自己动手实现深度学习框架-7 RNN层--GRU, LSTM
目标
这个阶段会给cute-dl添加循环层,使之能够支持RNN--循环神经网络. 具体目标包括:
- 添加激活函数sigmoid, tanh.
- 添加GRU(Gate Recurrent Unit)实现.
- 添加LSTM(Long Short-term Memory)实现.
- 使用基于GRU和LSTM的RNN模型拟合一个正余弦叠加函数.
RNN原理
原始的RNN
RNN模型用来捕捉序列数据的特征. 给定一个长度为T的输入系列\(X=(x_1, x_2, .., X_T)\), RNN层输出一个长度为T的序列\(H=(h_1, h_2, ..., H_T)\), 对于任意时间步t, 可以表示为:
函数δ是sigmoid函数:
\(H_t\)包含了前面第1到t-1步的所有信息。 和CNN层类似, CNN层在空间上共享参数, RNN层在时间步上共享参数\(W_x, W_h, b\).
RNN层中隐藏层的数量为T-2, 如果T较大(超过10), 反向传播是很容易出现梯度爆炸. GRU和LSTM就是为了解决这个问题而诞生, 这两种模型,可以让RNN能够支持长度超过1000的输入序列。
GRU
GRU使用了不同功能的门控单元, 分别捕捉序列上不同时间跨度的的依赖关系。每个门控单元都会都有独立的参数, 这些参数在时间步上共享。
GRU的门控单元有:
\(R_t = δ(X_tW^r_x + H_{t-1}W^r_h + b^r)\), 重置门用于捕捉短期依赖关系.
\(U_t = δ(X_tW^u_x + H_{t-1}W^u_h + b^u)\), 更新门用于捕捉长期依赖关系
\(\bar{H}_t = tanh(X_t\bar{W}_x + (R_t * H_{t-1})\bar{W}_h + \bar{b})\)
除此之外, 还有一个输出单元:
\(H_t = U_t * H_{t-1} + (1-U_t)*\bar{H}_t\)
LSTM
LSTM的设计思路和GRU类似, 同样使用了多个门控单元:
\(I_t = δ(X_tW^i_x + H_{t-1}W^i_h + b^i)\), 输入门,过滤记忆门的输出.
\(F_t = δ(X_tW^f_x + H_{t-1}W^f_h + b^f)\), 遗忘门, 过滤前面时间步的记忆.
\(O_t = δ(X_tW^o_x + H_{t-1}W^o_h + b^o)\), 输出门, 过滤当前时间步的记忆.
\(M_t = tanh(X_tW^m_x + H_{t-1}W^m_h + b^m)\), 记忆门.
它还有自己独有的记忆单元和输出单元:
\(\bar{M}_t = F_t * \bar{M}_{t-1} + I_t * M_t\)
\(H_t = O_t * tanh(\bar{M}_t)\)
RNN实现
设计要求:
- RNN层中的隐藏层的数量是基于序列长度的,输入序列有多长, RNN层应生成对应数量的隐藏层。
- RNN层在时间步上共享参数, 从前面的描述可以看出, 只有门控单元有参数,因此门控单元应独立实现。
- 任意一个时间步上的层都依赖上一个时间步的输出,在正向传播和反向传播过程中都需要上一个时间步的输出, 每个门控单元都使用栈保存上一个时间步的输出.
- 默认情况下RNN层输出所有时间步的输出。但有时只需要最后一个时间步的输出, 这种情况下使用过滤层, 只向下一层传播最后一个时间步的输出。
- 使用门控单元实现GRU和LSTM
RNN基础类的实现
RNN类
文件: cutedl/rnn_layers.py, 类名: RNN
这个类是RNN层基类, 它主要功能是控制向前传播和向后传播的主流程.
