CRF 详细推导、验证实例
逐帧softmax
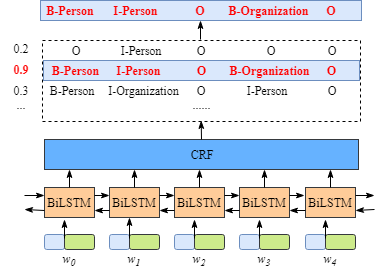
CRF主要用于序列标注问题,可以简单理解为是给序列中的每一帧都进行分类,既然是分类,很自然想到将这个序列用CNN或者RNN进行编码后,接一个全连接层用softmax激活,如下图所示

条件随机场
然而,当我们设计标签时,比如用s、b、m、e的4个标签来做字标注法的分词,目标输出序列本身会带有一些上下文关联,比如s后面就不能接m和e,等等。逐标签softmax并没有考虑这种输出层面的上下文关联,所以它意味着把这些关联放到了编码层面,希望模型能自己学到这些内容,但有时候会“强模型所难”。CRF和编码层是两个不同的层。

BiLSTM-CRF model
我们只考虑4个标签
- B-Person
- I- Person
- B-Organization
- I-Organization
- O
正如下图所示
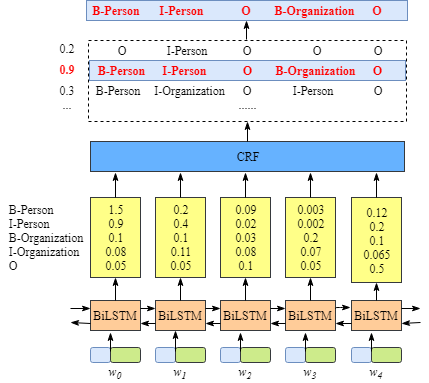
1. 在每个句子中的词x被以词向量和字向量所表示
2. 模型输出的是这次词的命名实体识别的标签
虽然,这没必要去了解BiLSTM的细节,但是为了了解CRF层更加清晰,你必须知道BiLSTM层输出内容的含义。

上面这张图已经阐述了BiLSTM输出对于每个label的打分
CRF Layer
CRF层学习的是标签之间的关联信息,也可以叫做约束信息,因为B-Peson后面不可能接I-Organization
在CRF层的损失函数有两个不同的分数,这两个分数是CRF层关键性的思想
1. Emission score(当前标签分数)
这个分数是来自编码器的输出,如下图所示:
为了方便起见,我们给每个标签一个下标
| Label | index |
| B-Person | 0 |
| I-Person | 1 |
| B-Organization | 2 |
| I-Organization | 3 |
| O | 4 |
当我们用xij表示emission score, i是字在句子中的下标,yi表示标签的下标,例如,xi=1,yj=2=Xw1,B-Oranization=0.1,这表示字w1会被标注为B-Organization的分数为0.1
2. Transition score(转移矩阵分数)
我们用tyiyj表示转移分数,例如tB-Person,I-Person=0.9代表B-Person->I-Person的分数为0.1,因此,我们有一个代表所有标签转移的转移矩阵。
为了让我们这个转移举证更加的强健,我们需要加入START和END,START代表的是一个句子的开始,不是代表第一个字;END代表的是一个句子的结尾,不是代表最后一个字。
转移矩阵的例子:下表是添加了START和END标签后的转移矩阵
| START | B-Person | I-Person | B-Organization | I-Organization | O | END | |
| START | 0 | 0.8 | 0.007 | 0.7 | 0.0008 | 0.9 | 0.008 |
| B-Person | 0 | 0.6 | 0.9 | 0.2 | 0.0006 | 0.6 |
0.009 |
| I-Person | -1 | 0.5 | 0.53 | 0.55 |
0.0003 |
0.85 | 0.008 |
| B-Organization | 0.9 | 0.5 | 0.0003 | 0.25 | 0.8 | 0.77 | 0.006 |
| I-Organization | -0.9 | 0.45 | 0.007 | 0.7 | 0.65 | 0.76 | 0.2 |
| O | 0 | 0.65 | 0.0007 | 0.7 | 0.0008 | 0.9 | 0.008 |
| END | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
正如上表所看到的,我们可以看到转移矩阵可以学习某些约束性的特征:例如:B-Person->I-Organization的分数很小,I-Person->I-Organization的分数很小。
你可能会问,这个转移矩阵是从哪里学习到这些约束性的特征的?
