一、节点关联的方式
1、es使用两种不同的方式来发现对方:广播与单播,也可以同时使用两者,但默认的是广播,单播需要已知节点列表来完成
2、广播方式
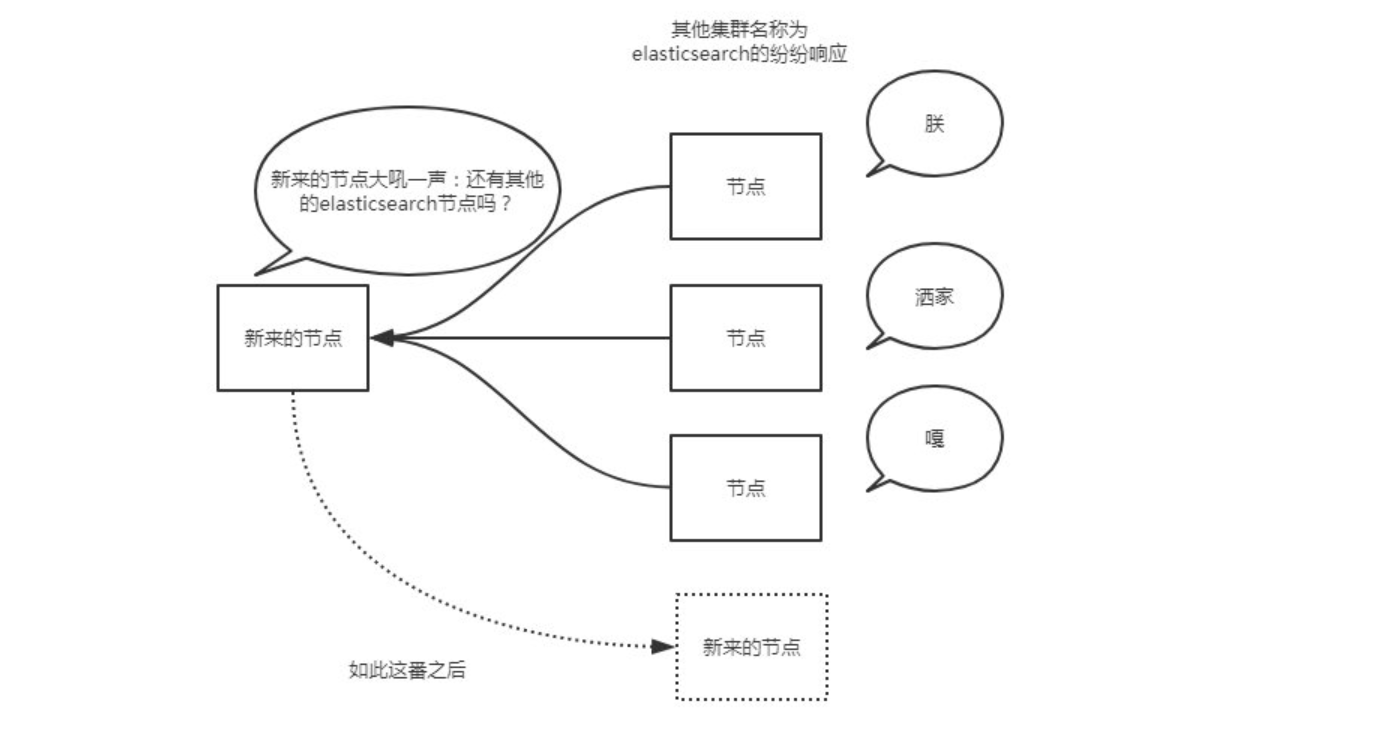
①当es实例启动的时候,它发送了广播的ping请求到地址224.2.2.4:54328,而其他的es实例使用同样的集群名称响应了这个请求
②一般这个默认的集群名称就是下面的cluster_name对应的elasticsearch,通常而言,广播是个很好地方式,但是,广播也有不好之处,过程不可控
![]()
③创建方式
1、在本地单独的目录中,再复制一份elasticsearch文件
2、分别启动bin目录中的启动文件
3、在浏览器里输入:http://127.0.0.1:9200/_cluster/health?pretty => 通过number_of_nodes可以看到,目前集群中已经有了两个节点了
3、单播方式
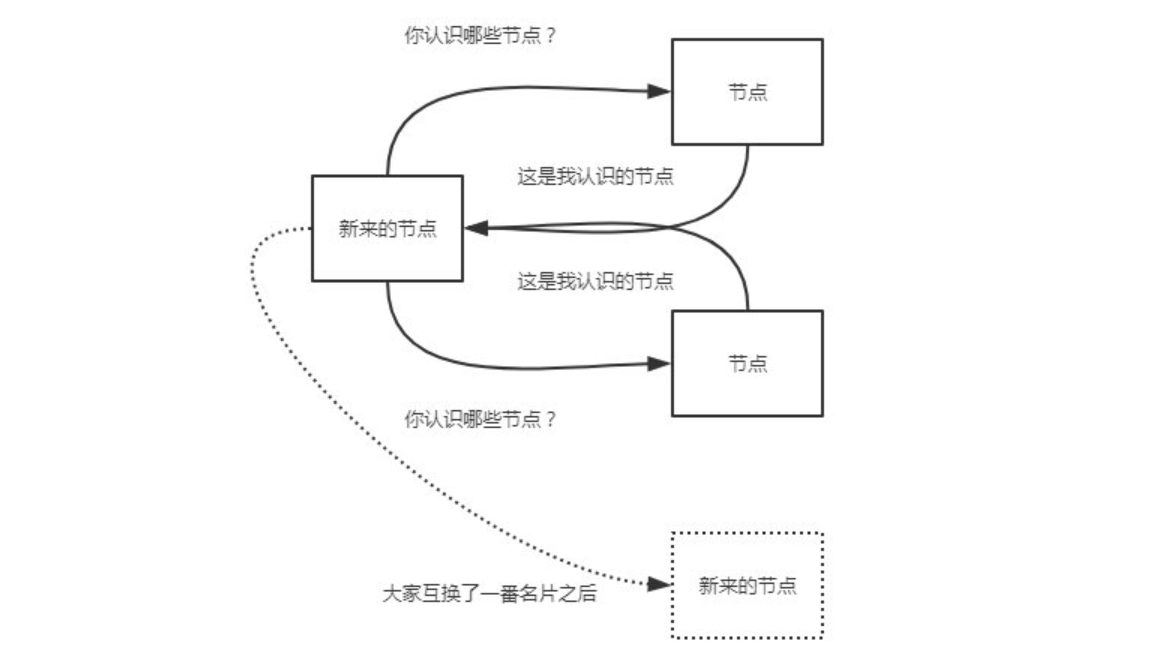
①当节点的ip不经常变化的时候,或者es只连接特定的节点,单播发现是个很理想的模式,使用单播时,告诉es集群其他节点的ip及可选的端口及端口范围,在elasticsearch.yml配置文件中设置,大家就像交换微信名片一样,相互传传就加群了,一般的,我们没必要关闭单播发现,如果需要广播发现的话,配置文件中的列表保持空白即可
discovery.zen.ping.unicast.hosts: ["10.0.0.1", "10.0.0.3:9300", "10.0.0.6[9300-9400]"]
![]()
#现在,为这个集群增加一些单播配置,打开各节点内的\config\elasticsearch.yml文件,每个节点的配置如下(原配置文件都被注释了,可以理解为空,写好各节点的配置,直接粘贴进去,没有动注释的,出现问题了好恢复):
#1 elasticsearch1节点,集群名称是my_es1,集群端口是9300,节点名称是node1,监听本地9200端口,可以有权限成为主节点和读写磁盘(不写就是默认的)
cluster.name: my_es1
