
西门子PS on eMS Standalone《导入FANUC机器人TP程序》
导入TP程序到PDPS中
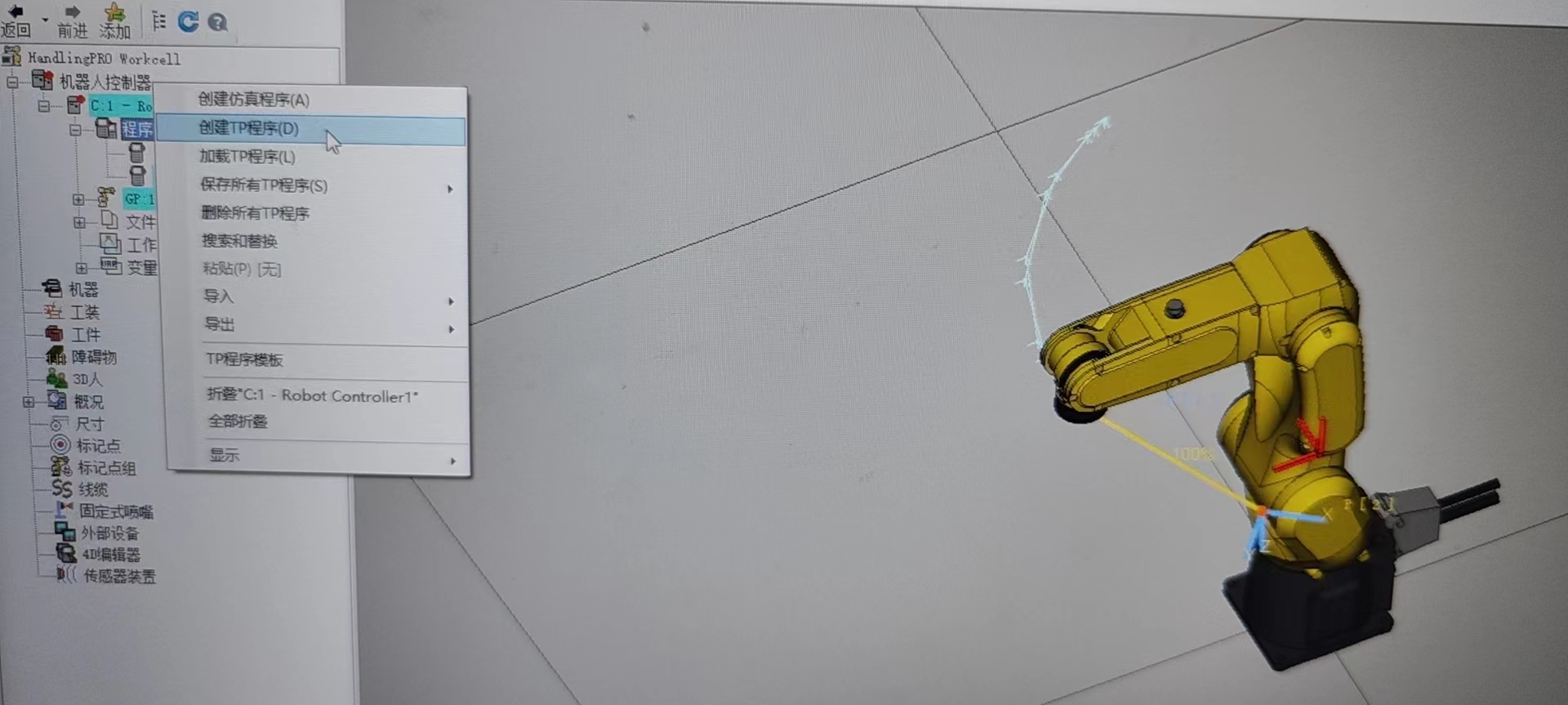
右键点击左侧项目树的 “程序” --> 点击 “创建TP程序”
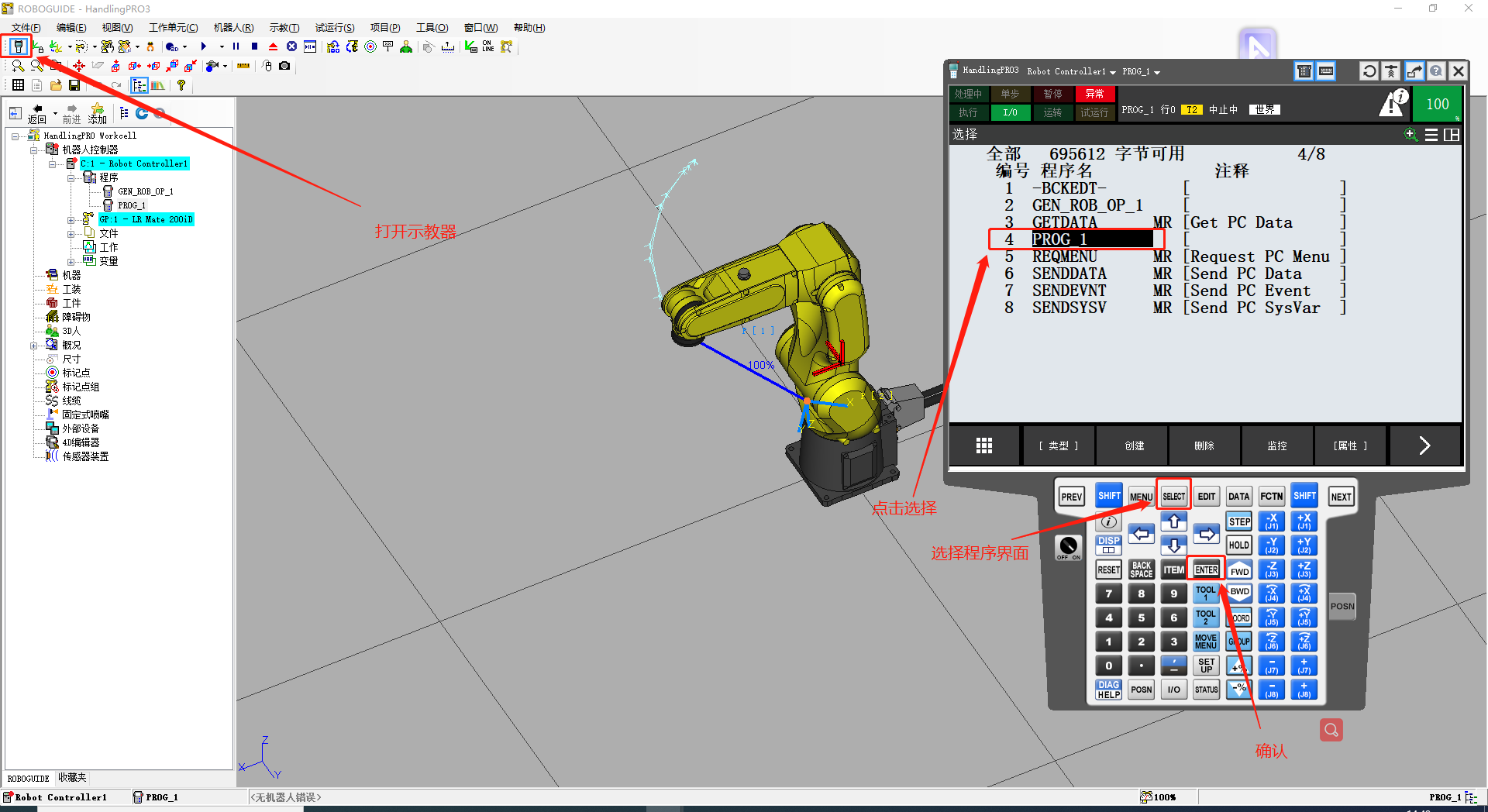