初始化参数:
'''
out_units 输出单元数
in_units 输入单元数
stateful 保留当前批次的最后一个时间步的状态作为下一个批次的输入状态, 默认False不保留
RNN 的输入形状是(m, t, in_units)
m: batch_size
t: 输入系列的长度
in_units: 输入单元数页是输入向量的维数
输出形状是(m, t, out_units)
'''
def __init__(self, out_units, in_units=None, stateful=False, activation='linear'):
向前传播
def forward(self, in_batch, training):
m, T, n = in_batch.shape
out_units = self.__out_units
#所有时间步的输出
hstatus = np.zeros((m, T, out_units))
#上一步的输出
pre_hs = self.__pre_hs
if pre_hs is None:
pre_hs = np.zeros((m, out_units))
#隐藏层循环过程, 沿时间步执行
for t in range(T):
hstatus[:, t, :] = self.hiden_forward(in_batch[:,t,:], pre_hs, training)
pre_hs = hstatus[:, t, :]
self.__pre_hs = pre_hs
#pdb.set_trace()
if not self.stateful:
self.__pre_hs = None
return hstatus
反向传播
def backward(self, gradient):
m, T, n = gradient.shape
in_units = self.__in_units
grad_x = np.zeros((m, T, in_units))
#pdb.set_trace()
#从最后一个梯度开始反向执行.
for t in range(T-1, -1, -1):
grad_x[:,t,:], grad_hs = self.hiden_backward(gradient[:,t,:])
#pdb.set_trace()
if t - 1 >= 0:
gradient[:,t-1,:] = gradient[:,t-1,:] + grad_hs
#pdb.set_trace()
return grad_x
sigmoid和tanh激活函数
sigmoid及其导数
tanh及其导数
门控单元实现
文件: cutedl/rnn_layers.py, 类名: GateUint
门控单元是RNN层基础的参数单元. 和Dense层类似,它是Layer的子类,负责学习和使用参数。但在学习和使用参数的方式上有很大的不同:
- Dense有两个参数矩阵, GateUnit有3个参数矩阵.
- Dense在一次反向传播过程中只使用当前的梯度学习参数,而GateUnit会累积每个时间步的梯度。
下面我们会主要看一下GateUnit特别之处的代码.
在__ init__方法中定义参数和栈:
#3个参数
self.__W = None #当前时间步in_batch权重参数
self.__Wh = None #上一步输出的权重参数
self.__b = None #偏置量参数
#输入栈
self.__hs = [] #上一步输出
self.__in_batchs = [] #当前时间步的in_batch
正向传播:
def forward(self, in_batch, hs, training):
W = self.__W.value
b = self.__b.value
Wh = self.__Wh.value
out = in_batch @ W + hs @ Wh + b
if training:
#向前传播训练时把上一个时间步的输出和当前时间步的in_batch压栈
self.__hs.append(hs)
self.__in_batchs.append(in_batch)
#确保反向传播开始时参数的梯度为空
self.__W.gradient = None
self.__Wh.gradient = None
self.__b.gradient = None
return self.activation(out)
反向传播:
def backward(self, gradient):
grad = self.activation.grad(gradient)
W = self.__W.value
Wh = self.__Wh.value
pre_hs = self.__hs.pop()
in_batch = self.__in_batchs.pop()
grad_in_batch = grad @ W.T
grad_W = in_batch.T @ grad
grad_hs = grad @ Wh.T
grad_Wh = pre_hs.T @ grad
grad_b = grad.sum(axis=0)
#反向传播计算
if self.__W.gradient is None:
#当前批次第一次
self.__W.gradient = grad_W
else:
#累积当前批次的所有梯度
self.__W.gradient = self.__W.gradient + grad_W
if self.__Wh.gradient is None:
self.__Wh.gradient = grad_Wh
else:
self.__Wh.gradient = self.__Wh.gradient + grad_Wh
if self.__b.gradient is None:
self.__b.gradient = grad_b
else:
self.__b.gradient = self.__b.gradient + grad_b
return grad_in_batch, grad_hs
GRU实现
文件: cutedl/rnn_layers.py, 类名: GRU
隐藏单初始化:
def set_parent(self, parent):
super().set_parent(parent)
out_units = self.out_units
in_units = self.in_units
#pdb.set_trace()
#重置门
self.__g_reset = GateUnit(out_units, in_units)
#更新门
self.__g_update = GateUnit(out_units, in_units)
#候选输出门
self.__g_cddout = GateUnit(out_units, in_units, activation='tanh')
self.__g_reset.set_parent(self)