事实上,这个矩阵是Encoder-CRF的参数,这个是随机初始化后,通过训练学习到的。换句话说,CRF层可以通过训练自己学习到。
3. 所有路径的总得分和真正路径得分
CRF与Softmax不同的是,Softmax把序列标注看成是n个k分类问题,后者将序列标注看成是一个1个kn问题,从kn路径中找出一条分值最大的路径,并且CRF是一个条件概率。
CRF在定义的时候,提出了两个假设
假设一 该分布是指数族分布。
这个假设意味着存在函数\[f({y_1},...,{y_n};x){\kern 1pt} \]使得
\[P({y_1},...,{y_n}|x) = \frac{1}{{Z(x)}}\exp (f({y_1},...,{y_n};x))\]
注:在这里x表示CRF层的输入,表示编码器的输出,y表示命名实体的标签。
其中Z(x)是归一化因子,因为这个是条件分布,所以归一化因子与x(输入)有关。这个f函数可以视为一个打分函数,打分函数取指数并归一化就得到了概率分布。
假设二 输出之间的关联仅发生在相邻位置,并且关联是指数加性的。
这个假设意味着存在函数\[f({y_1},...,{y_n};x)\]可以更进一步简化为
\[f({y_1},...,{y_n};x) = h({y_1};x) + g({y_1},{y_2};x) + h({y_2};x) + g({y_2},{y_3};x) + ... + g({y_{n - 1}},{y_n};x) + h({y_n};x)\]
所有路径的总得分
假设在某一时刻所有可能的路径都都一个分为Pi,并且总共有N条可能的路径,那么所有路径的总分为
\[P_t^{total} = P_t^1 + P_t^2 + ... + P_t^N = e_t^{{S_1}} + e_t^{{S_2}} + ... + e_t^{{S_N}}\]
注:e是自然对数
明确的点,这是下面递归求法的关键关键:
- 每个分量的分值标志上一个时刻,转移到这个分量标签的总分,总分表示这个时刻所有分量的的总分,相当于总分求了2次指数的和,而分量只求了一次。
- t+1时刻的每个分量(每个标签)的结果 = t时刻所有分量的结果(这个shape为[B, N]) + 加上状态转移分值 (转移到t+1时刻分量的转移值) + t+1时刻的该标签的分值(编码器输出的值),然后再e指数再求和(这里为什么要e指数再求和,跟CRF的主题思想是一样的,哪条路径占是最大的概率),得到的结果才是该标签(指的是N个标签中的一个,分量的意思)在t+1时刻的结果,所有e指数求和才是t+1时刻的Ptotal
例如,如果我们数据集中有如下标签:
| Label | Index |
| B-Person | 0 |
| I-Person | 1 |
| B-Organization | 2 |
| I-Organization | 3 |
| O | 4 |
| START | 5 |
| END | 6 |
我们现在拿一个句子来举例,这个句子里面有5个字,它可能的标签是:
- 1) START B-Person B-Person B-Person B-Person B-Person END
- 2) START B-Person I-Person B-Person B-Person B-Person END
- …
- 10) START B-Person I-Person O B-Organization O END
- …
- N) O O O O O O O
在上面的例子中,如果第10个是真正的路径,换句话说,这个是训练集中对应的路径,那么第10个路径的得分肯定是在Ptotal中最大的。
下面是CRF真正路径的概率公式,随着训练步数的增加,那么真正路径的概率肯定是一直增加的。
\[\Pr {\rm{o}}{{\rm{b}}_{{\mathop{\rm Re}\nolimits} alPath}} = \frac{{{P_{{\mathop{\rm Re}\nolimits} alPath}}}}{{{P_1} + {P_2} + ... + {P_N}}}\]
现在我们来用一个例子来进行讲解:
我们加入我们训练的句子只有3个字 x = {w0, w1, w2},而且在我们的数据集中标签就只有两个 label = {l1, l2}
1. Emission Score,这个分值是从编码器中输出来的:
| l1 | l2 | |
| w0 | x01 | x02 |
| w1 | x11 | x12 |
| w2 | x21 | x22 |
2. Transition Score,状态转移分数:
| l1 | l2 | |
| l1 | t11 | t12 |
| l2 | t21 | t22 |
3. 在计算的时候,我们要用到递归的思想,我们在这里定义两个名称:obs和previous,previous是求前面所有步骤的结果,obs是当前词在编码器中输出的信息
在w0的时刻
obs = [x01, x02]