打开示教器 --> 点击“SELECT” --> 找到并选择创建的PROG_1 --> 点击”ENTER“
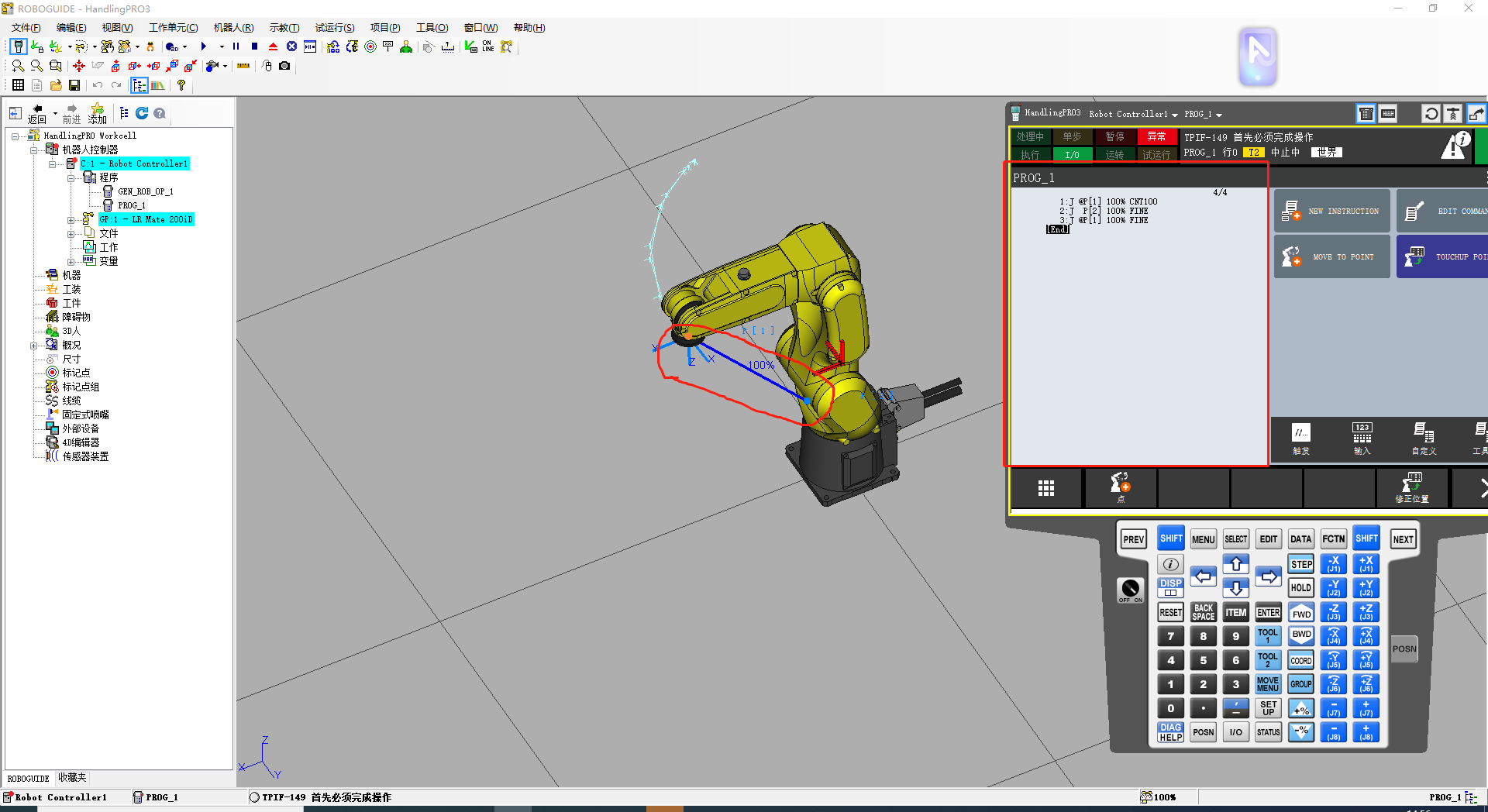
程序中随意设定几个目标点形成一条路径作为观测调试用
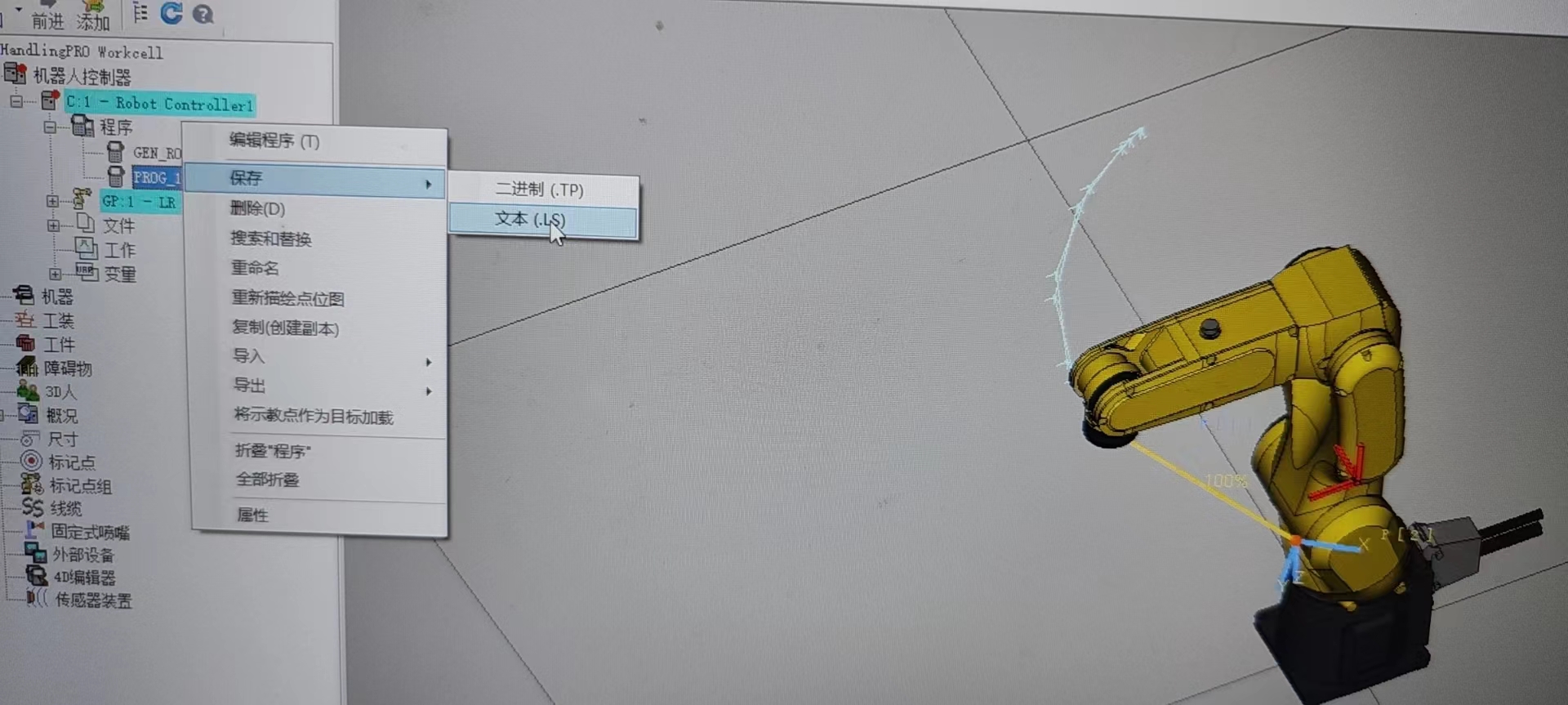