node.name: node1
network.host: 127.0.0.1
http.port: 9200
transport.tcp.port: 9300
discovery.zen.ping.unicast.hosts: ["127.0.0.1:9300", "127.0.0.1:9302", "127.0.0.1:9303", "127.0.0.1:9304"]
# 2 elasticsearch2节点,集群名称是my_es1,集群端口是9302,节点名称是node2,监听本地9202端口,可以有权限成为主节点和读写磁盘
cluster.name: my_es1
node.name: node2
network.host: 127.0.0.1
http.port: 9202
transport.tcp.port: 9302
node.master: true
node.data: true
discovery.zen.ping.unicast.hosts: ["127.0.0.1:9300", "127.0.0.1:9302", "127.0.0.1:9303", "127.0.0.1:9304"]
# 3 elasticsearch3节点,集群名称是my_es1,集群端口是9303,节点名称是node3,监听本地9203端口,可以有权限成为主节点和读写磁盘
cluster.name: my_es1
node.name: node3
network.host: 127.0.0.1
http.port: 9203
transport.tcp.port: 9303
discovery.zen.ping.unicast.hosts: ["127.0.0.1:9300", "127.0.0.1:9302", "127.0.0.1:9303", "127.0.0.1:9304"]
# 4 elasticsearch4节点,集群名称是my_es1,集群端口是9304,节点名称是node4,监听本地9204端口,仅能读写磁盘而不能被选举为主节点
cluster.name: my_es1
node.name: node4
network.host: 127.0.0.1
