Jetson安装与设置
1. 系统配置
1.1. 供电模式的切换
1.1.1. MaxN模式
jetson nano 开发板在预设的10W(MAXN)模式下需要用5v4A的DC供电。
用5v2A的DC或者micro-usb供电建议使用5W模式。
供电不足会导致掉电关机。
Jetson Nano采用高效电源管理集成电路(PMIC),稳压器和电源树设计可优化电源效率。 它支持两种电源模式,例如5W和MaxN(10W)。 每种模式允许多种配置,具有各种CPU频率和在线核心数。
您可以通过以预限定值限制内存,CPU和GPU频率以及内核数量,将模块限制为预定义配置。
下表显示了NVIDIA预定义的电源模式以及模块资源使用的相关上限。
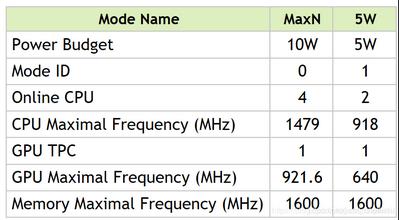
默认的模式是:MaxN(10W)(对应ID 0).
切换模式:
sudo /usr/sbin/nvpmodel -m <x>
其中对应的是 mode ID, 比如 0 或 1。
设置电源模式后,模块将保持该模式,直到您进行更改。该模式在电源循环和SC7之间持续存在。
1.1.2. 定义自定义模式
要定义自己的自定义模式,请将模式定义添加到文件 etc/nvpmodel/nvpmodel_t210_jetson-nano.conf 中,以下是模式1的示例:
# MAXN is the NONE power model to release all constraints
< POWER_MODEL ID=0 NAME=MAXN >
CPU_ONLINE CORE_0 1
CPU_ONLINE CORE_1 1
CPU_ONLINE CORE_2 1
CPU_ONLINE CORE_3 1
CPU_A57 MIN_FREQ 0
CPU_A57 MAX_FREQ -1
GPU_POWER_CONTROL_ENABLE GPU_PWR_CNTL_EN on
GPU MIN_FREQ 0
GPU MAX_FREQ -1
GPU_POWER_CONTROL_DISABLE GPU_PWR_CNTL_DIS auto
EMC MAX_FREQ 0
< POWER_MODEL ID=1 NAME=5W >
CPU_ONLINE CORE_0 1
CPU_ONLINE CORE_1 1
CPU_ONLINE CORE_2 0
CPU_ONLINE CORE_3 0
CPU_A57 MIN_FREQ 0
CPU_A57 MAX_FREQ 918000
GPU_POWER_CONTROL_ENABLE GPU_PWR_CNTL_EN on
GPU MIN_FREQ 0
GPU MAX_FREQ 640000000
GPU_POWER_CONTROL_DISABLE GPU_PWR_CNTL_DIS auto
EMC MAX_FREQ 1600000000
# mandatory section to configure the default mode
< PM_CONFIG DEFAULT=0 >
CPU的频率单位是千赫兹(KHz)。 GPU和EMMC的单位是赫兹(Hz)。 您必须在ID字段中为每个自定义模式分配唯一ID。
测试您的自定义模式以确定:
- 要使用的活动核心数
- 为GPU,EMC和每个CPU群集设置的频率
您设置的频率受模式0中定义的MaxN限制的约束。
1.2. jetson_clocks脚本
默认情况下,DVFS已启用,CPU/GPU/EMC时钟将根据负载而变化。
/usr/bin/jetson_clocks:是禁用DVFS并将CPU/GPU/EMC时钟设置为最大值的脚本。
2. 安装 jtop
先安装依赖:
sudo apt-get install git cmake
sudo apt-get install python3-dev
sudo apt-get install libhdf5-serial-dev hdf5-tools
sudo apt-get install libatlas-base-dev gfortran
然后通过pip安装:
pip3 install --upgrade pip
pip3 install jetson-stats
运行 jtop 启动即可。