previous = None
相当于这一时刻的previous的result是编码器输出的值,所以 TotalScore(w0) = log(ex01+ex02),加上log是防止出现极小极大值
在w1的时刻
obs = [x11, x12]
previous = [x01, x02]
复制previous维度,并扩展
\[previous = \left( \begin{array}{l}
{x_{01}},{x_{01}}\\
{x_{02}},{x_{02}}
\end{array} \right)\]
复制previous维度,并扩展
\[obs = \left( \begin{array}{l}
{x_{11}},{x_{12}}\\
{x_{11}},{x_{12}}
\end{array} \right)\]
注:扩展维度和复制维度的目的是为了让我们计算更加的方便
对previous, obs和transition的分数进行求和
\[\begin{array}{l}
scores = \left( \begin{array}{l}
{x_{01}},{x_{01}}\\
{x_{02}},{x_{02}}
\end{array} \right) + \left( \begin{array}{l}
{t_{11}},{x_{12}}\\
{x_{21}},{x_{22}}
\end{array} \right) + \left( \begin{array}{l}
{x_{11}},{x_{12}}\\
{x_{11}},{x_{12}}
\end{array} \right)\\
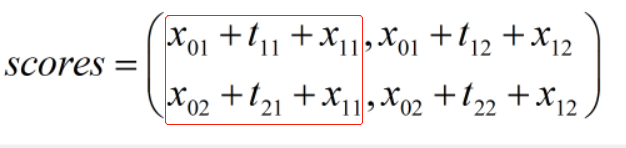
scores = \left( \begin{array}{l}
{x_{01}} + {t_{11}} + {x_{11}},{x_{01}} + {t_{12}} + {x_{12}}\\
{x_{02}} + {t_{21}} + {x_{11}},{x_{02}} + {t_{22}} + {x_{12}}
\end{array} \right)
\end{array}\]
红框中表示0时刻转移到1时刻的标签为1的每个路径的分值,取e指数然后求和就得到了1时刻标签为1的总分;1时刻标签为2同理。
所以,previous的值为
\[previous = [\log ({e^{{x_{01}} + {t_{11}} + {x_{11}}}} + {e^{{x_{02}} + {t_{21}} + {x_{11}}}}),\log ({e^{{x_{01}} + {t_{12}} + {x_{12}}}} + {e^{{x_{02}} + {t_{22}} + {x_{12}}}})]\]
注:这里求和是对某个标签求和,是在竖直方向求值,含义是:我这个标签这个时刻的总分
TotalScore为
\[\begin{array}{l}
TotalScore({w_0} \to {w_1}) = \log ({e^{previous[0]}} + {e^{previous[1]}})\\
TotalScore({w_0} \to {w_1}) = \log ({e^{\log ({e^{{x_{01}} + {t_{11}} + {x_{11}}}} + {e^{{x_{02}} + {t_{21}} + {x_{11}}}})}} + {e^{\log ({e^{{x_{01}} + {t_{12}} + {x_{12}}}} + {e^{{x_{02}} + {t_{22}} + {x_{12}}}})}})\\
TotalScore({w_0} \to {w_1}) = \log ({e^{{x_{01}} + {t_{11}} + {x_{11}}}} + {e^{{x_{02}} + {t_{21}} + {x_{11}}}} + {e^{{x_{01}} + {t_{12}} + {x_{12}}}} + {e^{{x_{02}} + {t_{22}} + {x_{12}}}})
\end{array}\]
在w2时刻
obs = [x21, x22]
previous = [log(ex01+x11+t11+ex02+x11+t21), log(ex01+x12+t12+ex02+x12+t22)]
扩展和复制维度
\[previous = \left( \begin{array}{l}
\log ({e^{{x_{01}} + {t_{11}} + {x_{11}}}} + {e^{{x_{02}} + {t_{21}} + {x_{11}}}}),\log ({e^{{x_{01}} + {t_{11}} + {x_{11}}}} + {e^{{x_{02}} + {t_{21}} + {x_{11}}}})]\\
