


Floyd算法
Floyd算法是一种动态规划算法,用于求解有向图中每对顶点间的最短路径。它要求有向图中可以有负权值,但是不能有负的回路,和Dijkstra,Bellman-Ford算法一样,都是不能有负回路的。
设有向图G=(V,E),采用邻接矩阵来表示每对顶点之间的距离d[i][j]。初始时,若i=j,则d[i][j]=0;若i和j之间直接相连,则d[i][j]=Weight(i,j);若i和j之间不直接相连,则d[i][j]=正无穷 OR INT_MAX。
假设节点编号是1,2,3,,,,,,,n
现在要计算顶点<i,j>之间的最短路径,设<i,j>之间最短路径的中间节点的最大节点是k,即中间节点在(1,2,3,,,,k)的范围内,那么现在有2中情况
1。假设k是<i,j>最短路径的中间节点,那么<i,j>可以划分为<i,k>和<k,j>,因为<i,j>的中间节点在(1,2,3,,,,k)之间,并且最短路径是一条简单路径(节点没有重复的路径),那么可以得出路径<i,k>和路径<k,j>的中间节点都在(1,2,3,,,,k-1)范围内,所以有d[i][j]=d[i][k]+d[k][j]并且k>=1&&k<=n
2。假设k不是<i,j>最短路径的中间节点,那么<i,j>的中间节点的范围是(1,2,3,,,,,k-1),那么k时的d[i][j]等于k-1时的d[i][j]
所以,可以得到d[i][j]的值
当k=0时,d[i][j](k=0)=Weight(i,j)
当k>=1时,d[i][j](k)=min(d[i][j](k-1),d[i][k](k-1)+d[k][j](k-1))
所以,在初始化d[i][j]之后,就可以用下面的O(n^3)的算法来表示oyd算法
for(k=1;k<=n;k++)
for(i=1;i<=n;i++)
for(j=1;j<=n;j++)
if(d[i][k]+d[k][j]<d[i][j])
d[i][j]=d[i][k]+d[k][j];
给定1个有向无负回路图,有10个节点,下面是Floyd算法的具体实现
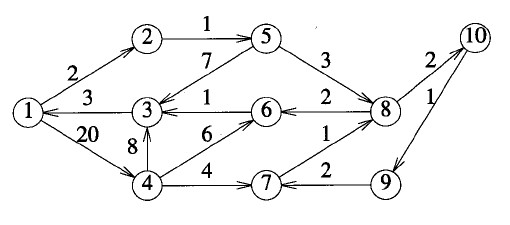
#include<iostream>#include<climits>using namespace std;#define N 11int dis[N][N];int map[N][N];int path[N][N];void init(void){ int i,j; for(i=1;i<N;i++) for(j=1;j<N;j++) if(i==j) map[i][j]=0; else map[i][j]=INT_MAX; map[1][2]=2,map[1][4]=20,map[2][5]=1; map[3][1]=3,map[4][3]=8,map[4][6]=6; map[4][7]=4,map[5][3]=7,map[5][8]=3; map[6][3]=1,map[7][8]=1,map[8][6]=2; map[8][10]=2,map[9][7]=2,map[10][9]=1;}void floyd(void){ int i,j,k; for(i=1;i<N;i++) for(j=1;j<N;j++) { dis[i][j]=map[i][j]; path[i][j]=0; } for(k=1;k<N;k++) for(i=1;i<N;i++) for(j=1;j<N;j++) if(dis[i][k]!=INT_MAX && dis[k][j]!=INT_MAX && (dis[i][k]+dis[k][j]<dis[i][j])) { dis[i][j]=dis[i][k]+dis[k][j]; path[i][j]=k; }}void print(void){ int i,j; for(i=1;i<N;i++) { for(j=1;j<N;j++) cout<<dis[i][j]<<" "; cout<<endl; } }int main(void){ init(); floyd(); print(); return 0;} |
矩阵打印出每对<i,j>节点的最短路径长度,另还可以根据path打印出<i,j>的路径


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 记一次.NET内存居高不下排查解决与启示
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· AI技术革命,工作效率10个最佳AI工具
2012-07-10 [转+]C语言复杂声明