

SVD降维
SVD(Singular Value Decomposition,奇异值分解)是对矩阵进行分解,假如待分解的矩阵A是一个m*n矩阵,那么对矩阵A的SVD分解即:A=U∑VT。
其中U是一个m*m的矩阵;Σ是一个m*n的矩阵,Σ除了主对角线上的元素以外其他元素全为0,主对角线上元素称为奇异值;V是一个n*n矩阵。
将A视为一个线性变换,可以将A分解为旋转+拉伸+旋转的线性变换【左乘一个正交矩阵是旋转,左乘一个对角阵是拉伸变换】
 →
→ 
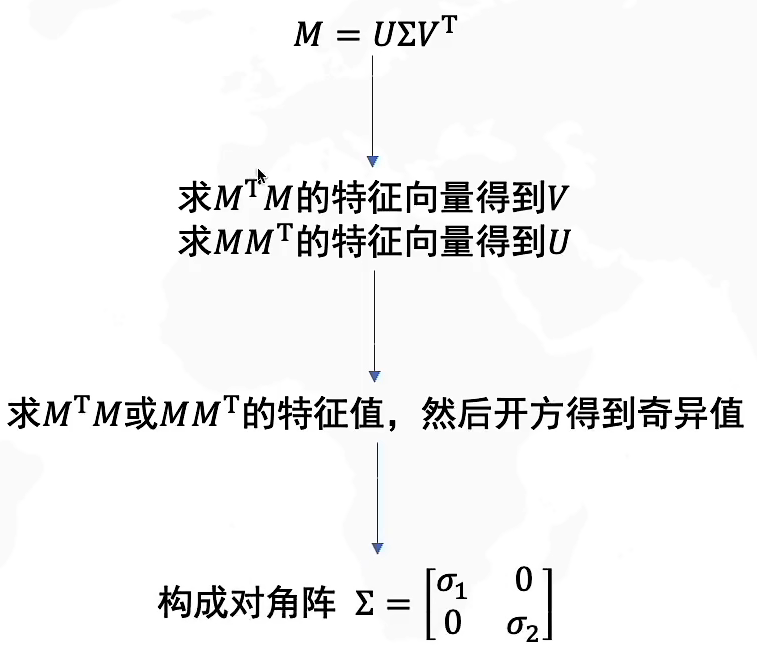
如何求解SVD

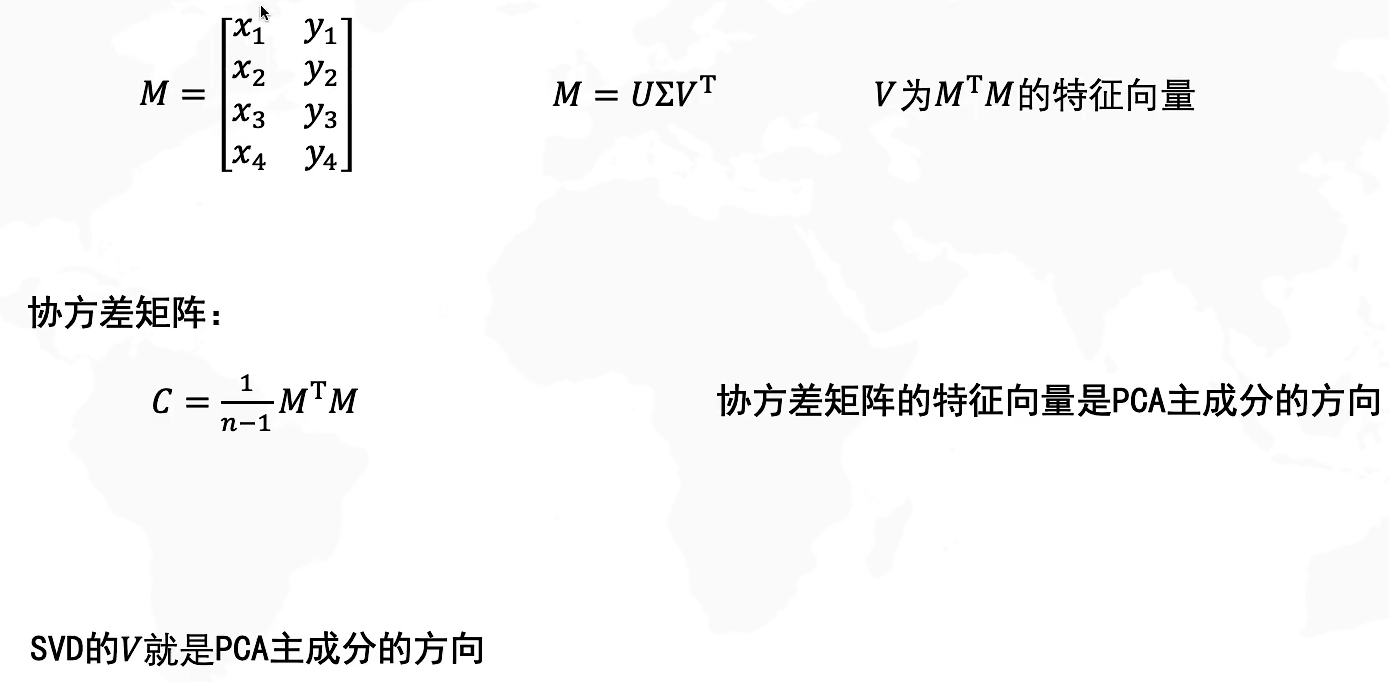
SVD和PCA主成分的关系
SVD在计算过程中原矩阵的维度其实是不变的 ,但是在取n%的奇异值时,重新计算回去的原矩阵中元素值显著降低,秩也降低,整体来看数据得到了压缩和衰减;或许可以理解为一种降维吧。
PCA降维:
- 两个矩阵相乘的意义是将右边矩阵中的每一列向量ai变换到左边矩阵中以每一行行向量为基所表示的空间中去。
- 如何选择基才是最优的。一种直观的看法是:希望投影后的投影值尽可能分散,因为如果重叠就会有样本消失。当然这个也可以从熵的角度进行理解,熵越大所含信息越多。
- 数值的分散程度,可以用数学上的方差来表述。于是上面的问题被形式化表述为:寻找一个一维基,使得所有数据变换为这个基上的坐标表示后,方差值最大。
- 在一维空间中我们可以用方差来表示数据的分散程度。对于高维数据,我们用协方差进行约束,协方差可以表示两个变量的相关性。为了让两个变量尽可能表示更多的原始信息,我们希望它们之间不存在线性相关性,因为相关性意味着两个变量不是完全独立,必然存在重复表示的信息。
- 降维问题的优化目标:将一组 N 维向量降为 K 维,其目标是选择 K 个单位正交基,使得原始数据变换到这组基上后,各变量两两间协方差为 0,而变量方差则尽可能大(在正交的约束下,取最大的 K 个方差)。
- 优化目标变成了寻找一个矩阵 P,满足PCPT是一个对角矩阵,并且对角元素按从大到小依次排列,那么 P 的前 K 行就是要寻找的基,用 P 的前 K 行组成的矩阵乘以 X 就使得 X 从 N 维降到了 K 维并满足上述优化条件。
设有 m 条 n 维数据。
- 将原始数据按列组成 n 行 m 列矩阵 X;
- 将 X 的每一行进行零均值化,即减去这一行的均值;
- 求出协方差矩阵
;
- 求出协方差矩阵的特征值及对应的特征向量;
- 将特征向量按对应特征值大小从上到下按行排列成矩阵,取前 k 行组成矩阵 P;
即为降维到 k 维后的数据。
LDA降维(有监督)

