
四元数, Physx中的四元数
四元数的概念 & 如何使用四元数:
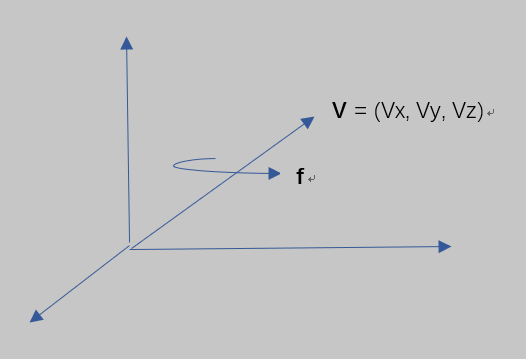
绕V轴旋转 f 角,对应的四元数:
q = ( cos(f/2), Vx*sin(f/2), Vy*sin(f/2), Vz*sin(f/2) )
= cos(f/2) + Vx*sin(f/2)*i + Vy*sin(f/2)*j + Vz*sin(f/2)*k
q的共轭:
q' = ( cos(f/2), -Vx*sin(f/2), -Vy*sin(f/2), -Vz*sin(f/2) ) (不应该用q'这个符号,只是为了方便打字)
当前有空概念中的一个点(Wx, Wy,Wz),求在该旋转下的新坐标W',即绕着V旋转f角, 计算方法如下:
(1)定义一个纯四元数: P = (0, Wx, Wy,Wz)
(2)运算: P' = q*P*q', 该运算的结果P'是一个纯四元数,即第一项为0, P'的后三项即是W'的坐标哦。
同理,若存在一个四元数 q = (q1,q2,q3,q4) = ( cos(f/2), Vx*sin(f/2), Vy*sin(f/2), Vz*sin(f/2) ),则,其对应一个以向量(Vx,Vy,Vz)为轴 旋转f角的动作,右手法则。
四元数的乘法:
四元数有i, j, k三个虚部,i^2 = j^2 = k^2 = i*j*k = -1。
两个四元数p和q相乘的公式:
p*q = (p0,p1,p2,p3) * (q0,q1,q2,q3), 记列向量 P=(p1,p2,p3), Q = (q1,q2,q3)
= (p0*q0 - P*Q, p0*Q + q0*P + P x Q), 其中p0*Q + q0*P + P x Q对应一个三维向量,其三个分量为结果的i,j,k部分。
= [ p0*q0 - p1*q1 - p2*q2 - p3*q3 ]
[ p0*q1 + q0*p1 + p2*q3 - p3*q2]
[ p0*q2 + q0*p2 + p3*q1 - p1*q3]
[ p0*q3 + q0*p3 + p1*q2 - p2*q1]
其中蓝色部分对应的是P x Q得到的向量的三个分量:
P x Q =

Physx引擎中的四元数
physx中的PxTransForm类:https://github.com/NVIDIAGameWorks/PhysX/blob/4.1/pxshared/include/foundation/PxTransform.h
PxQuat类 https://github.com/NVIDIAGameWorks/PhysX/blob/4.1/pxshared/include/foundation/PxQuat.h
class PxTransform { PxQuat q; //四元数类,四个成员变量:(w,x,y,z)。Physx用四元数表示刚体的姿态。 PxVec3 p; //表示刚体的位置 PxVec3 rotate(PxVec3& input) //对输入向量做旋转,返回旋转后的向量 { return q.rotate(input); } .... };
/** rotates passed vec by this (assumed unitary) */ PX_CUDA_CALLABLE PX_FORCE_INLINE const PxVec3 rotate(const PxVec3& v) const { const float vx = 2.0f * v.x; const float vy = 2.0f * v.y; const float vz = 2.0f * v.z; const float w2 = w * w - 0.5f; const float dot2 = (x * vx + y * vy + z * vz); return PxVec3((vx * w2 + (y * vz - z * vy) * w + x * dot2), (vy * w2 + (z * vx - x * vz) * w + y * dot2), (vz * w2 + (x * vy - y * vx) * w + z * dot2)); } /** inverse rotates passed vec by this (assumed unitary) */ PX_CUDA_CALLABLE PX_FORCE_INLINE const PxVec3 rotateInv(const PxVec3& v) const { const float vx = 2.0f * v.x; const float vy = 2.0f * v.y; const float vz = 2.0f * v.z; const float w2 = w * w - 0.5f; const float dot2 = (x * vx + y * vy + z * vz); return PxVec3( (vx * w2 - (y * vz - z * vy) * w + x * dot2), (vy * w2 - (z * vx - x * vz) * w + y * dot2), (vz * w2 - (x * vy - y * vx) * w + z * dot2)); }
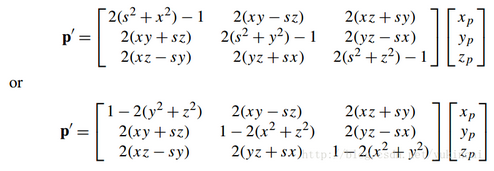
Physx的上面代码经验证,对向量做旋转时,Physx使用的方法同《quaternions for computer graphics》中的方法一致:
存在四元数(s,x,y,z),其中s为scalar part,用其对向量(xp,yp,zp)做一次旋转:
但是,跟该网页提供的matlab计算四元数旋转的方法不同::(https://ww2.mathworks.cn/help/aerotbx/ug/quatrotate.html) 该网页中的第一个简单例子的结果,套用文末的公式,得出不同的结果!
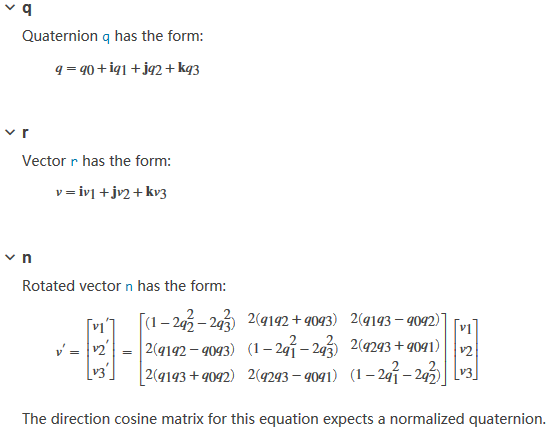
-----------严重怀疑matlab的正确性:
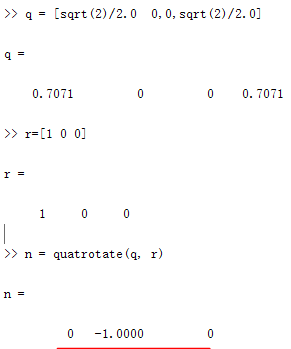
用例子验证:绕Z轴(0,0,1)旋转90°的四元数为( cos(45), 0*sin(45), 0*sin(45), 1*sin(45) ) = (sqrt(2)/2, 0, 0, sqrt(2)/2);
用该四元数旋转(1,0,0):
----使用Physx中的方法结果为(0,1,0)
----使用matlab的计算结果为(0,-1,0), 是沿着反方向转了90°。----- (在physx的方法中,输入的四元数对应的是旋转角度的一般,难道matlab中输入的四元数意义不同吗,默认是左手法则吗,这导致上面的公式中 与书本上的公式有正负号差异吗?待探索)
Physx中的四元数类的使用总结哦:
有全局坐标系A和局部坐标系A’, A经过一定的动作后与A’的姿态重合,(例如,A绕自己的Z(0,0,1)轴旋转90度),该动作可以用一个四元数表示出来(eg. quat(x,y,z ,w) = (0, 0, 1*sin(90/2), cos(90/2)), w为scalar part )。
1) 局部系转到全局系:
存在一个空间向量b,该向量在A’中的表示为b_local=(1,0,0), 则该向量在A中的表示为:
将全局系下的(1,0,0)绕z轴旋转90度(画图便理解): quat.rotate(b_local)。
2)全局系转到局部系:
存在一个空间向量c,该向量在A中的表示为c_local=(1,0,0), 则该向量在A’中的表示为:
方法1:将全局系下的(1,0,0)绕z轴旋转-90度:
quat_new(x,y,z ,w) = (0, 0, 1*sin(-90/2), cos(-90/2))
quat_new.rotate(c_local)。
方法2:quat. rotateInv(c_local)
3)

-----可以得到对应的旋转矩阵啦!
