

图像锐化算法(Image sharpening):拉普拉斯增强和Unsharp Masking(附代码)
图像锐化算法(Image sharpening):拉普拉斯增强和Unsharp Masking(附代码)
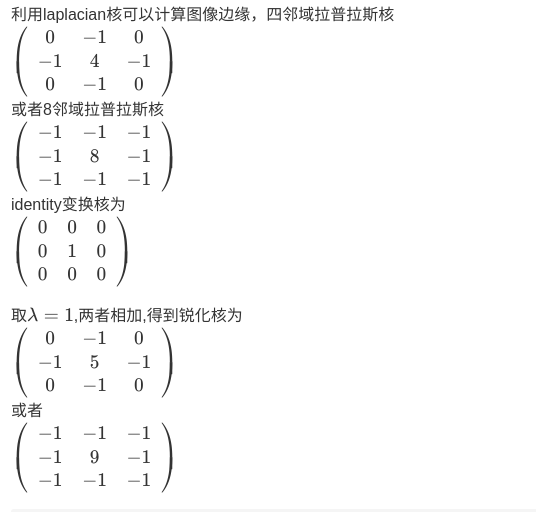
其中是处理前图片,是锐化后,代表增强图像的边缘和细节(高频部分),是增强因子,如下图所示:

1.laplacian 增强
def laplacianSharpen(im, alpha):
k = np.array([[0, 0, 0, ], [0, 1, 0], [0, 0, 0]])+alpha * \
np.array([[0, -1, 0], [-1, 4, -1], [0, -1, 0]])
# k = np.array([[-1, -1, -1], [-1, 9, -1], [-1, -1, -1]])
dst = cv2.filter2D(im, -1, k)
return dst
注:当然也可以不固定为1,原图像加上乘拉普拉斯锐化的结果,控制增强效果,如果觉得过于锐利,可以调小一点。
2.usm和改进usm
usm(unsharp masking):将原图像低通滤波后产生一个模糊图像,原图像与这模糊图像相减得到保留高频成份的图像。再将高频图像用一个参数放大后与原图像叠加,得到增强的图像。
def usmSharpen(src,m,sigma,amount):
blur_img = cv2.GaussianBlur(src, (m, m), sigma)
dst = cv2.addWeighted(src, 1+amount, blur_img, -1*amount, 0)
return dst
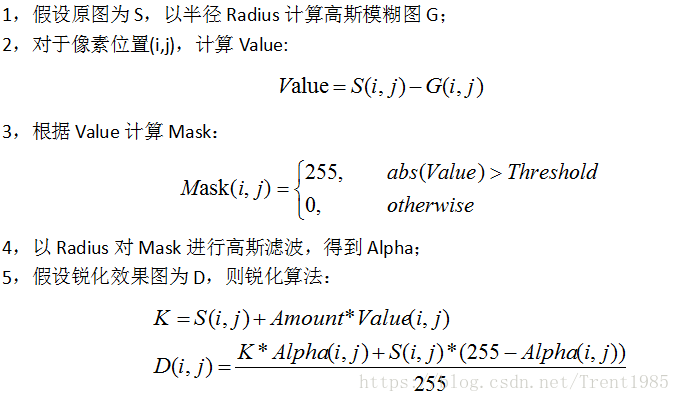
improved usm:
1.假设原图为S,以半径r计算高斯模糊图G
2.value=S(i,j)-G(i,j)
3.锐化后的图为D:
def improveUSM(src, m, sigma, threshold, amount):
blur = cv2.GaussianBlur(src, (m, m), sigma)
diff = src-blur
mask = diff < threshold
dst = cv2.addWeighted(src, 1+amount, blur, -1*amount, 0)
res = src*mask+dst*(1-mask)
return res
注:在使用改进usm时发现出现黑点(尤其是参数高斯模糊半径m变很大时),因为对黑暗区域的增强带来的感觉上更加明显(韦伯定律),所以可以对value为负值时使用更小的增强因子。
def improveUSM2(src, m, sigma, threshold, amount):
'''
reduce black specles
'''
blur = cv2.GaussianBlur(src, (m, m), sigma)
diff = src-blur
mask = cv2.convertScaleAbs(diff) < threshold
dst = np.zeros_like(src, dtype=np.int16)
src = src.astype(np.int16)
blur = blur.astype(np.int16)
diff2 = src-blur
mask2 = diff2 < 0
neg = diff2*mask2
pos = diff2*(1-mask2)
dst = src+amount*pos+amount*0.5*neg
dst = dst.clip(0, 255)
return dst2
另一种usm的优化:
根据阈值比较结果,处理更平滑自然(主要是对mask做了模糊处理)
def improveUSM3(src, m, sigma, threshold, amount):
blur = cv2.GaussianBlur(src, (m, m), sigma)
diff = src-blur
mask = diff < threshold
dst = cv2.addWeighted(src, 1+amount, blur, -1*amount, 0)
mask = mask.astype(np.int16)
mask2 = cv2.GaussianBlur(mask, (m, m), sigma)
res = src*mask2+dst*(1-mask2)
return res
3.其他改进
two drawbacks of USM:
1.noise amplification(噪声也属于高频部分,所以增强细节同时会增强噪声)
2.overshoot effect(见下图)

改进思路,无非是从和两个方面去优化,下面几篇论文,第一篇改进usm的根据阈值截断处理,使用更平滑的处理方式,第二篇是从改变的计算上,使用非线性核(二次滤波器和多项式滤波器)。第三篇和第四篇是从优化上,使得增强因子和位置相关,而非全局的一个常数:
- paper:An image sharpening algorithm based on fuzzy logic
- paper:Nonlinear unsharp masking methods for image contrast enhancement
- paper:rational unsharp masking technique
- paper:Image Enhancement via Adaptive Unsharp Masking
不过上述方法计算复杂,所以具体应用时还应取舍。
桔桔桔桔桔桔桔桔桔桔


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· 阿里巴巴 QwQ-32B真的超越了 DeepSeek R-1吗?
· 如何调用 DeepSeek 的自然语言处理 API 接口并集成到在线客服系统
· 【译】Visual Studio 中新的强大生产力特性
· 2025年我用 Compose 写了一个 Todo App