ROS launch文件的使用(同时打开多个终端运行)
1.需求
一个程序中可能需要启动多个节点,比如:ROS 内置的小乌龟案例,如果要控制乌龟运动,要启动多个窗口,分别启动 roscore、乌龟界面节点、键盘控制节点。如果每次都调用 rosrun 逐一启动,显然效率低下,如何优化?
官方给出的优化策略是使用 launch 文件,可以一次性启动多个 ROS 节点。
2.实现
-
选定功能包右击 ---> 添加 launch 文件夹
-
选定 launch 文件夹右击 ---> 添加 launch 文件
-
编辑 launch 文件内容
<launch> <node pkg="helloworld" type="demo_hello" name="hello" output="screen" /> <node pkg="turtlesim" type="turtlesim_node" name="t1"/> <node pkg="turtlesim" type="turtle_teleop_key" name="key1" /> </launch>
-
node ---> 包含的某个节点
-
pkg -----> 功能包
-
type ----> 被运行的节点文件
-
name --> 为节点命名
-
output-> 设置日志的输出目标
-
-
运行 launch 文件
roslaunch 包名 launch文件名
-
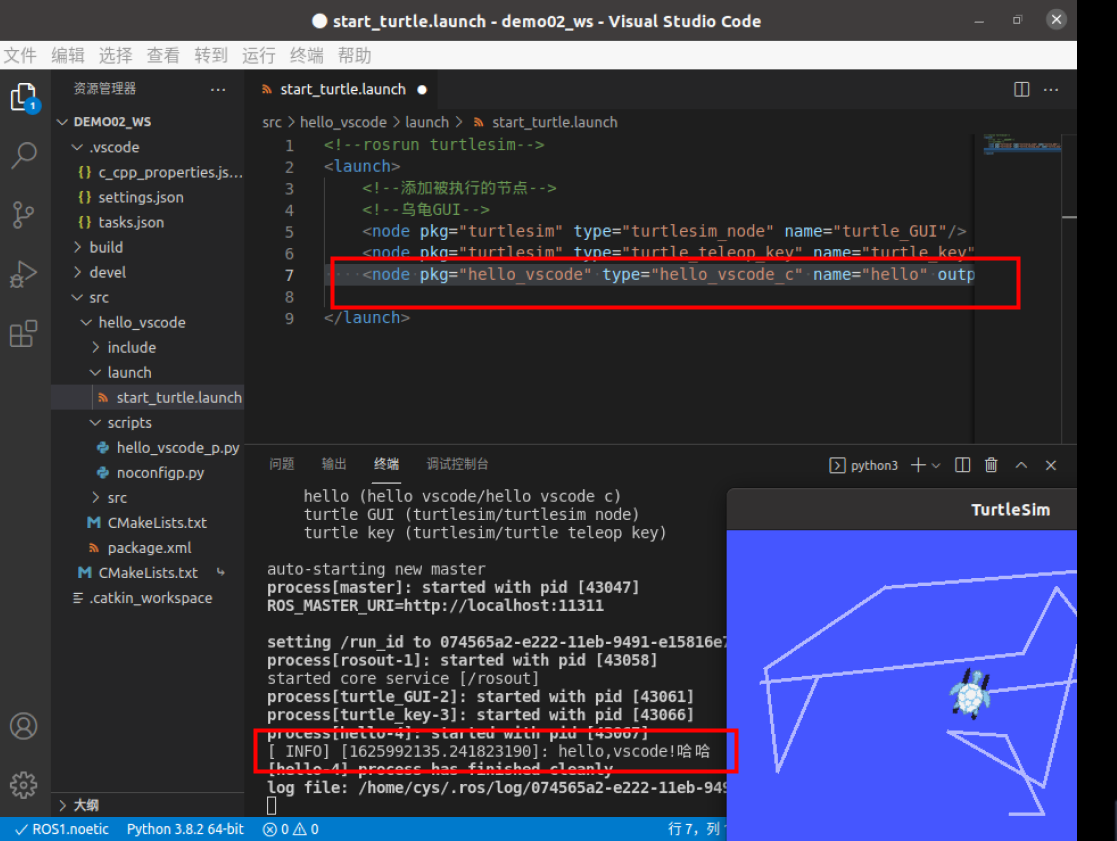
运行结果: 一次性启动了多个节点
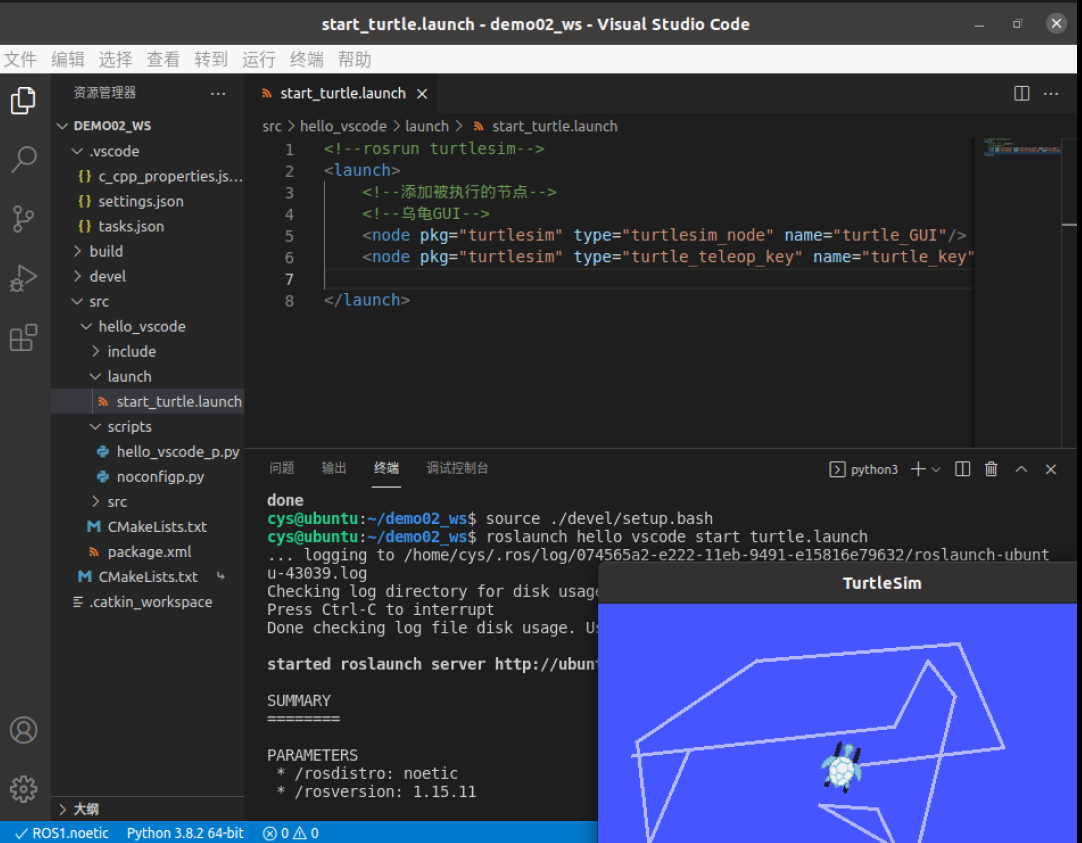
<!--rosrun turtlesim--> <launch> <!--添加被执行的节点--> <!--乌龟GUI--> <node pkg="turtlesim" type="turtlesim_node" name="turtle_GUI"/> <node pkg="turtlesim" type="turtle_teleop_key" name="turtle_key"/> </launch>
运行:ctrl+~(esc下的键)
roslaunch hello_vscode start_turtle.launch
<!--rosrun turtlesim--> <launch> <!--添加被执行的节点--> <!--乌龟GUI--> <node pkg="turtlesim" type="turtlesim_node" name="turtle_GUI"/> <node pkg="turtlesim" type="turtle_teleop_key" name="turtle_key"/> <node pkg="hello_vscode" type="hello_vscode_c" name="hello" output="screen"/> </launch>