>2&nbsp;×米吨F(LP _磷H) ; <span id="MathJax-Span-176" class="mrow"><span id="MathJax-Span-177" class="mn"><span><span>2&nbsp;×米吨F(C磷) ×PH |
|
线对/图片高度 (LP/PH) 注意:对于裁剪的图像,在更多设置尺寸输入中输入原始图片高度 |
测量整体图像清晰度。与 LW/PH 相差 2 倍。由 dpreview.com 使用。 | <span id="MathJax-Span-199" class="mrow"><span id="MathJax-Span-200" class="mi"><span><span>米吨F(长宽_磷H) /2 ; <span id="MathJax-Span-225" class="mrow"><span id="MathJax-Span-226" class="mi"><span><span>米吨F(C磷) ×PH |
|
角频率 周期/毫弧度 |
角频率。必须输入像素间距或间距。以毫米为单位的焦距 ( FL ) 通常包含在商业图像文件的 EXIF 数据中。如果它不可用,则必须手动输入,通常在设置窗口底部的 EXIF 参数区域中。如果缺少像素间距或焦距,单位将默认为 Cycles/Pixel。 FL可以从简单的镜头方程*计算,其中s 1是镜头到图表的距离(易于测量),s 2是镜头到传感器的距离, 放大倍率。<span id="MathJax-Span-246" class="mrow"><span id="MathJax-Span-247" class="mn"><span><span>1&nbsp;/楼L = 1 /s1+ 1 /s2<span id="MathJax-Span-270" class="mrow"><span id="MathJax-Span-271" class="mi"><span><span>米=s2/s1 <span id="MathJax-Span-283" class="mrow"><span id="MathJax-Span-284" class="mi"><span><span>F大号=s1/ (1+1 / |米| )= s2/ (1+ |米| ) *除非s 1 >> s 2(乘以 100 倍或更多),否则镜头几何形状(s 1、s 2和FL)对于计算M是不可靠的, 因为镜头可能会 明显偏离简单的镜头方程。 |
<span id="MathJax-Span-329" class="mrow"><span id="MathJax-Span-330" class="mn"><span><span>0.001&nbsp;× M吨F(循环毫米) ×F长(毫米) |
|
周期/度 |
<span id="MathJax-Span-355" class="mrow"><span id="MathJax-Span-356" class="mfrac"><span id="MathJax-Span-357" class="mi"><span><span>&pi;180×米吨F(循环毫米) ×F长(毫米) |
|
|
循环/对象 mm |