http.port: 9204
transport.tcp.port: 9304
node.master: false
node.data: true
discovery.zen.ping.unicast.hosts: ["127.0.0.1:9300", "127.0.0.1:9302", "127.0.0.1:9303", "127.0.0.1:9304"]
# 由上例的配置可以看到,各节点有一个共同的集群名字my_es1,但由于是本地环境,所以各节点的名字不能一致,分别启动它们,它们通过单播列表相互介绍,发现彼此,然后组成一个my_es1集群,谁是老大则是要看谁先启动了
二、选取主节点
1、无论是广播发现还是到单播发现,一旦集群中的节点发生变化,它们就会协商谁将成为主节点,elasticsearch认为所有节点都有资格成为主节点,如果集群中只有一个节点,那么该节点首先会等一段时间,如果还是没有发现其他节点,就会任命自己为主节点
2、对于节点数较少的集群,可以设置主节点的最小数量,虽然这么设置看上去集群可以拥有多个主节点,实际上这么设置是告诉集群有多少个节点有资格成为主节点,一般的规则是集群节点数除以2(向下取整)再加一,比如3个节点集群要设置为2,这么着是为了防止脑裂(split brain)问题
discovery.zen.minimum_master_nodes: 3
3、脑裂问题
①脑裂这个词描述的是这样的一个场景:(通常是在重负荷或网络存在问题时)elasticsearch集群中一个或者多个节点失去和主节点的通信,然后各节点就开始选举新的主节点,继续处理请求,这个时候,可能有两个不同的集群在相互运行着,这就是脑裂一词的由来,因为单一集群被分成了两部分
②为了防止这种情况的发生,就需要设置集群节点的总数,规则就是节点总数除以2再加一(半数以上),这样,当一个或者多个节点失去通信,小老弟们就无法选举出新的主节点来形成新的集群,因为这些小老弟们无法满足设置的规则数量
discovery.zen.minimum_master_nodes: 3 # 5/2+1 => 3
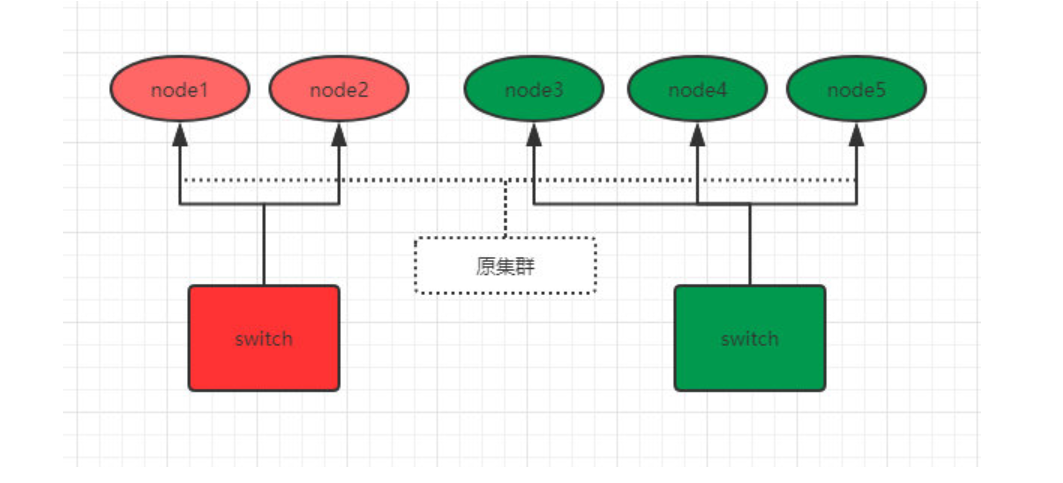
