
【零基础】斯坦福四足机器人DIY指引
可以后空翻的机器狗
近日斯坦福开源了一个四足机器人项目“Stanford Doggo”,“只需”3000美金就可以DIY一个能跳一米高兼后空翻的电子小狗,一段时间研究后我们写了这篇简单的指引帮助大家快速入手这个灵敏的小狗狗(文末附相关资料下载),没钱整参考学习下也是极好的嘛,而且要相信万能的淘宝或能将成本降低数倍。

无障碍搭建硬件环境
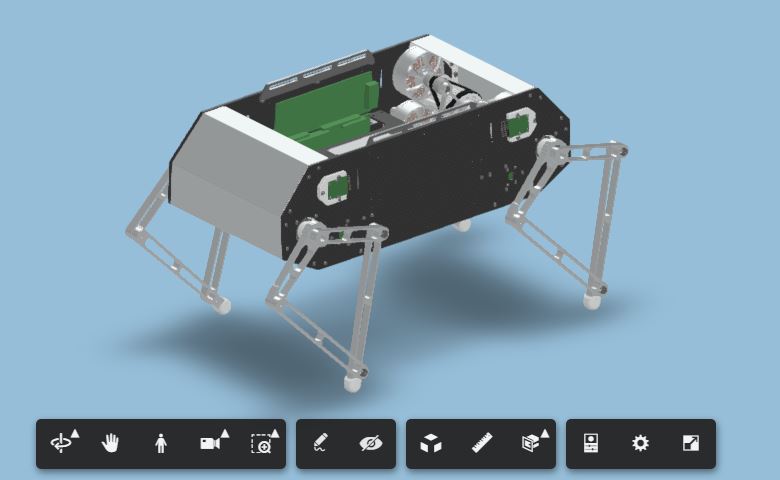
为了帮助大家建立硬件环境,项目组直接提供了CAD设计图(设计软件:Fusion 360,文末附CAD下载),包含了所有你需要的零配件而且是3D的视图!其中部分硬件可直接在网上买到,买不到的部分可使用3D打印出来,所以你只需要操心如何拼装即可。
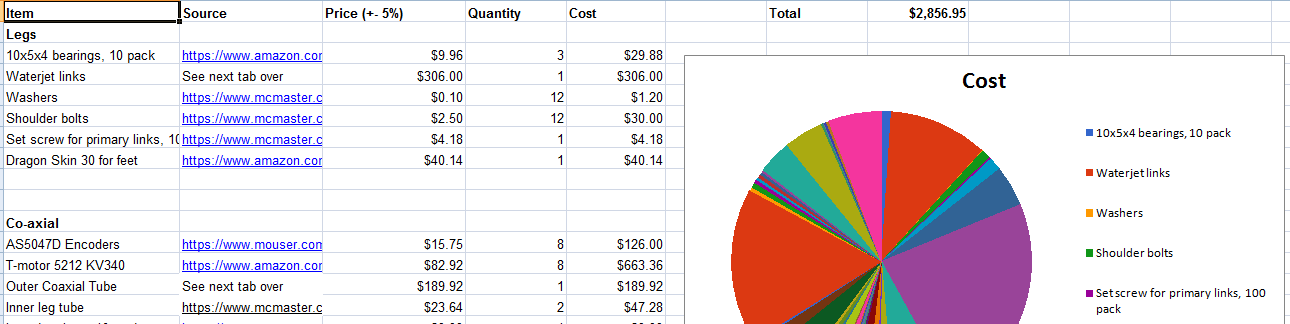
项目组还奉上了完整的BOM单(文末附EXCEL下载),BOM单提供了各配件的购买地址,你可以直接购买或自制差不多的结构。
完整的源代码提供
Stanford Doggo使用Teensy开发板作为控制核心,电机控制则使用ODrive(开源的电机控制系统)。组装好硬件后你需要先将ODrive固件刷入电机控制系统中,然后进行一些配置,接着将代码写入Tennsy开发板即可。当你启动机器人后四条机械腿会先初始化一下然后进入待机状态,进入待机后你就可以通过无线网络发送指令来控制Doggo跑步、跳跃、前进等等。文末附ODrive固件、开发板源码下载。
代码中已实现的指令
S:Stop,命令Doggo停止所有动作,机械腿还原到初始状态
D:Debugging,打开或关闭debugging信息
B:Bound,跳跃
E:Dance,跳舞
F:Flip,后空翻
H:Hop,小幅原地跳
J:Jump,最大扭矩原地跳(大幅度)
T:Trot,快步向前走
心动不如行动,赶紧试试看吧!
关注公众号“零基础爱学习”回复“doggo”获取以下资料:
1、Stanford Doggo完整CAD文件(3D)
2、完整的BOM单
3、ODrive固件
4、Stanford Doggo完整控制代码
我们还会继续补充更多技术资料,敬请关注“零基础爱学习”!


 浙公网安备 33010602011771号
浙公网安备 33010602011771号