


如何将3D投影至2D平面--3D初探
前一段时间,组里分享一个关于3D投影至2D平面上的主题,一直没有时间细细的咀嚼一下。
每天的代码大部分都是在写业务逻辑,细想一下,自从毕业上班以来,一直没有去写过关于图形展示方面的东东,所以决定先入个门,以后要是有需求了也可以快速上手,也当补充一下高中的数学知识。
1,旋转
处理旋转需要用到一个旋转变换公式:
绕原点逆时针旋转 θ 度角的变换公式是  与
与  ,用矩阵表示为:
,用矩阵表示为:

由于是x,y,z的三维坐标系,所以根据上面的公式,可以得到如下的转换公式:
//向量旋转
function rotateX(x, y, z, a) {//绕X轴旋转
return {
x: x,
y: y * Math.cos(a) - z * Math.sin(a),
z: y * Math.sin(a) + z * Math.cos(a)
};
}
function rotateY(x, y, z, a) {//绕Y轴旋转
return {
x: x * Math.cos(a) + z * Math.sin(a),
y: y,
z: z * Math.cos(a) - x * Math.sin(a)
};
}
function rotateZ(x, y, z, a) {//绕Z轴旋转
return {
x: x * Math.cos(a) - y * Math.sin(a),
y: x * Math.sin(a) + y * Math.cos(a),
z: z
};
}2,球面坐标系转直角坐标系:
http://zh.wikipedia.org/wiki/%E5%9D%90%E6%A0%87%E7%B3%BB
球坐标系是用一个角度  表示位置和xy-面的相对关系。如P 点的球坐标为
表示位置和xy-面的相对关系。如P 点的球坐标为 。
。
 是原点至P点之间的距离。
是原点至P点之间的距离。 - 是线 OP 在 xy-面的投影线与正 x-轴之间的夹角。
 为原点到点 P 的连线与正 z-轴之间的天顶角。
为原点到点 P 的连线与正 z-轴之间的天顶角。
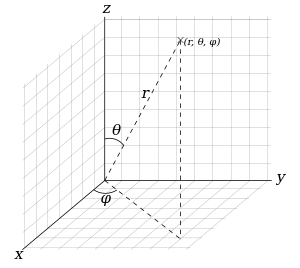 用球坐标 来表示一个点的位置
用球坐标 来表示一个点的位置
而根据上面的介绍,可以写出下面的转换公式:
/*
* 球面坐标系转直角坐标系
* @param {Number} a 仰角的余角
* @param {Number} b 转角
* @param {Number} r 半径
*/
function spherical(a, b, r) {
return {
x: r * Math.sin(a) * Math.cos(b),
y: r * Math.sin(a) * Math.sin(b),
z: r * Math.cos(a)
};
}3,透视投影:
以上方的三维坐标系(x, y, z)为例,假设观察点设置在(1000, 0, 0)的A点上,而目标点B设置在(x < 0, y > 0, z >0)的区域内,并且设B点的坐标为Xb, Yb, Zb;设B点在YOZ平面上的投影的坐标是(0, Y’b. Z’b),那么通过画图,可以得到一个公式:
1000 / (1000 - Xb) = Z’b / Zb (Xb < 0) == >> 这样就得到了Z’b(投影点的z坐标)和目标点B的原始Zb坐标之间和Xb坐标之间的关系;
同理:
1000 / ( - Xb) = Y’b / (Yb – Y’b) (Xb < 0)
根据以上投影原理,可以列出以下代码片段:

主需要注意第二个红框,第一个红框是纯粹的平行投影(就像影子一样),第二个是透视投影,只是和上面说明的坐标系使用的不一样,但是原理是一样的。
----------
下面来看下整体代码吧:(不是原创,只是用来学习分享下)
不贴整体代码了,直接点击下方链接,太占地儿,直接新标签打开链接,查看源代码..