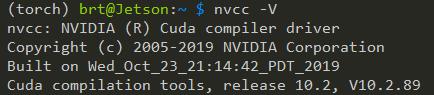
3. 配置CUDA
jetson nano 2GB 默认已经安装了 CUDA10.2 ,但是直接运行 nvcc -V 是不会成功的,需要你把CUDA的路径写入环境变量中。
export CUBA_HOME=/usr/local/cuda
export LD_LIBRARY_PATH=/usr/local/cuda/lib64:$LD_LIBRARY_PATH
export PATH=/usr/local/cuda/bin:$PATH
显卡(GPU),显卡驱动,和cuda之间是怎样的关系?
硬件,底层接口,应用程序接口!
还有一个叫做cuDNN,是针对深度卷积神经网络的加速库
查看CUDA版本:
-
方法1: 查看文件
cat /usr/local/cuda/version.txt -
方法2:
nvcc --version
3.1. cuDNN
查看cuDNN版本
cat /usr/local/cuda/include/cudnn.h | grep CUDNN_MAJOR -A 2
但无法查询到jetson的cuDNN。实际上官方镜像已经包含了cuDNN。集成在apt软件包中,所以目录并不在 /usr/local 下面,而是 /usr/include/aarch64-linux-gnu/cudnn_version_v8.h 。
4. 安装pytorch
pytorch:
wget https://nvidia.box.com/shared/static/wa34qwrwtk9njtyarwt5nvo6imenfy26.whl -O torch-1.7.0-cp36-cp36m-linux_aarch64.whl
sudo apt-get install python3-pip libopenblas-base libopenmpi-dev
pip3 install Cython
pip3 install numpy torch-1.7.0-cp36-cp36m-linux_aarch64.whl
torchvision:
$ sudo apt-get install libjpeg-dev zlib1g-dev libpython3-dev libavcodec-dev libavformat-dev libswscale-dev
$ git clone --branch <version> https://github.com/pytorch/vision torchvision # see below for version of torchvision to download
$ cd torchvision
$ export BUILD_VERSION=0.x.0 # where 0.x.0 is the torchvision version
$ sudo python3 setup.py install # use python if installing for Python 2.7
$ cd ../ # attempting to load torchvision from build dir will result in import error
$ pip install 'pillow<7' # always needed for Python 2.7, not needed torchvision v0.5.0+ with Python 3.6
例如: git clone --branch v0.8.1 git@gitee.com:brt2/torchvision.git
pytorch 与 torchvision 之间的对应关系:
PyTorch v1.0 - torchvision v0.2.2
PyTorch v1.1 - torchvision v0.3.0
PyTorch v1.2 - torchvision v0.4.0
PyTorch v1.3 - torchvision v0.4.2
PyTorch v1.4 - torchvision v0.5.0
PyTorch v1.5 - torchvision v0.6.0
PyTorch v1.6 - torchvision v0.7.0
PyTorch v1.7 - torchvision v0.8.1
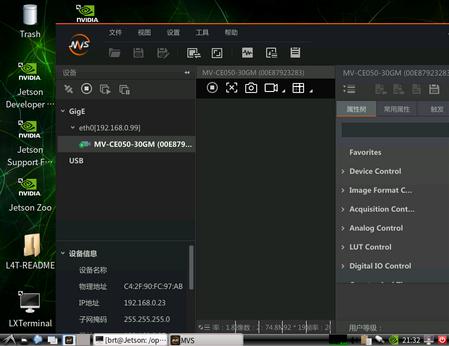
5. 安装海康相机
下载>进入海康威视工业摄像头官网,找到Linux系统ARM架构的安装包下载。

但这个是针对ubuntu16.04的版本。运行时报错:

执行 ldd ./MVS 发现少
libicui18n.so.55
libicuuc.so.55
两个动态库。通过 sudo find / -iname "libicu*" 查找发现系统的 libicui18n.so libicuuc.so 是60版本,这和需要的55版本都“隔代”了。
请在这里下载 包文件
wget https://mirrors.tuna.tsinghua.edu.cn/ubuntu- ports/pool/main/i/icu/libicu55_55.1-7_arm64.deb
dpkg -i libicu55_55.1-7_arm64.deb
然后运行即可正常启动MVS。
6. 安装OpenCV(With CUDA)
7. 部署PaddlePaddle模型(如PaddleOCR、PP-YOLO)
csdn: 在Jetson nano上编译paddle(带TensorRT)并跑通Paddle-Inference-Demo
如何在Jetson nano上同时编译TensorRT与Paddle Lite框架
PaddlePaddle对硬件的支持还是很缓慢的,所以目前没有发现对Jetson的支持。但从v2.0开始,Paddle2ONNX最新升级:飞桨模型全面支持ONNX协议啦!。所以,例如PaddleOCR等项目可以通过转换成ONNX的模型实现运行。
ONNX协议是由微软开发维护,支持范围很广,并且,ONNXRunTime支持GPU的运算。
更值得庆幸的是,从2020年底,ONNXRunTime_v1.6.0开始支持Jetson。
# Download pip wheel from location mentioned above
$ wget https://nvidia.box.com/shared/static/49fzcqa1g4oblwxr3ikmuvhuaprqyxb7.whl -O onnxruntime_gpu-1.6.0-cp36-cp36m-linux_aarch64.whl
# Install pip wheel
$ pip3 install onnxruntime_gpu-1.6.0-cp36-cp36m-linux_aarch64.whl

 浙公网安备 33010602011771号
浙公网安备 33010602011771号