\log ({e^{{x_{01}} + {t_{12}} + {x_{12}}}} + {e^{{x_{02}} + {t_{22}} + {x_{12}}}}),\log ({e^{{x_{01}} + {t_{12}} + {x_{12}}}} + {e^{{x_{02}} + {t_{22}} + {x_{12}}}})]
\end{array} \right)\]
\[obs = \left( \begin{array}{l}
{x_{21}},{x_{22}}\\
{x_{21}},{x_{22}}
\end{array} \right)\]
socres
\[\begin{array}{l}
scores = \left( \begin{array}{l}
\log ({e^{{x_{01}} + {t_{11}} + {x_{11}}}} + {e^{{x_{02}} + {t_{21}} + {x_{11}}}}),\log ({e^{{x_{01}} + {t_{11}} + {x_{11}}}} + {e^{{x_{02}} + {t_{21}} + {x_{11}}}})\\
\log ({e^{{x_{01}} + {t_{12}} + {x_{12}}}} + {e^{{x_{02}} + {t_{22}} + {x_{12}}}}),\log ({e^{{x_{01}} + {t_{12}} + {x_{12}}}} + {e^{{x_{02}} + {t_{22}} + {x_{12}}}})
\end{array} \right) + \left( \begin{array}{l}
{t_{11}},{t_{12}}\\
{t_{21}},{t_{22}}
\end{array} \right) + \left( \begin{array}{l}
{x_{21}},{x_{22}}\\
{x_{21}},{x_{22}}
\end{array} \right)\\
scores = \left( \begin{array}{l}
\log ({e^{{x_{01}} + {t_{11}} + {x_{11}}}} + {e^{{x_{02}} + {t_{21}} + {x_{11}}}}) + {t_{11}} + {x_{21}},\log ({e^{{x_{01}} + {t_{11}} + {x_{11}}}} + {e^{{x_{02}} + {t_{21}} + {x_{11}}}}) + {t_{12}} + {x_{22}}\\
\log ({e^{{x_{01}} + {t_{12}} + {x_{12}}}} + {e^{{x_{02}} + {t_{22}} + {x_{12}}}}) + {t_{21}} + {x_{21}},\log ({e^{{x_{01}} + {t_{12}} + {x_{12}}}} + {e^{{x_{02}} + {t_{22}} + {x_{12}}}}) + {t_{12}} + {x_{22}}
\end{array} \right)
\end{array}\]
计算previous
\[\begin{array}{l}
previous = [\\
\log ({e^{\log ({e^{{x_{01}} + {t_{11}} + {x_{11}}}} + {e^{{x_{02}} + {t_{21}} + {x_{11}}}}) + {t_{11}} + {x_{21}}}} + {e^{\log ({e^{{x_{01}} + {t_{12}} + {x_{12}}}} + {e^{{x_{02}} + {t_{22}} + {x_{12}}}}) + {t_{21}} + {x_{21}}}}),\log ({e^{\log ({e^{{x_{01}} + {t_{11}} + {x_{11}}}} + {e^{{x_{02}} + {t_{21}} + {x_{11}}}}) + {t_{12}} + {x_{22}}}} + {e^{\log ({e^{{x_{01}} + {t_{12}} + {x_{12}}}} + {e^{{x_{02}} + {t_{22}} + {x_{12}}}}) + {t_{12}} + {x_{22}}}})\\
]
\end{array}\]
正确的路径得分(Real Path Score)
很明显,在所有的路径中只有一条是真正的路径,如上述例子 START B-Person I-Person O B-Organization O END 这种路径就只有一条,是唯一的,eSi是在第某个时刻某个标签为i的得分,eS1+eS2+......+eSN为某个时刻所有标签的总得分
如何去计算Si:Si = EmissionScore + TransitionScore
Emission Score:
Emission Score = x0,START + x1,B-Person + x2,I-Person + x3,O + x4,B-Organization + x5,O + x6,END