完成之前的全部操作后如图所示:右键左侧项目树的PROG_1 --> 保存 --> 格式选择 ”文本(.LS)“
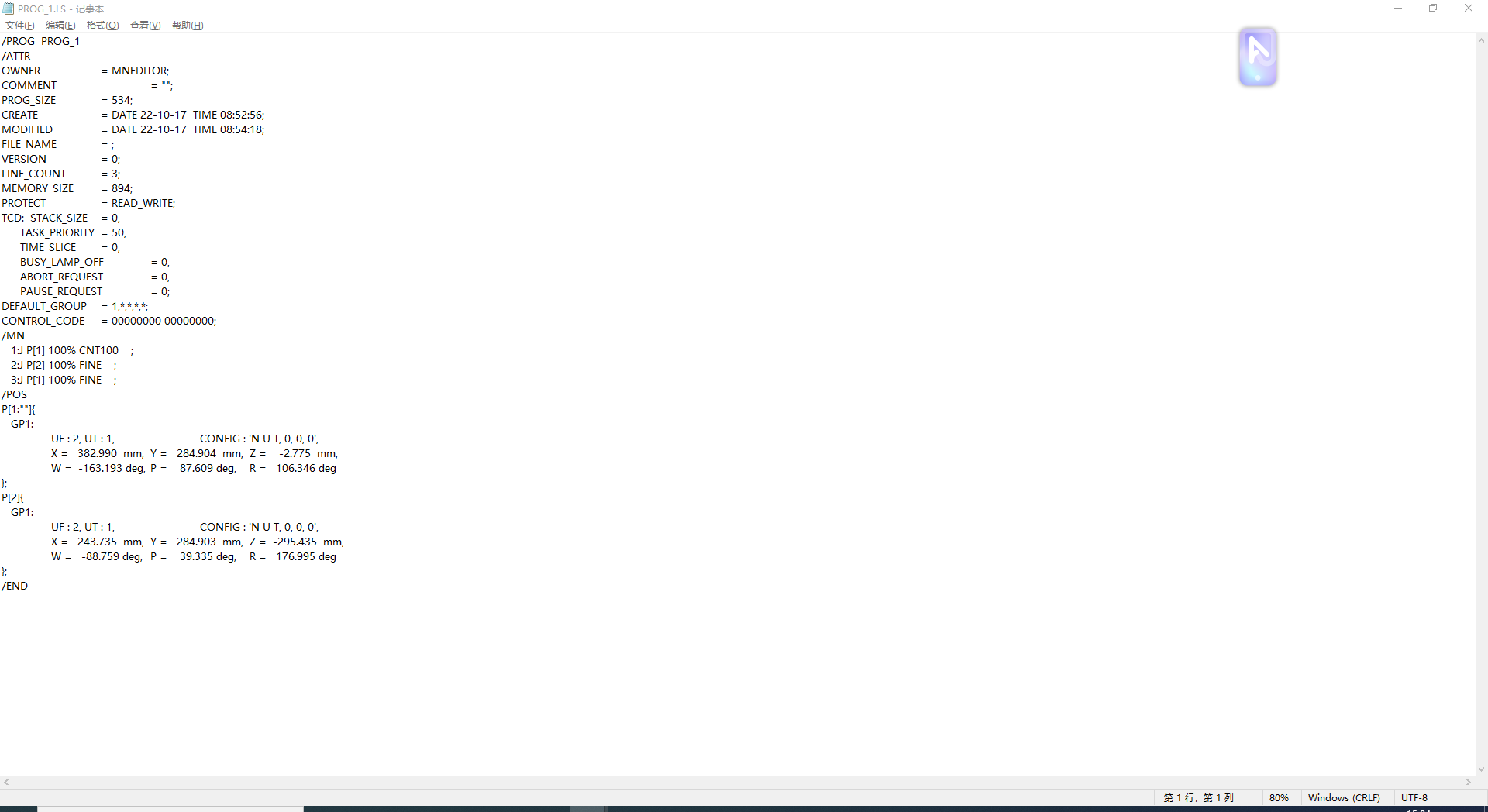
这是保存出来的PROG_1
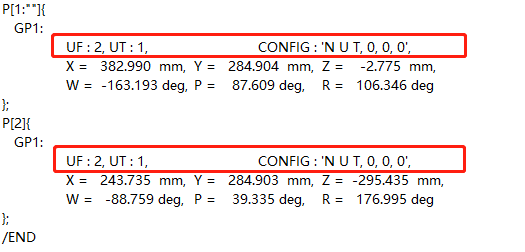