Physx中的PxTransform类的使用总结
https://www.cnblogs.com/butterflybay/p/13276763.html
四元数与欧拉角
关于欧拉角很好文章: https://www.cnblogs.com/21207-iHome/p/6894128.html
四元数转换为欧拉角: (Physx中的四元数类并没有提供这个功能)
1. 开源opengl库https://github.com/g-truc/glm 或许有
2. Unreal Engine中的方法
https://docs.unrealengine.com/4.26/en-US/API/Runtime/Core/Math/FRotator/
https://docs.unrealengine.com/4.27/en-US/API/Runtime/Core/Math/FQuat/
float ClampAxis(float Angle) // degree { // returns Angle in the range (-360,360) Angle = std::fmod(Angle, 360.f); if (Angle < 0.f) { // shift to [0,360) range Angle += 360.f; } return Angle; } float NormalizeAxis(float Angle) // degree { // returns Angle in the range [0,360) Angle = ClampAxis(Angle); if (Angle > 180.f) { // shift to (-180,180] Angle -= 360.f; } return Angle; } // Refer to FRotator::FRotator(const FQuat& Quat); std::vector<float> QUat2Euler(const float X, const float Y, const float Z, const float W) { // const float SingularityTest = Z * X - W * Y; const float YawY = 2.f * (W * Z + X * Y); const float YawX = (1.f - 2.f * (Y*Y + Z*Z)); // reference // http://en.wikipedia.org/wiki/Conversion_between_quaternions_and_Euler_angles // http://www.euclideanspace.com/maths/geometry/rotations/conversions/quaternionToEuler/ // this value was found from experience, the above websites recommend different values // but that isn't the case for us, so I went through different testing, and finally found the case // where both of world lives happily. const float SINGULARITY_THRESHOLD = 0.4999995f; const float PI = 3.1415926535897932f; const float RAD_TO_DEG = (180.f) / PI; const float DEG_TO_RAD = PI /(180.f); float Pitch = 0.0f; float Yaw = 0.0f; float Roll = 0.0f; if (SingularityTest < -SINGULARITY_THRESHOLD) { Pitch = -90.f; Yaw = std::atan2(YawY, YawX) * RAD_TO_DEG; Roll = NormalizeAxis(-Yaw - (2.f * std::atan2(X, W) * RAD_TO_DEG)); } else if (SingularityTest > SINGULARITY_THRESHOLD) { Pitch = 90.f; Yaw = std::atan2(YawY, YawX) * RAD_TO_DEG; Roll = NormalizeAxis(Yaw - (2.f * std::atan2(X, W) * RAD_TO_DEG)); } else { Pitch = std::asin(2.f * (SingularityTest)) * RAD_TO_DEG; Yaw = std::atan2(YawY, YawX) * RAD_TO_DEG; Roll = std::atan2(-2.f * (W * X + Y * Z), (1.f - 2.f * (X*X + Y*Y))) * RAD_TO_DEG; } std::cout << "Roll, Pitch, Yaw: " << Roll << " " << Pitch << " " << Yaw << std::endl; return std::vector<float>{Roll, Pitch, Yaw}; // degree }