被拍摄物体上每距离的循环次数(有些人认为是“主题”)。必须输入像素间距和放大倍数,但有一个重要例外*。应在系统规范引用被摄对象时使用(例如,如果需要检测一定宽度的特征)。推荐用于比较不同相机的锐度中的以对象为中心的应用。 *对于输入条间距的SFRplus 、输入配准标记垂直间距时的eSFR ISO或输入正方形长度时的棋盘格,不使用像素间距或输入放大倍数直接计算每对象距离的周期数,即从几何计算。在 Imatest 2021.2 之前,您必须在像素间距字段中输入一个数字,但该数字不用于实际计算。对于造成的混乱,我们深表歉意。 |
<span id="MathJax-Span-383" class="mrow"><span id="MathJax-Span-384" class="mi"><span><span>米吨F(循环距离) ×| 放大倍率| Cycles/distance在图像传感器上是 Cycles/mm 或 Cycles/in 。 |
|
线宽/裁剪高度 |
主要用于在活动图表高度(而不是总图像高度)显着时进行测试。不再推荐,因为它取决于未标准化的作物大小。 | |
|
线宽/特征 Ht(Px) (以前的线宽或线对/N 像素 (PH)) |
When either of these is selected, a Feature Ht pixels box appears to the right of the MTF plot units (sometimes used for Magnification) that lets you enter a feature height in pixels, which could be the height of a monitor under test, a test图表或具有非活动区域的图像中的活动视野。此单位选择对于比较具有不同图像或像素大小的相机的特定对象的分辨率很有用。推荐用于比较不同相机的锐度中的以对象为中心的应用。 |
<span id="MathJax-Span-409" class="mrow"><span id="MathJax-Span-410" class="mn"><span><span>2&nbsp;×米吨F(C磷) ×特征高度 <span id="MathJax-Span-431" class="mrow"><span id="MathJax-Span-432" class="mi"><span><span>米吨F(C磷) ×特征高度 |
|
PH = 图片高度(以像素为单位)。FL (mm) = 镜头焦距,单位为 mm。 像素间距= 每像素距离 = 1/(每距离像素数)。 |
||
比较不同相机的清晰度,建议基于两种广泛应用类型之一的空间频率单位:
-
- 以图像为中心(例如风景摄影,其中图像传感器的细节很重要):建议使用每图片高度的线宽(或线对)。
- 以对象为中心(用于医疗、机器视觉等,其中对象的细节很重要):推荐每个特征高度的周期/对象距离或 LW(或 LP)。
摘要指标
从 MTF 曲线中得出几个汇总指标来表征整体性能。这些指标用于许多显示,包括 SFR/SFRplus/eSFR ISO 边缘/MTF 图(请参阅Imatest 倾斜边缘结果)和 SFRplus 3D 地图中的二次读数。
| 摘要指标 | 描述 | 评论 |
| MTF50 MTF nn |
