深度学习--卷积网络 Autoencoder降噪还原手写数字识别--89
目录
import numpy as np
import tensorflow as tf
import tensorflow.keras as K
import matplotlib.pyplot as plt
from tensorflow.keras.layers import Dense, Conv2D, MaxPooling2D, UpSampling2D
np.random.seed(11)
tf.random.set_seed(11)
batch_size = 128
max_epochs = 50
filters = [32,32,16]
(x_train, _), (x_test, _) = K.datasets.mnist.load_data()
x_train = x_train / 255.
x_test = x_test / 255.
x_train = np.reshape(x_train, (len(x_train),28, 28, 1))
x_test = np.reshape(x_test, (len(x_test), 28, 28, 1))
noise = 0.5
x_train_noisy = x_train + noise * np.random.normal(loc=0.0, scale=1.0, size=x_train.shape)
x_test_noisy = x_test + noise * np.random.normal(loc=0.0, scale=1.0, size=x_test.shape)
x_train_noisy = np.clip(x_train_noisy, 0, 1)
x_test_noisy = np.clip(x_test_noisy, 0, 1)
x_train_noisy = x_train_noisy.astype('float32')
x_test_noisy = x_test_noisy.astype('float32')
#print(x_test_noisy[1].dtype)
class Encoder(K.layers.Layer):
def __init__(self, filters):
super(Encoder, self).__init__()
self.conv1 = Conv2D(filters=filters[0], kernel_size=3, strides=1, activation='relu', padding='same')
self.conv2 = Conv2D(filters=filters[1], kernel_size=3, strides=1, activation='relu', padding='same')
self.conv3 = Conv2D(filters=filters[2], kernel_size=3, strides=1, activation='relu', padding='same')
self.pool = MaxPooling2D((2, 2), padding='same')
def call(self, input_features):
x = self.conv1(input_features)
#print("Ex1", x.shape)
x = self.pool(x)
#print("Ex2", x.shape)
x = self.conv2(x)
x = self.pool(x)
x = self.conv3(x)
x = self.pool(x)
return x
class Decoder(K.layers.Layer):
def __init__(self, filters):
super(Decoder, self).__init__()
self.conv1 = Conv2D(filters=filters[2], kernel_size=3, strides=1, activation='relu', padding='same')
self.conv2 = Conv2D(filters=filters[1], kernel_size=3, strides=1, activation='relu', padding='same')
self.conv3 = Conv2D(filters=filters[0], kernel_size=3, strides=1, activation='relu', padding='valid')
self.conv4 = Conv2D(1, 3, 1, activation='sigmoid', padding='same')
self.upsample = UpSampling2D((2, 2))
def call(self, encoded):
x = self.conv1(encoded)
#print("dx1", x.shape)
x = self.upsample(x)
#print("dx2", x.shape)
x = self.conv2(x)
x = self.upsample(x)
x = self.conv3(x)
x = self.upsample(x)
return self.conv4(x)
class Autoencoder(K.Model):
def __init__(self, filters):
super(Autoencoder, self).__init__()
self.loss = []
self.encoder = Encoder(filters)
self.decoder = Decoder(filters)
def call(self, input_features):
#print(input_features.shape)
encoded = self.encoder(input_features)
#print(encoded.shape)
reconstructed = self.decoder(encoded)
#print(reconstructed.shape)
return reconstructed
model = Autoencoder(filters)
model.compile(loss='binary_crossentropy', optimizer='adam')
loss = model.fit(x_train_noisy,
x_train,
validation_data=(x_test_noisy, x_test),
epochs=max_epochs,
batch_size=batch_size)
Epoch 1/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m15s[0m 26ms/step - loss: 0.2898 - val_loss: 0.1548
Epoch 2/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 27ms/step - loss: 0.1477 - val_loss: 0.1335
Epoch 3/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 27ms/step - loss: 0.1319 - val_loss: 0.1246
Epoch 4/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 27ms/step - loss: 0.1246 - val_loss: 0.1197
Epoch 5/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1201 - val_loss: 0.1162
Epoch 6/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 27ms/step - loss: 0.1169 - val_loss: 0.1136
Epoch 7/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 27ms/step - loss: 0.1144 - val_loss: 0.1117
Epoch 8/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1125 - val_loss: 0.1101
Epoch 9/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 27ms/step - loss: 0.1109 - val_loss: 0.1087
Epoch 10/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1096 - val_loss: 0.1075
Epoch 11/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1085 - val_loss: 0.1066
Epoch 12/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1076 - val_loss: 0.1058
Epoch 13/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1068 - val_loss: 0.1051