3. wiki 现成函数
https://en.wikipedia.org/wiki/Conversion_between_quaternions_and_Euler_angles#Quaternion_to_Euler_angles_conversion
struct Quaternion { double w, x, y, z; }; struct EulerAngles { double roll, pitch, yaw; }; EulerAngles ToEulerAngles(Quaternion q) { EulerAngles angles; // roll (x-axis rotation) double sinr_cosp = 2 * (q.w * q.x + q.y * q.z); double cosr_cosp = 1 - 2 * (q.x * q.x + q.y * q.y); angles.roll = std::atan2(sinr_cosp, cosr_cosp); // pitch (y-axis rotation) double sinp = 2 * (q.w * q.y - q.z * q.x); if (std::abs(sinp) >= 1) angles.pitch = std::copysign(M_PI / 2, sinp); // use 90 degrees if out of range else angles.pitch = std::asin(sinp); // yaw (z-axis rotation) double siny_cosp = 2 * (q.w * q.z + q.x * q.y); double cosy_cosp = 1 - 2 * (q.y * q.y + q.z * q.z); angles.yaw = std::atan2(siny_cosp, cosy_cosp); return angles; }
其他:

Matlab: 四元数与欧拉角转换
https://www.mathworks.com/help/fusion/ref/quaternion.eulerd.html
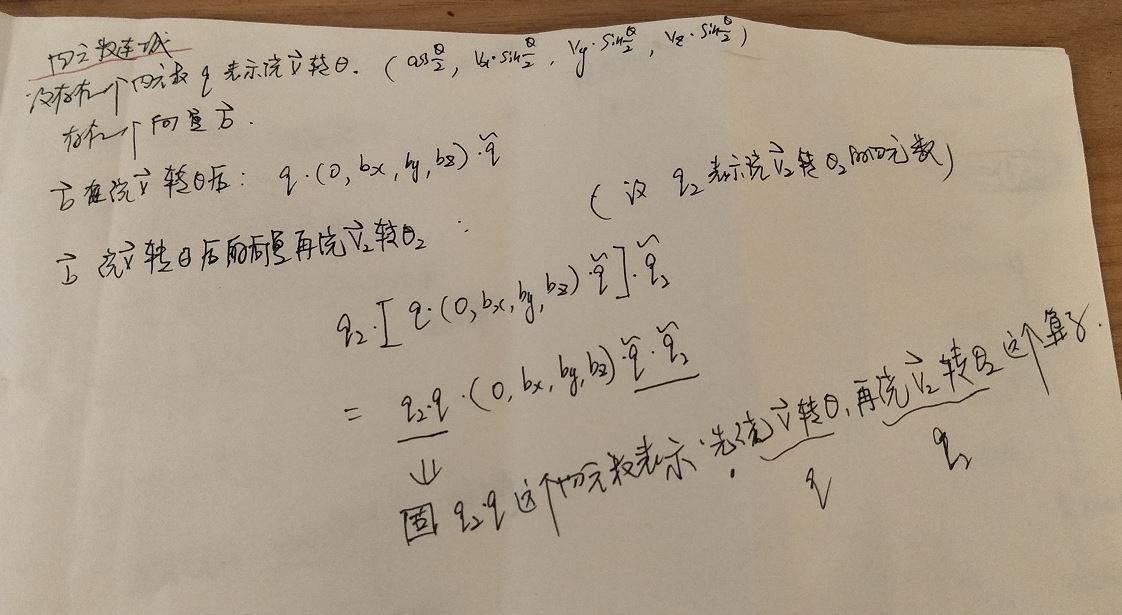
四元数连乘的意义
以下自自己想的,还没看其他资料的解释,应该是对的吧:
“现在主流游戏或动画引擎都会以 缩放向量+旋转四元数+平移向量的形式进行存储角色的运动数据。”
https://www.zhihu.com/question/23005815/answer/33971127、
https://zhuanlan.zhihu.com/p/27471300
https://www.zhihu.com/topic/19594299/top-answers
经典书: 《quaternions for computer graphics 》https://max.book118.com/html/2018/0220/153945618.shtm
===2019.10.26 将physx中的class PxTransform类的四元数旋转函数终于搞清楚了:
查阅的链接:
https://docs.nvidia.com/gameworks/content/gameworkslibrary/physx/apireference/files/
https://docs.nvidia.com/gameworks/content/gameworkslibrary/physx/apireference/files/hierarchy.html
http://www.doc88.com/p-805243984870.html
https://ww2.mathworks.cn/help/robotics/ref/eul2quat.html
https://ww2.mathworks.cn/help/robotics/ref/quaternion.rotmat.html
https://ww2.mathworks.cn/help/robotics/ref/quaternion.mtimes.html
https://ww2.mathworks.cn/help/robotics/ref/quaternion.html
该文章相当好:
http://www.geeks3d.com/20141201/how-to-rotate-a-vertex-by-a-quaternion-in-glsl/
摘录在此:
In a vertex shader, the rotation and position are usually encoded in the model matrix and we have something like this:
vec4 worldPos = ModelMatrix * InPosition; -- 旋转矩阵的形式