MTF 为低 (0) 频率 MTF的 50% ( nn %) 的空间频率。MTF50 ( nn = 50) 被广泛使用,因为它对应于电气工程中的带宽(半功率频率)。 | 最常见的汇总指标;与感知锐度密切相关。随着软件锐化的增加而增加;可能会产生误导,因为它“奖励”过度锐化,这会导致边缘可见且可能令人讨厌的“光晕”。 |
| MTF50P MTF nn P |
MTF 为峰值 MTF的 50% ( nn %) 的空间频率。 | 对于中低软件锐化,与 MTF50 相同,但在存在软件锐化峰值(最大 MTF > 1)时低于 MTF50。与 MTF50 相比,对软件锐化的敏感度要低得多(如我们在 Electronic Imaging 2020 上发表的一篇论文所示)。总而言之,一个更好的指标。 |
| MTF面积 归一化 |
MTF 曲线下的面积(低于奈奎斯特频率),归一化为其峰值( 当锐化很少或没有锐化时, f = 0 时为 1,但对于强锐化,峰值可能为 » 1)。 | 一个特别有趣的新指标,因为它密切跟踪 MTF50 很少或没有锐化,但不会增加强烈的过度锐化;即,它不会奖励过度锐化。还是比较陌生的。在倾斜边缘 MTF 测量一致性中进行了描述。 |
| MTF10、MTF10P、 MTF20、MTF20P |
MTF 是零频率或峰值 MTF 的 10% 或 20% 的空间频率 | 这些数字很有趣,因为它们与“消失的分辨率”(瑞利极限)相当。噪音会严重影响 10% 或更低水*的结果。MTF20(或 MTF20P)在 Line Widths per Picture Height (LW/PH) 中最接*模拟TV Lines。有关测量监视器电视线路的详细信息,请参见此处。 |
MTF 测量矩阵——比较不同的图表和测量技术
Imatest有许多测量 MTF 的模式——斜边、对数频率、对数 f 对比度、西门子星、死叶(溢出硬币)、随机 1/f 和双曲线楔形——每种模式在消费类相机中往往给出不同的结果,其中大多数具有不均匀的图像处理——通常是双边滤波——这取决于局部场景内容。锐化(高频提升)趋向于在对比度特征附*最大(在较高对比度边缘附*较大),而降噪(高频削减,可能会掩盖精细纹理)在没有它们的情况下往往最大。出于这个原因,MTF 测量值在不同的测试图上可能会有很大的不同。
原则上,当没有应用非均匀或非线性图像处理(双边滤波)时,MTF 测量值应该是相同的,例如,当使用dcraw 或 LibRaw对图像进行去马赛克且没有锐化和降噪时。但这并不完全发生,因为在所有使用滤色器阵列 (CFA) 的相机中都存在去马赛克,它涉及一些非线性处理。下图总结了不同图案对图像处理的敏感性。
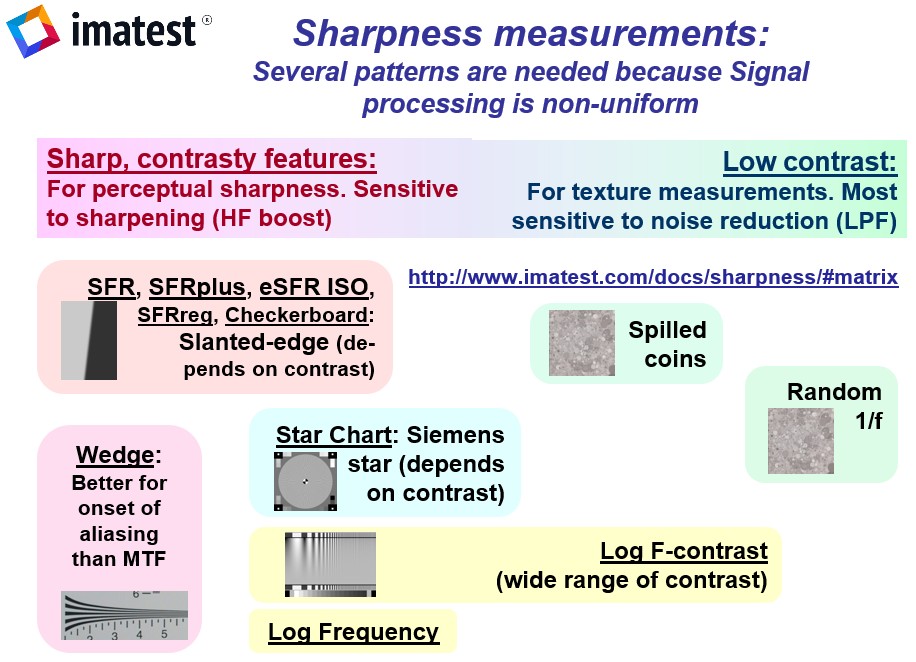 图像处理(双边滤波)对 MTF 测量的影响比较:
图像处理(双边滤波)对 MTF 测量的影响比较:
倾斜边缘和楔形最容易被锐化。
随机 1/f 模式具有最少的锐化和最多的降噪。
下面的 MTF 矩阵表列出了 Imatest 测量 MTF 方法的属性、优点和缺点。
空间频率响应的斜边测量
几个 Imatest 模块使用斜边技术测量 MTF,包括:
- 可以从 Imatest 购买 或使用 Imatest 测试图创建的斜边测试图。推荐使用自动检测的图表(SFRplus、 eSFR ISO、 SFRreg或 Checkerboard)。
