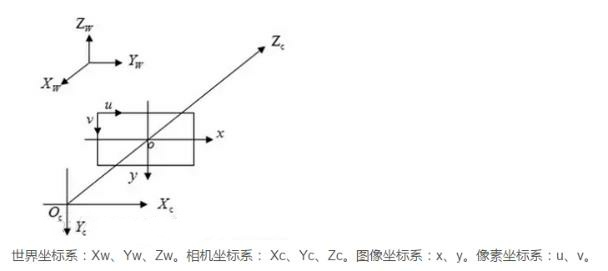
计算机视觉中的坐标系
分为像素坐标系、图像坐标系、相机坐标系、世界坐标系。
最终目标由世界坐标系转为像素坐标系。
1. 相机标定
【1】目的:求出相机的内、外参数,以及畸变参数。
【2】标定相机后通常是想做两件事:一个是由于每个镜头的畸变程度各不相同,通过相机标定可以校正这种镜头畸变矫正畸变,生成矫正后的图像;另一个是根据获得的图像重构三维场景。
- 内参数:镜头固有参数。such as, its focal length, skew, distortion, and image center. 镜头中心位置 (Cx,Cy) 和 焦距大小 fx,fy。均用像素长度表达。
- 外参数:摄像机位置参数,物体所处的现实世界坐标系对摄像机坐标系的刚性变换,可表达为旋转R 和 平移的结合 [R t]。
2. 世界坐标系到相机坐标的变换
设空间点Pw(Xw、Yw、Zw),对应的相机坐标下坐标为Pc(Xc、Yc、Zc):
1) 世界坐标系OwXwYwZw经旋转R、平移T得到相机坐标系OcXcYcZc
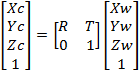 (1)
(1)
2) 成像平面坐标系(x,y)到图像坐标系(u,v)
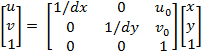 (2)
(2)
3) 相机坐标系OcXcYcZc到成像平面坐标系(x,y),矩阵表示如下
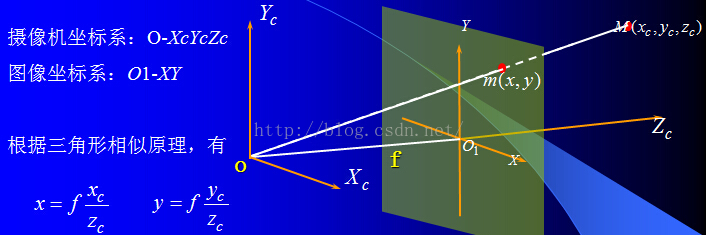
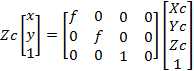 (3)
(3)
4) 因此,由上述(1)(2)(3)公式得到最终的转换过程,表示为:
_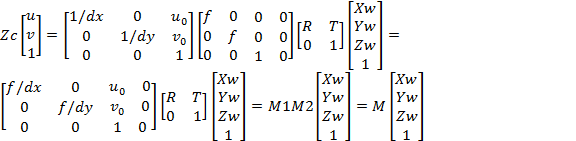 (4)
(4)
由上式(4)可知M1与u0, v0, dx, dy, f等内参数有关,M2与R、T外参有关。
3. 相机畸变
相机的镜头会发生光学畸变,此时在成像坐标系下得到的坐标与真实坐标之间存在误差,镜头径向畸变解释如下:
 (5)
(5)
 (6)
(6)
其中( ,
,  )为理想状态下投影点的坐标,(
)为理想状态下投影点的坐标,( ,
,  )为径向畸变引起的实际坐标值,k1,k2为径向畸变参数。为了使标定结果更加接近真实值,考虑用泰勒公式来计算径向畸变,则:
)为径向畸变引起的实际坐标值,k1,k2为径向畸变参数。为了使标定结果更加接近真实值,考虑用泰勒公式来计算径向畸变,则:
 (7)
(7)
![]() (8)
(8)
参考链接:https://wenku.baidu.com/view/66f55b0702020740be1e9bd8.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号