Here is another method to transform the position of a vertex, using a quaternion to hold the rotation information. Quaternions are a fantastic mathematics tool discovered by Sir William Rowan Hamilton in 1843. We’re not going to review quaternions in detail here, because I’m not a mathematician and it’s not the point. We’re going to see how to use them in practice in a GLSL program to rotate a vertex.
A quaternion can be seen as a object that holds a rotation around any axis. A quaternion is a 4D object defined as follows:
q = [s, v] q = [s + xi + yj + zk]
where s, x, y and z are real numbers. s is called the scalar part while x, y and z form the vector part. i, j and k are imaginary numbers. Quaternions are the generalization of complex numbers in higher dimensions.
In 3D programming, we store quaternions in a 4D vector:
q = [x, y, z, w] -- x,y,z对应向量部分。
where w = s and [x, y, z] = v.
Now let’s see the fundamental relation that makes it possible to rotate a point P0 around an rotation axis encoded in the quaternion q:
P1 = q P0 q-1
where P1 is the rotated point and q-1 is the inverse of the quaternion q (q的共轭).
From this relation we need to know:
1 – how to transform a rotation axis into a quaternion.
2 – how to transform a position into a quaternion.
3 – how to get the inverse of a quaternion.
4 – how to multiply two quaternions.
Remark: all the following rules expect an unit quaternion. An unit quaternion is a quaternion with a norm of 1.0. A quaternion can be normalized with:
norm = sqrt(q.x*q.x + q.y*q.y + q.z*q.z + q.w*q.w) q.x = q.x / norm q.y = q.y / norm q.z = q.z / norm q.w = q.w / norm
1 – How to transform a rotation axis into a quaternion
Here is a formula that converts a rotation around an axis (defined by the couple [axis, angle]) into a quaternion:
绕向量(axis.x, axis.y, axis.z)旋转angle对应的四元数:
half_angle = angle/2 q.x = axis.x * sin(half_angle) q.y = axis.y * sin(half_angle) q.z = axis.z * sin(half_angle) q.w = cos(half_angle)
2 – How to transform a position into a quaternion
The position is usually a 3D vector: {x, y, z}. This position can be represented in a quaternion by setting to zero the scalar part and initializing the vector part with the xyz-position:
q.x = position.x q.y = position.y q.z = position.z q.w = 0
The quaternion q=[x, y, z, 0] is a pure quaternion because it has not real part.