- 简而言之,ISO 12233 倾斜边缘方法通过找到*均边缘(使用巧妙的binning 算法进行 4X 过采样)、对其进行微分(以获得线扩展函数 (LSF))并取傅里叶变换的绝对值来计算 MTF LSF。该算法在此处详细描述。
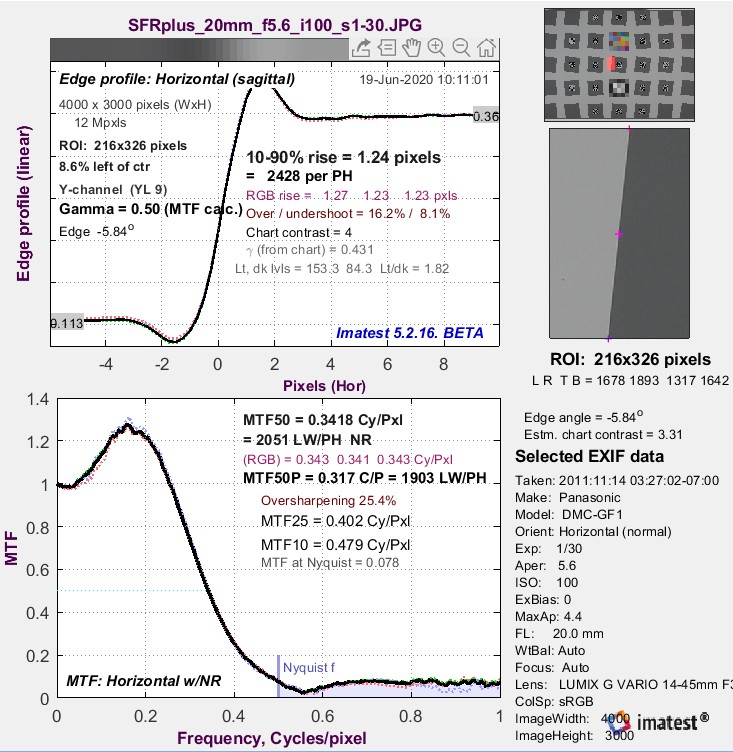
斜边分析的主要输出是Edge/MTF 图,可以通过点击下面的按钮查看。许多其他结果可用,包括摘要和 3D 图,显示横向色差和其他结果以及 MTF。
为什么边缘是倾斜的?
纯垂直或水*边缘的 MTF 结果高度依赖于采样相位(边缘和像素位置之间的关系),因此根据精确的(子像素)边缘位置,每次运行可能会有所不同。边缘是倾斜的,因此 MTF 是根据许多采样阶段的*均值计算的,这使得结果更加稳定和稳健(图 9 )。
什么边角效果最好?
在可能的情况下,边缘角度应与最*的垂直 (V)、水* (H) 或 45 度方向相差大于 ±2 度。原因是垂直、水*和45°边缘的结果对边缘和像素之间的关系非常敏感(即它们是相位敏感的)。将边缘倾斜 2 或 3 度以上可避免此问题。
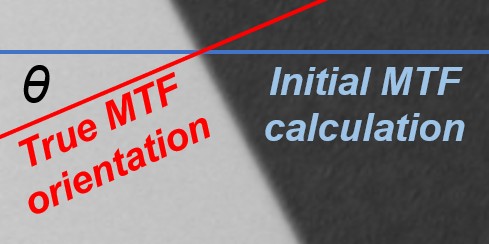 ISO 12233 标准建议角度为 5 或 5.71 度 (arctan(0.1))。这个角度不是神圣的——MTF 并不强烈依赖于边缘角度。3 到 7 度的角度可以正常工作。对于相对于最*的 V 或 H 方向的非零边角θ,应用余弦校正,如右图所示。当θ大于约 8 度 (cos(8º) = 0.99) 时,校正是显着的。根据区域选择,初始 MTF 和相应的频率f是从垂直或水*线(以蓝色显示)计算的。真正的 MTF 被定义为垂直于边缘——沿着红色 线。由于 沿 红线(垂直于边缘)的实际过渡长度比 沿蓝色(V 或 H)线的测量过渡短,并且由于用于测量 MTF 的频率f与实际过渡长度成反比,
ISO 12233 标准建议角度为 5 或 5.71 度 (arctan(0.1))。这个角度不是神圣的——MTF 并不强烈依赖于边缘角度。3 到 7 度的角度可以正常工作。对于相对于最*的 V 或 H 方向的非零边角θ,应用余弦校正,如右图所示。当θ大于约 8 度 (cos(8º) = 0.99) 时,校正是显着的。根据区域选择,初始 MTF 和相应的频率f是从垂直或水*线(以蓝色显示)计算的。真正的 MTF 被定义为垂直于边缘——沿着红色 线。由于 沿 红线(垂直于边缘)的实际过渡长度比 沿蓝色(V 或 H)线的测量过渡短,并且由于用于测量 MTF 的频率f与实际过渡长度成反比,
<span id="MathJax-Span-451" class="mrow"><span id="MathJax-Span-452" class="mi"><span><span>F=F我是我_ _ _ _/ cos(θ)
具有频率单位的相应摘要度量MTFnn(MTF50、MTF50P等)在初始值之上增加。
<span id="MathJax-Span-475" class="mrow"><span id="MathJax-Span-476" class="mi"><span><span>米吨Fn n = M吨Fn n (初始) / c o s ( θ )