- xindex, label是词xth被选中时的分数
- 这些分数全部来自BiLSTM的输出
- 对于开始和结束标志的分数,我们设置为0
Transition Score:
Transition Score = tSTART->B-Person + tB-Person->I-Person + tI-Person->O + tO->B-Organization + tB-Organization->O + tO->END
- tlabel1->label2是转移矩阵中label1到label2的分数
- 这个分数来自CRF层,或许可以说这是CRF层的参数
4. 损失函数
正确路径的概率公式为:
\[\Pr {\rm{o}}{{\rm{b}}_{{\mathop{\rm Re}\nolimits} alPath}} = \frac{{{P_{{\mathop{\rm Re}\nolimits} alPath}}}}{{{P_1} + {P_2} + ... + {P_N}}}\]
我们一般遇到概率问题,一般是用MLE(极大似然)来计算loss,所以Loss Function为
\[\begin{array}{l}
LossFunction = - \log \frac{{{e^{{S_{{\mathop{\rm Re}\nolimits} alPath}}}}}}{{{e^{{S_1}}} + {e^{{S_2}}} + ... + {e^{{S_N}}}}}\\
LossFunction = - ({S_{{\mathop{\rm Re}\nolimits} alPath}} - \log ({e^{{S_1}}} + {e^{{S_2}}} + ... + {e^{{S_N}}}))\\
LossFunction = - (\sum\nolimits_{i = 1}^N {{x_{i,{y_i}}} + \sum\nolimits_{i = 1}^{N - 1} {{t_{{y_i},{y_{i + 1}}}}} } - \log ({e^{{S_1}}} + {e^{{S_2}}} + ... + {e^{{S_N}}}))
\end{array}\]
从上面推导可以看出
\[{e^{{S_1}}} + {e^{{S_2}}} + ... + {e^{{S_N}}}\]
就是我们计算的所有路径总得分;再减去一个真实路径下在预测时的分值
\[\sum\nolimits_{i = 1}^N {{x_{i,{y_i}}} + \sum\nolimits_{i = 1}^{N - 1} {{t_{{y_i},{y_{i + 1}}}}} } \]
注:xi, yi表示在编码层输出的值, tyi, yi+1表示转移矩阵的值;最后的值可以看成是总分 - 真实路径得分,这也符合我们的常识,如果所有路径的得分等于真实路径的分的话,那么loss就是0。
5.进行预测
首先我们还是定义Emission score矩阵和Transition score矩阵,这两个矩阵都是已经训练好了的,还是一个句子有3个字
Emission score
| l1 | l2 | |
| w0 | x01 | x02 |
| w1 | x11 | x12 |
| w2 | x21 | x22 |
Transition score
| l1 | l2 | |
| l1 | t11 | t12 |
| l2 | t21 | t22 |
采用Viterbi algorithm来进行预测
w0时
因为w0为第一个字,所有它的最后结果就是[x01, x02],如果第一个时刻编码器对于标签的输出是[0.2, 0.8],那么第一个时刻的标签就为2;因为在第一个时刻,它不从任何地方转移而来。所有没有转移矩阵的作用。
w0->w1时
obs = [x11, x12]
previous = [x01, x02]
previous扩展并复制维度
\[{\rm{pre}}vious = \left( \begin{array}{l}
previous[0],previous[0]\\
previous[1],previous[1]
\end{array} \right) = \left( \begin{array}{l}
{x_{01}},{x_{01}}\\
{x_{02}},{x_{02}}
\end{array} \right)\]
obs扩展并复制维度
\[obs = \left( \begin{array}{l}
obs[0],obs[0]\\
obs[1],obs[1]
\end{array} \right) = \left( \begin{array}{l}
{x_{11}},{x_{12}}\\
{x_{11}},{x_{12}}
\end{array} \right)\]
对previous,obs和转移矩阵求和
\[scores = \left( \begin{array}{l}