self.__g_update.set_parent(self)
self.__g_cddout.set_parent(self)
#重置门乘法单元
self.__u_gr = MultiplyUnit()
#输出单元
self.__u_out = GRUOutUnit()
向前传播:
def hiden_forward(self, in_batch, pre_hs, training):
gr = self.__g_reset.forward(in_batch, pre_hs, training)
gu = self.__g_update.forward(in_batch, pre_hs, training)
ugr = self.__u_gr.forward(gr, pre_hs, training)
cddo = self.__g_cddout.forward(in_batch, ugr, training)
hs = self.__u_out.forward(gu, pre_hs, cddo, training)
return hs
反向传播:
def hiden_backward(self, gradient):
grad_gu, grad_pre_hs, grad_cddo = self.__u_out.backward(gradient)
#pdb.set_trace()
grad_in_batch, grad_ugr = self.__g_cddout.backward(grad_cddo)
#计算梯度的过程中需要累积上一层输出的梯度
grad_gr, g_pre_hs = self.__u_gr.backward(grad_ugr)
grad_pre_hs = grad_pre_hs + g_pre_hs
g_in_batch, g_pre_hs = self.__g_update.backward(grad_gu)
grad_in_batch = grad_in_batch + g_in_batch
grad_pre_hs = grad_pre_hs + g_pre_hs
g_in_batch, g_pre_hs = self.__g_reset.backward(grad_gr)
grad_in_batch = grad_in_batch + g_in_batch
grad_pre_hs = grad_pre_hs + g_pre_hs
#pdb.set_trace()
return grad_in_batch, grad_pre_hs
LSTM实现
文件: cutedl/rnn_layers.py, 类名: LSTM
隐藏单元初始化:
def set_parent(self, layer):
super().set_parent(layer)
in_units = self.in_units
out_units = self.out_units
#输入门
self.__g_in = GateUnit(out_units, in_units)
#遗忘门
self.__g_forget = GateUnit(out_units, in_units)
#输出门
self.__g_out = GateUnit(out_units, in_units)
#记忆门
self.__g_memory = GateUnit(out_units, in_units, activation='tanh')
self.__g_in.set_parent(self)
self.__g_forget.set_parent(self)
self.__g_out.set_parent(self)
self.__g_memory.set_parent(self)
#记忆单元
self.__memory_unit =LSTMMemoryUnit()
#输出单元
self.__out_unit = LSTMOutUnit()
向前传播:
def hiden_forward(self, in_batch, hs, training):
g_in = self.__g_in.forward(in_batch, hs, training)
#pdb.set_trace()
g_forget = self.__g_forget.forward(in_batch, hs, training)
g_out = self.__g_out.forward(in_batch, hs, training)
g_memory = self.__g_memory.forward(in_batch, hs, training)
memory = self.__memory_unit.forward(g_forget, g_in, g_memory, training)
cur_hs = self.__out_unit.forward(g_out, memory, training)
return cur_hs
反向传播:
def hiden_backward(self, gradient):
#pdb.set_trace()
grad_out, grad_memory = self.__out_unit.backward(gradient)
grad_forget, grad_in, grad_gm = self.__memory_unit.backward(grad_memory)
grad_in_batch, grad_hs = self.__g_memory.backward(grad_gm)
tmp1, tmp2 = self.__g_out.backward(grad_out)
grad_in_batch += tmp1
grad_hs += tmp2
tmp1, tmp2 = self.__g_forget.backward(grad_forget)
grad_in_batch += tmp1
grad_hs += tmp2
tmp1, tmp2 = self.__g_in.backward(grad_in)
grad_in_batch += tmp1
grad_hs += tmp2
return grad_in_batch, grad_hs
验证
接下来, 验证示例将会构建一个简单的RNN模型, 使用该模型拟合一个正余弦叠加函数:
#采样函数
def sample_function(x):
y = 3*np.sin(2 * x * np.pi) + np.cos(x * np.pi) + np.random.uniform(-0.05,0.05,len(x))
return y
训练数据集和测试数据集在这个函数的不同定义域区间内样. 训练数据集的采样区间为[1, 200.01), 测试数据集的采样区间为[200.02, 240.002). 模型任务是预测这个函数值的序列.
示例代码在examples/rnn/fit_function.py文件中.