大边角的主要缺点是可用区域面积可能会减少,特别是对于SFRreg图案。
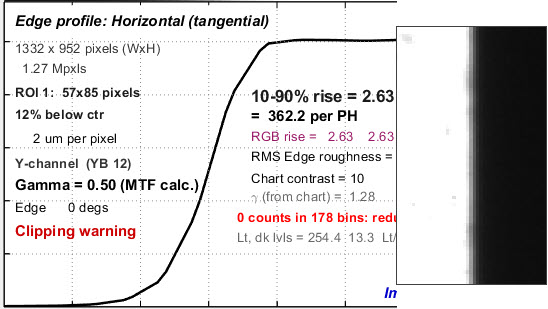
图 9. 裁剪的高对比度垂直边缘(结果无效)
边缘对比度和剪裁
边缘对比度最多应限制在 10:1,一般建议使用 4:1 的边缘对比度。原因是高对比度边缘(>10:1,例如在旧的 ISO 12233:2000 图表中发现的)可能会导致饱和或削波,从而导致边缘带有尖角,夸大 MTF 测量值。有关更多详细信息,请参阅使用 Rescharts 斜边模块,第 2 部分:警告 - 剪辑。
斜边的优缺点
好处
- 最有效地利用空间,这使得创建 MTF 响应的详细地图成为可能
- SFRplus、eSFR ISO、SFRreg和Checkerboard中的快速、自动化区域检测
- 快速计算
- 对噪音相对不敏感(如果应用降噪,则高度免疫)
- 符合 ISO 12233 标准,其“分箱”(超分辨率)算法允许在奈奎斯特频率 (0.5 C/P) 以上测量 MTF
- 制造测试的最佳模式
缺点
- 在具有强图像相关锐化的系统(即,锐化量随边缘对比度增加)的系统中可能会产生乐观的结果。这种类型的图像处理(双边过滤)在消费类相机中几乎是普遍的。
- 在具有极端混叠(高于奈奎斯特频率的强能量)的系统中给出不一致的结果,尤其是在小区域中。
- 不适合测量精细纹理,推荐使用对数频率对比度或溢出硬币(枯叶)图案。
注意:Imatest Master 可以计算几乎任何角度的边缘的 MTF,但由于采样相位敏感,应避免精确的垂直、水*和 45°。
斜边模块
Imatest Slanted-Edge 模块包括 SFR、SFRplus、eSFR ISO、Checkerboard 和 SFRreg(详见表 2 和清晰度模块)。
注意:请参阅“如何使用 Imatest 测试镜头”,了解如何使用SFRplus 或 eSFR ISO 测量 MTF。
表 2. Imatest斜边模块的简要总结。
| 模块 | 描述 | 例子 |
|---|---|---|
| SFR |
|
 |
| SFR+ | 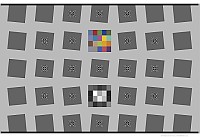 |
|
| eSFR ISO |
|
 |
| 棋盘 |
|
 |
| SFRreg | 几个单独的图表通常放置在图像字段周围;适用于:
|
 |
斜边算法
MTF 计算源自 ISO 标准 12233 。Imatest计算 包含许多增强功能,如下所列。当检查SFR输入对话框中 的ISO标准SFR复选框时,执行原始ISO计算 (我们建议未经检查,除非它专门需要)。
- 裁剪后的图像被线性化;即,调整像素级别以消除相机应用的 伽马编码。(Gamma 可调整,默认值为 0.5)。
- 红色、绿色、蓝色和亮度 ( Y ) 通道的边缘位置:
Y = 0.2125R + 0.7154G + 0.0721B(默认)或0.3R + 0.59G + 0.11B或 (可在选项 III 中选择)
确定每条扫描线(上图中的水*线)。 - 使用多项式回归为每个通道计算边缘的二阶拟合。二阶拟合消除了镜头畸变的影响。在上图中,方程的形式为:
<span id="MathJax-Span-500" class="mrow"><span id="MathJax-Span-501" class="mi"><span><span>x&nbsp;=一种0+一种1是的+一种2是的2 - 根据扫描线i的小数部分的值,
fp = x i – int(x i )
在每条扫描线处的二阶拟合,移位的边缘被添加到四个 bin 之一:
bin 1 if 0 ≤ fp < 0.25
bin 2 如果0.25 ≤ fp < 0.5
bin 3 如果0.5 ≤ fp < 0.75
bin 4 如果0.75 ≤ fp < 1
注意:前面等式中提到的 bin 不依赖于检测到的边缘位置。
-
- 将四个 bin 组合起来计算*均 4x 过采样边缘。这允许分析超出正常奈奎斯特频率的空间频率。
- 计算*均 4x 过采样边缘的导数 (d/dx)。应用居中的汉明窗以强制导数在其极限处为零。
- MTF 是加窗导数的傅里叶变换 (FFT) 的绝对值。
- 将四个 bin 组合起来计算*均 4x 过采样边缘。这允许分析超出正常奈奎斯特频率的空间频率。
注意:Imatest 斜边 SFR 计算的起源改编自 Matlab 程序 sfrmat,该程序由Peter Burns编写,用于实施 ISO 12233:2000 标准。Imatest 的 SFR 计算包含许多改进,包括改进的边缘检测、更好的镜头失真处理和更好的抗噪性。原始 Matlab 代码可在此处获得。在将 sfrmat 结果与 Imatest 进行比较时,假定音调响应是线性的;即,如果没有 OECF(色调响应曲线)文件输入到 sfrmat ,则gamma = 1。由于 Imatest 中 gamma 的默认值为 0.5,这是 sRGB 等标准色彩空间中数码相机的典型值,因此您必须将 gamma 设置为 1 以获得与 sfrmat 的良好一致性。
Imatest 和 ISO 12233 计算之间的差异
位于斜边设置窗口左下方的Imatest/ISO 标准 SFR下拉菜单(以前是一个复选框)允许您在 Imatest 和 ISO 兼容计算之间进行选择。不推荐设置 #2(ISO 12233 2017 及更早版本),因为Imatest和更新的 ISO 计算更准确 - 在存在噪声和光学失真的情况下绝对优越。
-
-
- 每条扫描线的中心是根据Imatest 计算中低通滤波边缘导数的峰值计算的。ISO 计算使用质心,这在没有噪声的情况下是最佳的。但是噪声 总是在某种程度上存在,并且质心对噪声非常敏感,因为距离边缘很远的噪声与边缘本身具有相同的权重。低通滤波器更接*于匹配滤波器,它可以最佳地检测边缘导数峰值。
- Gamma (用于线性化数据)作为输入值输入或从已知的图表对比度中导出。在 ISO 标准实现中,除非输入 OECF 文件,否则假定为 1。
- Imatest假设边缘可能由于光学失真而具有一些(二阶)曲率。到 2017 年的 ISO 标准计算假定为直线,这可能导致在存在光学失真的情况下降低 MTF 测量值。弯曲边缘(五阶拟合)包含在 ISO 12233:2022+ 计算中。与旧 Imatest 计算的二阶拟合几乎没有区别。
- Imatest 的 “改进的变迹”降噪 (默认开启)导致更一致的测量(无系统差异)。检查 ISO 标准计算时关闭