{x_{01}},{x_{01}}\\
{x_{02}},{x_{02}}
\end{array} \right) + \left( \begin{array}{l}
{t_{11}},{t_{12}}\\
{x_{21}},{t_{22}}
\end{array} \right) + \left( \begin{array}{l}
{x_{11}},{x_{12}}\\
{x_{11}},{x_{12}}
\end{array} \right) = \left( \begin{array}{l}
{x_{01}} + {t_{11}} + {x_{11}},{x_{01}} + {t_{12}} + {x_{12}}\\
{x_{02}} + {t_{21}} + {x_{11}},{x_{02}} + {t_{22}} + {x_{12}}
\end{array} \right)\]
下面的计算与上节所描述的有所不同
\[previous = [\max (scores[00],scores[10]),\max (scores[01],scores[11])]\]
如果我们的分数如下
\[scores = \left( \begin{array}{l}
{x_{01}} + {t_{11}} + {x_{11}},{x_{01}} + {t_{12}} + {x_{12}}\\
{x_{02}} + {t_{21}} + {x_{11}},{x_{02}} + {t_{22}} + {x_{12}}
\end{array} \right) = \left( \begin{array}{l}
0.2,0.3\\
0.5,0.4
\end{array} \right)\]
这个时刻的previous,这里不用求e指数求和,因为上面设计到了归一化因子,所以才要指数求和,而且上面也说了CRF在设计的时候就提出了假设
\[previous = [\max (scores[00],scores[10]),\max (scores[01],scores[11])] = [0.5,0.4]\]
注:这个表示了在这个时刻每个标签的最大的分值
那么这个时候的路径就为
\[path = [{l_2} \to {l_1}:0.5,{l_2} \to {l_2}:0.4]\]
在w2的时候
obs = [x21, x22]
previous = [0.5, 0.4]
previous扩展并复制维度
\[{\rm{pre}}vious = \left( \begin{array}{l}
previous[0],previous[0]\\
previous[1],previous[1]
\end{array} \right) = \left( \begin{array}{l}
0.5,0.5\\
0.4,0.4
\end{array} \right)\]
obs扩展并复制维度
\[obs = \left( \begin{array}{l}
obs[0],obs[0]\\
obs[1],obs[1]
\end{array} \right) = \left( \begin{array}{l}
{x_{21}},{x_{22}}\\
{x_{21}},{x_{22}}
\end{array} \right)\]
求scores
\[scores = \left( \begin{array}{l}
0.5,0.5\\
0.4,0.4
\end{array} \right) + \left( \begin{array}{l}
{t_{11}},{t_{12}}\\
{t_{21}},{t_{22}}
\end{array} \right) + \left( \begin{array}{l}
{x_{21}},{x_{22}}\\
{x_{21}},{x_{22}}
\end{array} \right) = \left( \begin{array}{l}
0.5 + {t_{11}} + {x_{21}},0.5 + {t_{12}} + {x_{22}}\\
0.4 + {t_{21}} + {x_{21}},0.4 + {t_{22}} + {x_{22}}
\end{array} \right)\]
假如我们的得到的分数为
\[scores = \left( \begin{array}{l}
0.6,0.9\\
0.8,0.7
\end{array} \right)\]
得到previous
\[previous = [0.8,0.9]\]
得到path
\[path = [{l_2} \to {l_2} \to {l_1}:0.8,{l_2} \to {l_1} \to {l_2}:0.9]\]
所以最优路径为
\[{l_2} \to {l_1} \to {l_2}\]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号