类内散度矩阵 为:
类间散度矩阵 为:
优化目标重新定义:
LDA算法流程
-
计算类内散度矩阵Sω
- 计算类间散度矩阵Sb
- 计算矩阵
- 计算
的最大的d个特征值和对应的d个特征向量
得到投影矩阵W
- 对样本集中的每一个样本特征
,转为新的样本
- 得到输出样本集
ICA降维
动机源自于cocktail party problem(鸡尾酒会问题),ICA与被称为盲源分离(Blind Source Separation,BSS)或盲信号分离的方法具有非常密切的关系。“源”在此处的意思是指原始信号,即独立成分,如鸡尾酒会中的说话者;而“盲”表示我们对于混合矩阵所知甚少,仅仅对源信号做非常弱的假定。
ICA假设的三个条件
- 独立成分被假设是统计独立。对于这一条可以从概率密度以及其他算法可以判断。我们说随机变量y1,y2..yn独立,是指在i≠j时,有关yi的取值情况对于yj如何取值没有提供任何信息。
- 独立成分具有非高斯分布。如果观测到的变量具有高斯分布,那么ICA在本质上是不可能实现的。假定S经过混合矩阵A后,他们的联合概率密度仍然不变化,因此我们没有办法在混合中的得到混合矩阵的信息。
- 假设混合矩阵是方阵。这个条件是为了后续ICA算法求解的便利。当混合矩阵A是方阵时就意味着独立源的个数和监测信号的个数数目是一致。
ICA算法步骤
观测信号构成一个混合矩阵,通过数学算法进行对混合矩阵A的逆进行近似求解分为三个步骤:
1) 去均值。去均值也就是中心化,实质是使信号X均值是零。
2) 白化。白化就是去相关性。
3) 构建正交系统。在常用的ICA算法基础上已经有了一些改进,形成了fastICA算法。fastICA实际上是一种寻找wTz(即Y=wTz)wTz(即Y=wTz)的非高斯最大的不动点迭代方案。
以上有较多的数学推导,这里就省略了,下面给出fastICA的算法流程:
- 观测数据的中心化
- 数据白化
- 选择需要估计的分量个数m,设置迭代次数和范围
- 随机选择初始权重
- 选择非线性函数
- 迭代
- 判断收敛,是下一步,否则返回步骤6
- 返回近似混合矩阵的逆矩阵
TSNE降维
t-SNE(TSNE)将数据点之间的相似度转换为概率。原始空间中的相似度由高斯联合概率表示,嵌入空间的相似度由“t分布”表示。
SNE是通过仿射(affinitie)变换将数据点映射到概率分布上,主要包括两个步骤:
- SNE构建一个高维对象之间的概率分布,使得相似的对象有更高的概率被选择,而不相似的对象有较低的概率被选择。
- SNE在低维空间里在构建这些点的概率分布,使得这两个概率分布之间尽可能的相似。
t-SNE模型是非监督的降维,他跟kmeans等不同,他不能通过训练得到一些东西之后再用于其它数据(比如kmeans可以通过训练得到k个点,再用于其它数据集,而t-SNE只能单独的对数据做操作,也就是说他只有fit_transform,而没有fit操作)
尽管SNE提供了很好的可视化方法,但是他很难优化,而且存在”crowding problem”(拥挤问题)。后续中,Hinton等人又提出了t-SNE的方法。与SNE不同,主要如下:
- 使用对称版的SNE,简化梯度公式
- 低维空间下,使用t分布替代高斯分布表达两点之间的相似度

 浙公网安备 33010602011771号
浙公网安备 33010602011771号