在PDPS中我们并不需要机器人配置参数
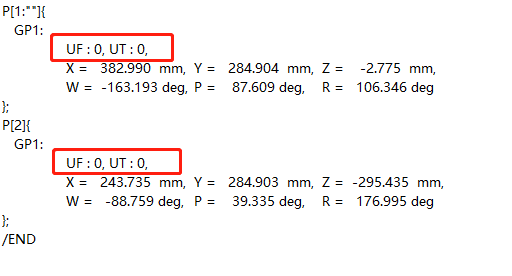
讲每一个点中的 UFrame (UF)、Utool (UT)都换为0,将配置(Config)删除。做完这些操作后保存

PDPS中选择对应机器人 --> 点击机器人栏目 --> 点击上传程序
选择我们保存出来并且修改好的PROG_1程序打开
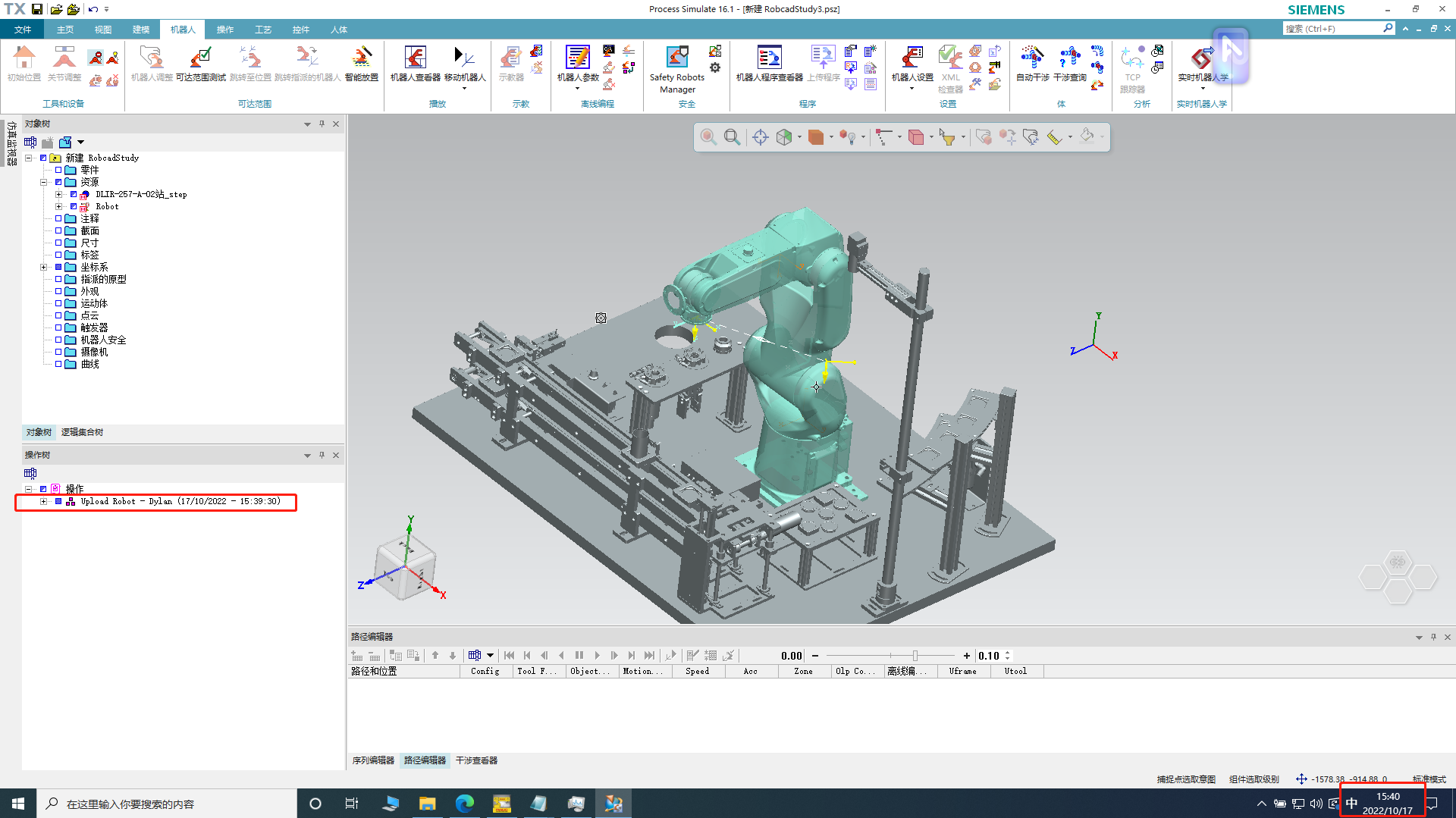
上传成功后可以看到一个与我们在Robotguide中定义的路径一模一样的路径,路径名称上面还会显示导入的日期时间
以下是需要注意的地方