- ISO 12233:2014 中引入的线扩展函数 ( LSF ) 校正因子自 2015年以来已在Imatest 中实施。校正因子D(j)(或D(k)),用于补偿数值微分时的高频损失从边缘扩展函数 ( ESF )计算LSF在 ISO 12233:2014 和 2017 标准中都是不正确的。Imatest和更新的 ISO 实施基于第一原则(我们拥有全套方程式),符合两个版本标准的意图。
- Tukey 窗口用于较新的 Imatest 和 ISO 计算。它似乎没有什么不同。
-
请注意,可以在 Peter Burns 链接中找到其他计算详细信息 (如下)
斜边降噪
Imatest 改进的变迹技术降低了噪声,使 MTF 结果更加一致,同时对 MTF 测量的影响最小。它通过在距边缘中心一定距离但不在中心附**滑线扩散函数(LSF;边缘的导数)来工作。因为它对*均 MTF 几乎没有影响,所以除非结果需要严格符合 ISO 标准,否则它应该保持不变。单击下面的按钮以获取完整说明。
相关锐度技术
一些相关的技术会影响清晰度结果,包括:
关键要点
-
- 频域图和空间域图传达了相似的信息,但形式不同。空间域中的窄边缘对应于频域中的宽频谱(扩展频率响应),反之亦然。
- Imatest 测量系统响应,其中包括图像处理:不仅仅是镜头响应。
- 高于奈奎斯特频率的传感器响应会导致混叠,表现为低空间频率的莫尔图案。在拜耳传感器(除 Foveon 之外的所有传感器)中,莫尔图案显示为彩色条纹。Foveon 传感器中的莫尔条纹远不那么麻烦,因为它是单色的,并且红色和蓝色通道的有效奈奎斯特频率低于拜耳传感器。
- 奈奎斯特频率及以上的 MTF 并不是混叠问题的明确指标。MTF 是镜头和传感器响应、去马赛克算法和锐化的产物,它经常提高奈奎斯特频率的 MTF。MTF 应被解释为可能存在问题的警告。
- 计算 R、G、B 和亮度 (Y) 通道的结果(默认情况下,Y = 0.2125R + 0.7154G + 0.0721B,但可以设置为较旧的 (NTSC) 值, 0.3 R +0.59 G +0.11 B,在选项 III窗口中)。Y 通道通常显示在前景中,但可以选择任何其他通道。所有内容都包含在 .CSV 输出文件中。
- CCD 传感器的水*和垂直分辨率可能不同,应单独测量。对于 CMOS 传感器,它们几乎相同。回想一下,水*分辨率是用垂直边缘测量的,垂直分辨率是用水*边缘测量的。分辨率只是影响图像质量的众多标准之一。
- MTF 可以在整个图像中变化,并且它并不总是遵循中心附*最清晰和角落附*不太清晰的预期模式。原因有很多:镜头未对准、场曲、散焦等。这就是为什么测量很重要。
-
其他资源
-
-
- Bob Atkins对MTF 和 SQF 有很好的介绍 。SQF(主观品质因数)是一种包含人眼对比敏感度函数 (CSF) 的感知打印清晰度的量度。它将在 2006 年 10 月下旬添加到 Imatest Master。
- 校准目标(谷歌地球博客)校准目标——主要用于 MTF——从卫星上可见。Part 5. 环游世界,特别有趣。一位客户在 法国 13300 Salon-de-Provence使用了一个目标。
-
-
 资料整理和分享不易,如果觉得对您有帮忙,随缘扫码请喝杯咖啡。
资料整理和分享不易,如果觉得对您有帮忙,随缘扫码请喝杯咖啡。
 浙公网安备 33010602011771号
浙公网安备 33010602011771号