论文笔记:Deep Attentive Tracking via Reciprocative Learning
Deep Attentive Tracking via Reciprocative Learning
NIPS18_tracking
Type:Tracking-By-Detection
本篇论文地主要创新是在将注意机制引入到目标跟踪
摘要:源自认知神经科学地视觉注意促进人类对相关的内容的感知。近些年大量工作将注意机制引入到计算机视觉系统中。对于视觉跟踪来说,面临的最大问题在于目标外表的大尺度变化。自注图通过选择性关注临时的鲁棒特征提升视觉跟踪的性能。当前的一些检测跟踪算法主要使用额外的自注模型来生成特征权重,然而分类器并没有采用自注机制。在本文章=中,我们提出一种 reciprocative learning algorithm 算法在训练深度分类器时探索视觉自注机制。该算法由前馈与反馈操作两部分来产生自注图,该图作为正则项与分类LOSS一起训练。该深度分类器习得关注目标区域特征。相关的实验结果证实了该算法达到了极佳的跟踪效果。
引言
近年来。针对不同的视觉应用由此发展出各种各样的跟踪算法,其中视觉注意在视频中目标跟踪起了很大的作用。例如基于DCF的跟踪算法用一张高斯响应特征图表示输入的特征。很多人采用经验空间权重抑制由傅里叶变换过程中的边界效应。从视觉注意角度来说,空间权重也是自注图的一种表现形式。当目标由大尺度变化时,这种空间权重自注图就无法过多的注意边界的响应,从而错误的目标定位。
另一方面,two-stage tracking-by-detection 方法首先采集大量样本,对每一样本进行分类判断前景还是背景。视觉注意在这一方面有很大的潜能。现存的深度跟踪算法大多利用额外的注意模型来生成特征权重。自注机制需要经常以便可以学习到目标的最新特征,可以更好的将目标与背景区分。在本文中,作者直接训练一个自注分类器,整个训练过程包括前馈和反馈两步。在前馈这一步中,将图片输入网络,得到分类score;在反馈这一步中,将第一层网络的导数作为自注图(attention map),将自注图作为一个正则项作为LOSS函数中的一员进行训练。网络参数采用传统的反向传播进行更新。因此该深度分类器可以有效的学习目标相关区域的特征,同时有效地减少了背景的干扰。在测试的过程本网络的权重不进行更新,仅仅输出分类的score。
本文的主要贡献:
- 提出一个用于视觉自注的学习算法
- 将自注图作为loss函数的一项进行训练,使其关注目标的特征
- 通过与其他算法在相关数据集上的对比,我们的算法在性能上取得不错的结果
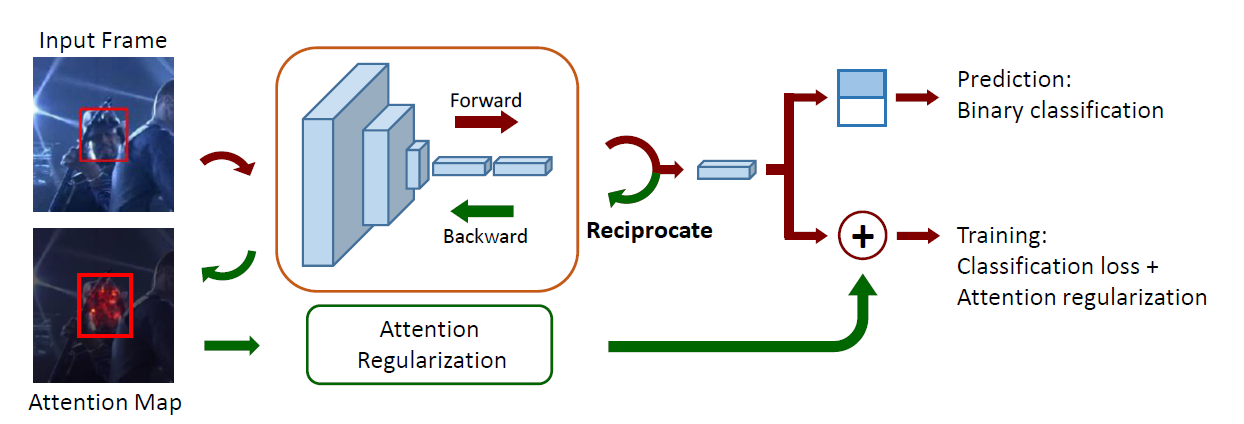
本文提出的跟踪算法训练过程

 浙公网安备 33010602011771号
浙公网安备 33010602011771号