首先,Robotguide中的机器人型号需要与PDPS中的机器人模型一致,虽然这句提醒有点多此一举但是还是有必要说;
第二,除了机器人型号需要一样之外,机器人基准坐标也需要一样;
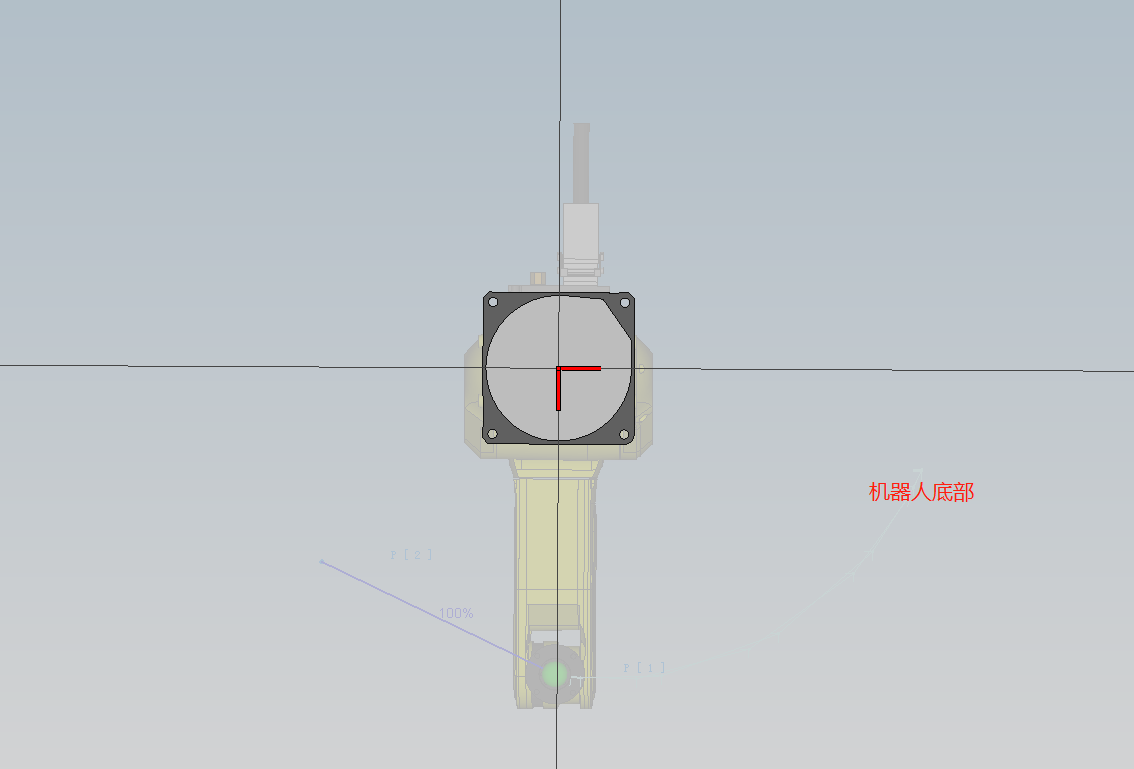
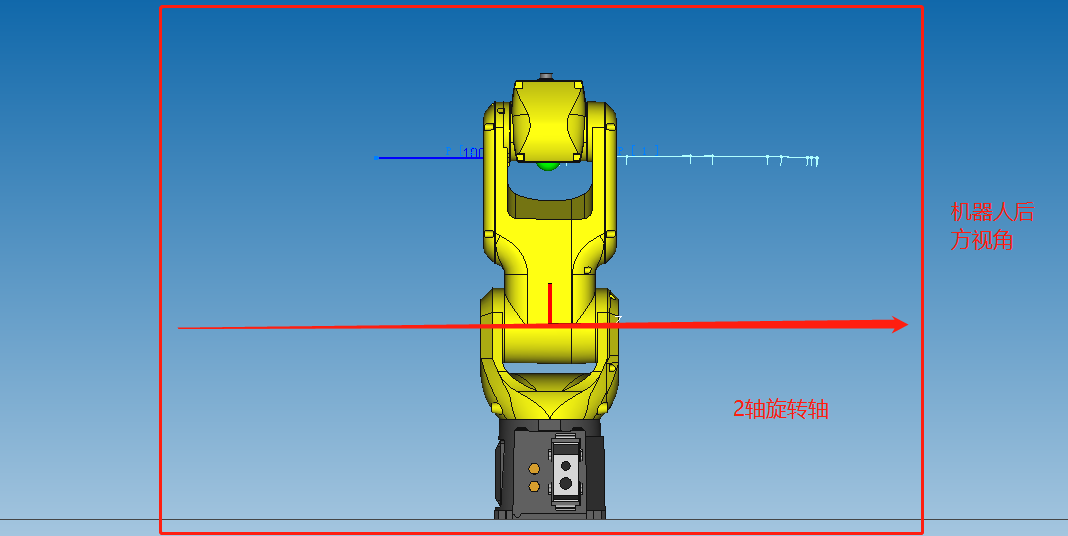
可以看到Robotguide中六轴机器人基准坐标一般位于垂直于基座圆心,并且与2轴旋转轴同一高度
PDPS的机器人基准坐标必须设置为与上面所说的Robguide机器人基准坐标同一位置,否则导入路径位置会发生变化

 浙公网安备 33010602011771号
浙公网安备 33010602011771号