③之前原集群的主节点是node1,由于网络和负荷等原因,原集群被分为了两个switch:node1 、2和node3、4、5,因为minimum_master_nodes参数是3,所以node3、4、5可以组成集群,并且选举出了主节点node3,而node1、2节点因为不满足minimum_master_nodes条件而无法选举,只能一直寻求加入集群,要么网络和负荷恢复正常后加入node3、4、5组成的集群中,要么就是一直处于寻找集群状态,这样就防止了集群的脑裂问题
④除了设置minimum_master_nodes参数,有时候还需要设置node_master参数,比如有两个节点的集群,如果出现脑裂问题,那么它们自己都无法选举,因为都不符合半数以上,这时可以指定node_master,让其中一个节点有资格成为主节点,另外一个节点只能做存储用,当然这是特殊情况
![]()
4、错误识别
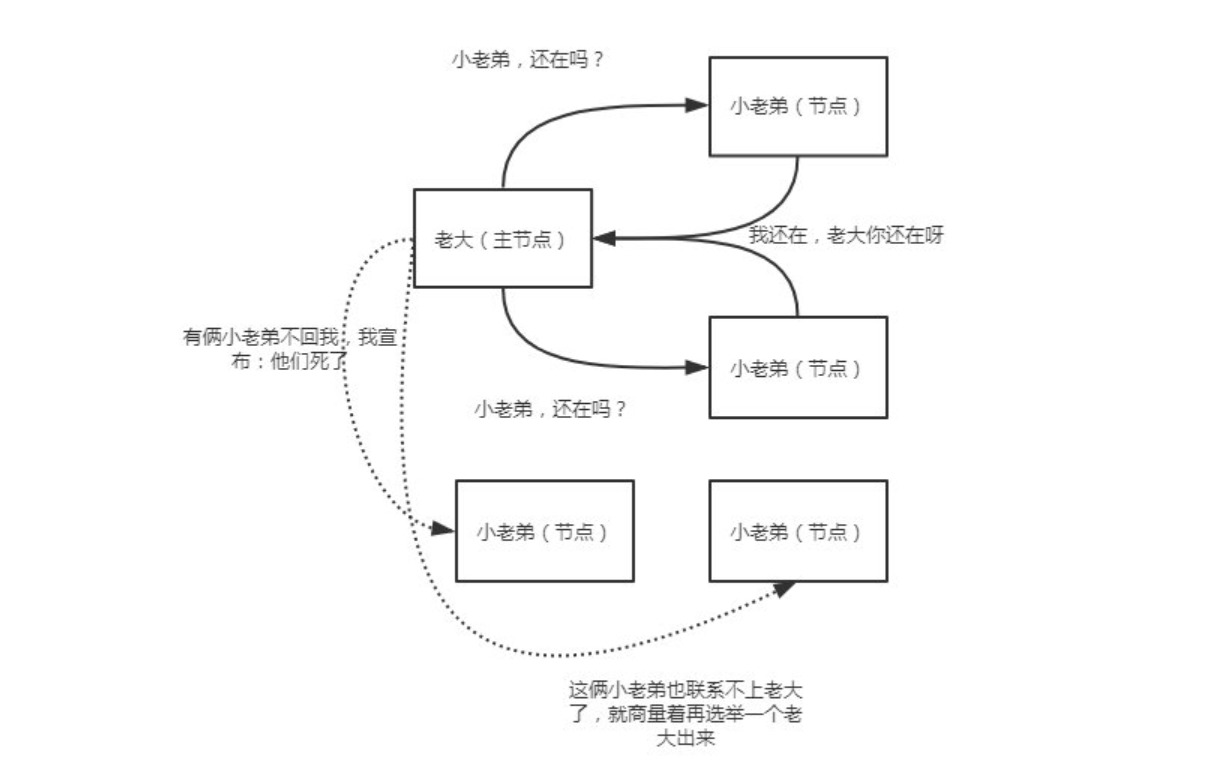
①其实错误识别,就是当主节点被确定后,建立起内部的ping机制来确保每个节点在集群中保持活跃和健康,这就是错误识别
②主节点ping集群中的其他节点,而且每个节点也会ping主节点来确认主节点还活着,如果没有响应,则宣布该节点失联
③但是,怎么看?多久没联系算是失联?这些细节都可以在配置文件中设置
discovery.zen.fd.ping_interval: 1
discovery.zen.fd.ping_timeout: 30
discovery_zen.fd.ping_retries: 3
/*
每个节点每隔`discovery.zen.fd.ping_interval`的时间(默认1秒)发送一个ping请求
等待`discovery.zen.fd.ping_timeout`的时间(默认30秒)
并尝试最多`discovery.zen.fd.ping_retries`次(默认3次),无果的话,宣布节点失联,并且在需要的时候进行新的分片和主节点选举
根据开发环境,适当修改这些值
*/
![]()


 浙公网安备 33010602011771号
浙公网安备 33010602011771号