


PID算法
还是money好使,直接买了一个能看得懂的PID教程:http://t.elecfans.com/1403.html;
位置式PID;
增量式PID;
P项是比例项,主要是设定值和当前值两者之差和比例系数的乘积,反应的是当前偏差;
I项是积分项,主要是采样曲线在采样时间上的积分和给定系数的乘积。反应的是历史偏差;
D项是微分项,主要是采样曲线的末端求导结果和给定系数的乘积。反映的是变化趋势;
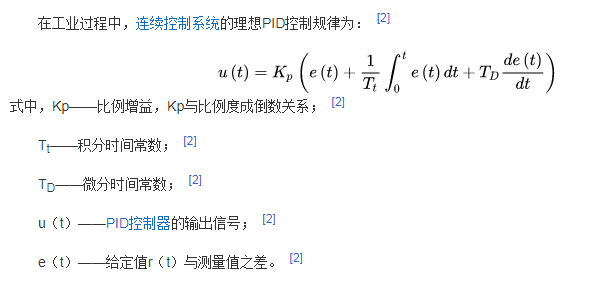
下面是PID的百度上给出的公式:
看一眼就好,看不懂也没关系!
补充一点:采样频率足够高时,可以只考虑PI项,不考虑D项;