Epoch 14/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1061 - val_loss: 0.1046
Epoch 15/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1055 - val_loss: 0.1040
Epoch 16/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1050 - val_loss: 0.1037
Epoch 17/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1045 - val_loss: 0.1033
Epoch 18/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1041 - val_loss: 0.1030
Epoch 19/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1038 - val_loss: 0.1027
Epoch 20/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1034 - val_loss: 0.1023
Epoch 21/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1031 - val_loss: 0.1021
Epoch 22/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1028 - val_loss: 0.1018
Epoch 23/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m14s[0m 29ms/step - loss: 0.1025 - val_loss: 0.1016
Epoch 24/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 29ms/step - loss: 0.1023 - val_loss: 0.1014
Epoch 25/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m14s[0m 30ms/step - loss: 0.1021 - val_loss: 0.1012
Epoch 26/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 29ms/step - loss: 0.1019 - val_loss: 0.1011
Epoch 27/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m14s[0m 29ms/step - loss: 0.1017 - val_loss: 0.1009
Epoch 28/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1015 - val_loss: 0.1008
Epoch 29/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1013 - val_loss: 0.1007
Epoch 30/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 27ms/step - loss: 0.1012 - val_loss: 0.1006
Epoch 31/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 27ms/step - loss: 0.1010 - val_loss: 0.1005
Epoch 32/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1009 - val_loss: 0.1004
Epoch 33/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1008 - val_loss: 0.1003
Epoch 34/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m14s[0m 29ms/step - loss: 0.1007 - val_loss: 0.1003
Epoch 35/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1006 - val_loss: 0.1002
Epoch 36/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1005 - val_loss: 0.1001
Epoch 37/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1003 - val_loss: 0.1000
Epoch 38/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1002 - val_loss: 0.0999
Epoch 39/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1001 - val_loss: 0.0998
Epoch 40/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1001 - val_loss: 0.0998
Epoch 41/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.1000 - val_loss: 0.0997
Epoch 42/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.0999 - val_loss: 0.0997
Epoch 43/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.0998 - val_loss: 0.0996
Epoch 44/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.0997 - val_loss: 0.0995
Epoch 45/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.0996 - val_loss: 0.0996
Epoch 46/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.0996 - val_loss: 0.0996
Epoch 47/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.0995 - val_loss: 0.0996
Epoch 48/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m13s[0m 28ms/step - loss: 0.0994 - val_loss: 0.0994
Epoch 49/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m14s[0m 30ms/step - loss: 0.0993 - val_loss: 0.0994
Epoch 50/50
[1m469/469[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m14s[0m 29ms/step - loss: 0.0993 - val_loss: 0.0994
plt.plot(range(max_epochs), loss.history['loss'])
plt.xlabel('Epochs')
plt.ylabel('Loss')
plt.show()

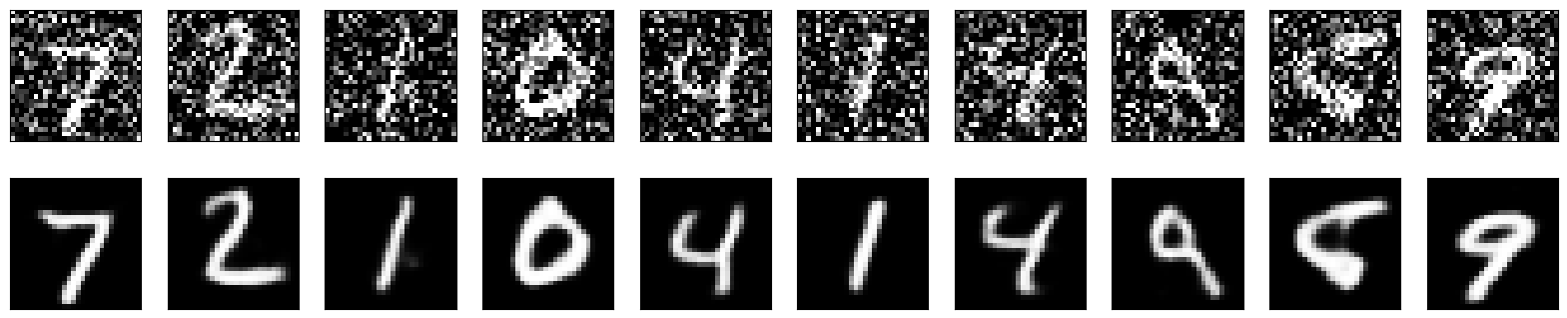
number = 10 # how many digits we will display
plt.figure(figsize=(20, 4))
for index in range(number):
# display original
ax = plt.subplot(2, number, index + 1)
plt.imshow(x_test_noisy[index].reshape(28, 28), cmap='gray')
ax.get_xaxis().set_visible(False)
ax.get_yaxis().set_visible(False)
# display reconstruction
ax = plt.subplot(2, number, index + 1 + number)
plt.imshow(tf.reshape(model(x_test_noisy)[index], (28, 28)), cmap='gray')
ax.get_xaxis().set_visible(False)
ax.get_yaxis().set_visible(False)
plt.show()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号