------- 这部分的作用应该是:要对向量{x, y, z}基于四元数做旋转时,需要先将该向量转换为一个纯四元数。
3 – How to get the inverse of a quaternion
The inverse of a quaternion is defined by the following relation:
q = [x, y, z, w] norm = |q| = sqrt(q.x*q.x + q.y*q.y + q.z*q.z + q.w*q.w) q
-1
= [-x, -y, -z, w] / |q| -------------------------------------------即,将旋转角取反。 q
-1
= [-x/|q|, -y/|q|, -z/|q|, w/|q|]
If we have an unit quaternion, |q|=1 and the inverse is equal to the conjugate (q*) of the quaternion: ---- 看来四元数q的逆等于其共轭除以其模长。
q
-1
= q
*
= [-x, -y, -z, w]
4 – How to multiply two quaternions
Quaternions can be multiplied:
q = q1 * q2
But like for matrix multiplication, quaternion multiplication is non-commutative:
(q1 * q2) != (q2 * q1)
The multiplication of two quaternions is defined by:
q.x = (q1.w * q2.x) + (q1.x * q2.w) + (q1.y * q2.z) - (q1.z * q2.y) q.y = (q1.w * q2.y) - (q1.x * q2.z) + (q1.y * q2.w) + (q1.z * q2.x) q.z = (q1.w * q2.z) + (q1.x * q2.y) - (q1.y * q2.x) + (q1.z * q2.w) q.w = (q1.w * q2.w) - (q1.x * q2.x) - (q1.y * q2.y) - (q1.z * q2.z)
Now we have all tools to rotate a point around an axis in a GLSL vertex shader:
#version 150 in vec4 gxl3d_Position; in vec4 gxl3d_TexCoord0; in vec4 gxl3d_Color; out vec4 Vertex_UV; out vec4 Vertex_Color; uniform mat4 gxl3d_ViewProjectionMatrix; struct Transform { vec4 position; vec4 axis_angle; }; uniform Transform T; vec4 quat_from_axis_angle(vec3 axis, float angle) -- 给定一个向量,以及绕该向量旋转的角,求其对用的四元数 { vec4 qr; float half_angle = (angle * 0.5) * 3.14159 / 180.0; qr.x = axis.x * sin(half_angle); qr.y = axis.y * sin(half_angle); qr.z = axis.z * sin(half_angle); qr.w = cos(half_angle); return qr; } vec4 quat_conj(vec4 q)------------------------------给定一个四元数,求其共轭 { return vec4(-q.x, -q.y, -q.z, q.w); } vec4 quat_mult(vec4 q1, vec4 q2)---------------------给定两个四元数,求其乘积 { vec4 qr; qr.x = (q1.w * q2.x) + (q1.x * q2.w) + (q1.y * q2.z) - (q1.z * q2.y); qr.y = (q1.w * q2.y) - (q1.x * q2.z) + (q1.y * q2.w) + (q1.z * q2.x); qr.z = (q1.w * q2.z) + (q1.x * q2.y) - (q1.y * q2.x) + (q1.z * q2.w); qr.w = (q1.w * q2.w) - (q1.x * q2.x) - (q1.y * q2.y) - (q1.z * q2.z); return qr; } vec3 rotate_vertex_position(vec3 position, vec3 axis, float angle)----给定一个轴以及绕该轴旋转的角,以及一个空间向量,求该向量绕该轴旋转后的向量 { vec4 qr = quat_from_axis_angle(axis, angle); vec4 qr_conj = quat_conj(qr); vec4 q_pos = vec4(position.x, position.y, position.z, 0); vec4 q_tmp = quat_mult(qr, q_pos); qr = quat_mult(q_tmp, qr_conj); return vec3(qr.x, qr.y, qr.z); } void main() { vec3 P = rotate_vertex_position(gxl3d_Position.xyz, T.axis_angle.xyz, T.axis_angle.w); P += T.position.xyz; gl_Position = gxl3d_ViewProjectionMatrix * vec4(P, 1); Vertex_UV = gxl3d_TexCoord0; Vertex_Color = gxl3d_Color; }
This powerful vertex shader comes from the host_api/RubikCube/Cube_Rotation_Quaternion/demo_v3.xml demo you can find in the code sample pack. To play with this demo, GLSL Hacker v0.8+ is required.
Some references:
- Quaternions
- Quaternions and spatial rotation
- Understanding Quaternions
- Quaternions – transforming spatials – Kri, modern OpenGL 3 engine
- Book: Mathematics for Computer Graphics by John Vince