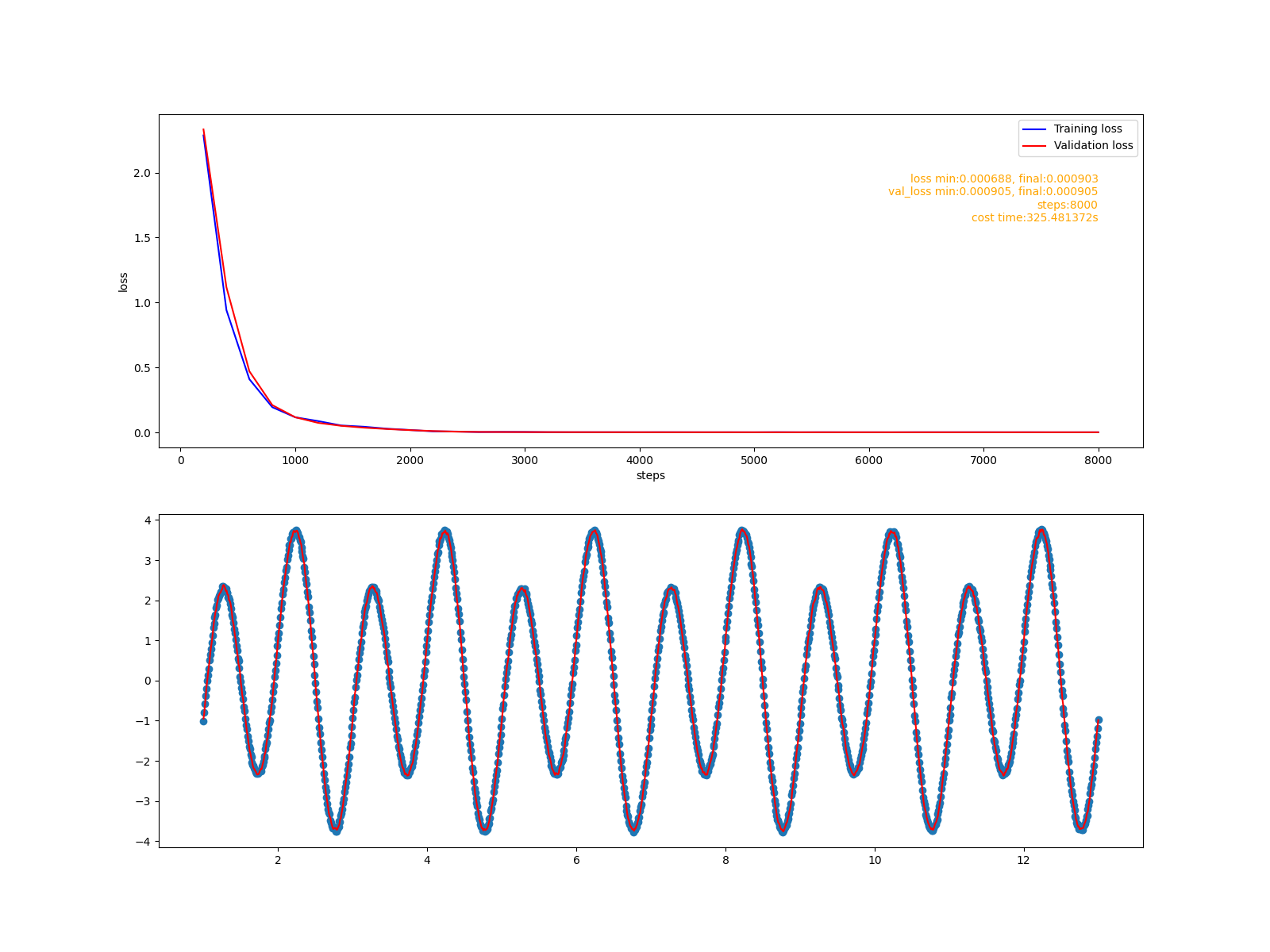
使用GRU构建的模型
def fit_gru():
model = Model([
rnn.GRU(32, 1),
nn.Filter(),
nn.Dense(32),
nn.Dense(1, activation='linear')
])
model.assemble()
fit('gru', model)
训练报告:
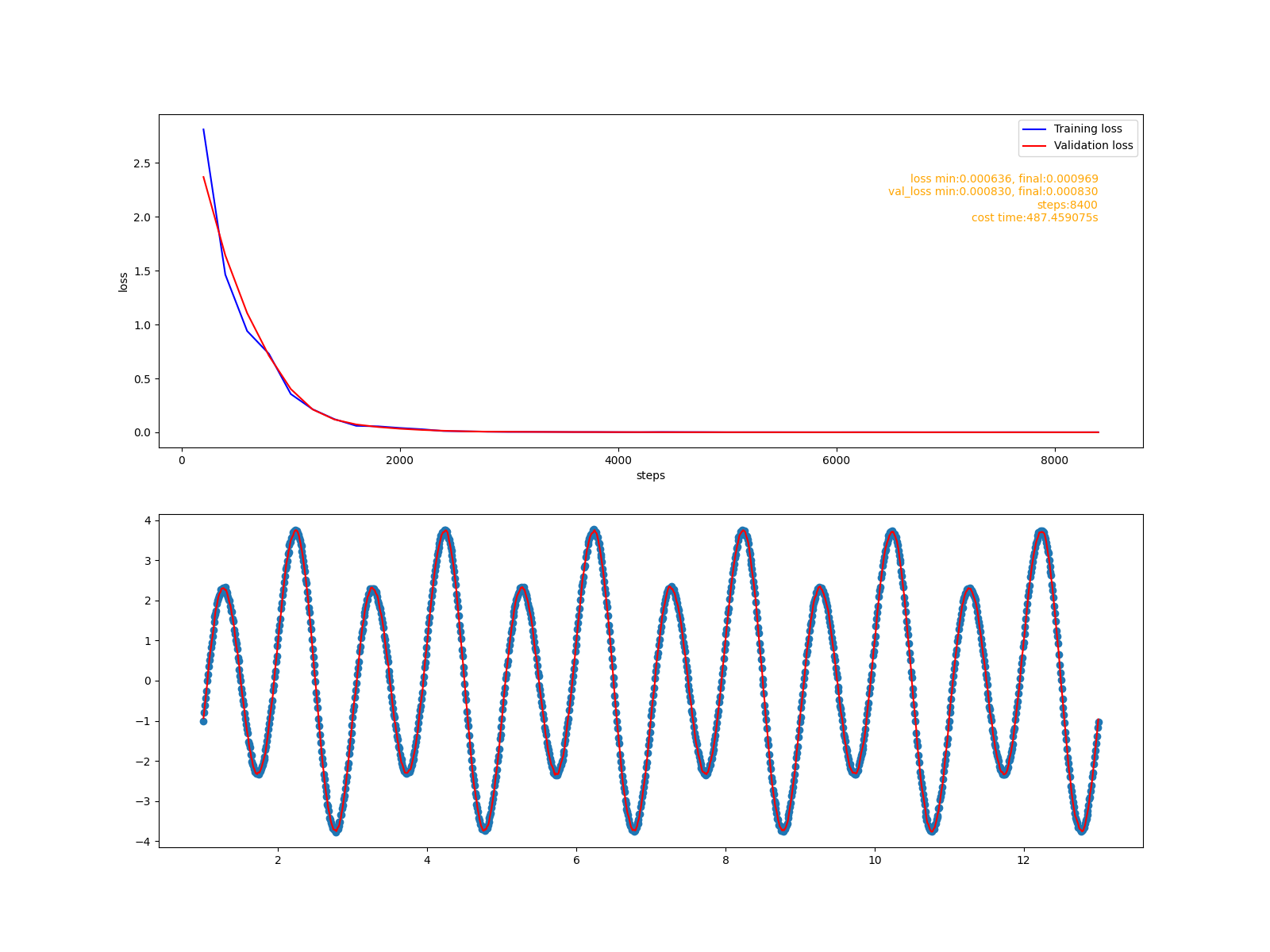
使用LSTM构建的模型
def fit_lstm():
model = Model([
rnn.LSTM(32, 1),
nn.Filter(),
nn.Dense(2),
nn.Dense(1, activation='linear')
])
model.assemble()
fit('lstm', model)
训练报告:
总结
这个阶段,框架新增了RNN的两个最常见的实现:GRU和LSTM, 相应地增加了它需要的激活函数. cute-dl已经具备了构建最基础RNN模型的能力。通过验证发现, GRU模型和LSTM模型在简单任务上都表现出了很好的性能。会添加嵌入层,使框架能够构建文本分类任务的模型,然后在imdb-review(电影评价)数据集上进行验证.


 浙公网安备 33010602011771号
浙公网安备 33010602011771号