go mux源码分析
互斥锁
前言
本次的代码是基于go version go1.13.15 darwin/amd64
什么是sync.Mutex
sync.Mutex是Go标准库中常用的一个排外锁。当一个goroutine获得了这个锁的拥有权后, 其它请求锁的goroutine就会阻塞在Lock方法的调用上,直到锁被释放。
var (
mu sync.Mutex
balance int
)
func main() {
Deposit(1)
fmt.Println(Balance())
}
func Deposit(amount int) {
mu.Lock()
balance = balance + amount
mu.Unlock()
}
func Balance() int {
mu.Lock()
b := balance
mu.Unlock()
return b
}
使用起来很简单,对需要锁定的资源,前面加Lock()锁定,完成的时候加Unlock()解锁就好了。
分析下源码
const (
// mutex is locked
// 是否加锁的标识
mutexLocked = 1 << iota
mutexWoken
mutexStarving
mutexWaiterShift = iota
// 公平锁
//
// 锁有两种模式:正常模式和饥饿模式。
// 在正常模式下,所有的等待锁的goroutine都会存在一个先进先出的队列中(轮流被唤醒)
// 但是一个被唤醒的goroutine并不是直接获得锁,而是仍然需要和那些新请求锁的(new arrivial)
// 的goroutine竞争,而这其实是不公平的,因为新请求锁的goroutine有一个优势——它们正在CPU上
// 运行,并且数量可能会很多。所以一个被唤醒的goroutine拿到锁的概率是很小的。在这种情况下,
// 这个被唤醒的goroutine会加入到队列的头部。如果一个等待的goroutine有超过1ms(写死在代码中)
// 都没获取到锁,那么就会把锁转变为饥饿模式。
//
// 在饥饿模式中,锁的所有权会直接从释放锁(unlock)的goroutine转交给队列头的goroutine,
// 新请求锁的goroutine就算锁是空闲状态也不会去获取锁,并且也不会尝试自旋。它们只是排到队列的尾部。
//
// 如果一个goroutine获取到了锁之后,它会判断以下两种情况:
// 1. 它是队列中最后一个goroutine;
// 2. 它拿到锁所花的时间小于1ms;
// 以上只要有一个成立,它就会把锁转变回正常模式。
// 正常模式会有比较好的性能,因为即使有很多阻塞的等待锁的goroutine,
// 一个goroutine也可以尝试请求多次锁。
// 饥饿模式对于防止尾部延迟来说非常的重要。
starvationThresholdNs = 1e6
)
// A Mutex is a mutual exclusion lock.
// The zero value for a Mutex is an unlocked mutex.
//
// A Mutex must not be copied after first use.
type Mutex struct {
// mutex锁当前的状态
state int32
// 信号量,用于唤醒goroutine
sema uint32
}
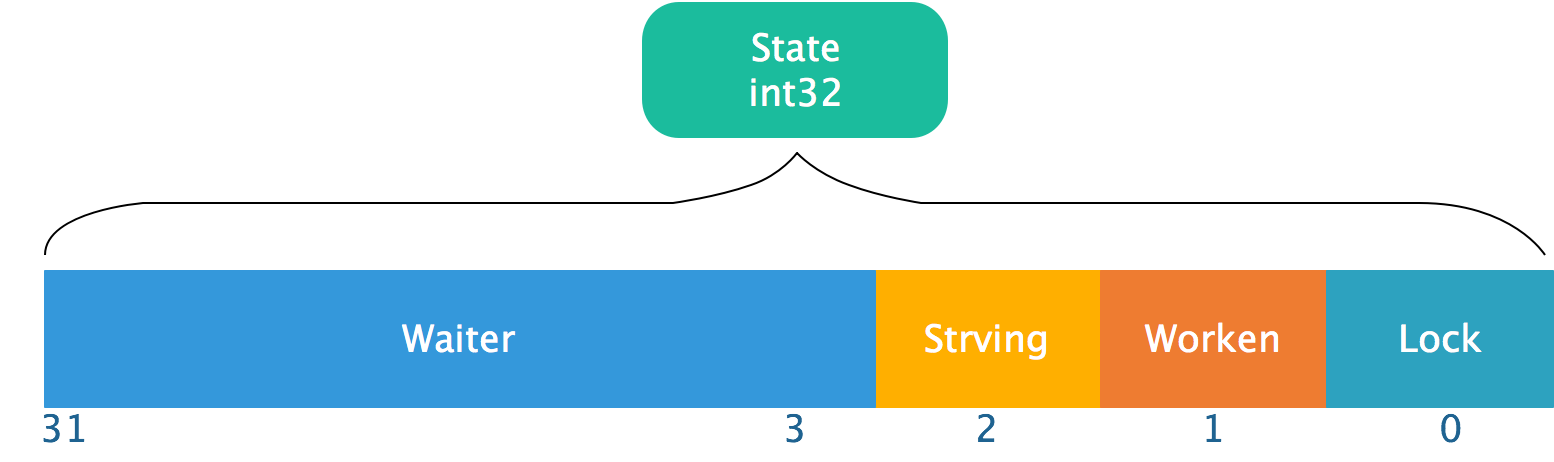
重点开看下state的几种状态:
大神写代码的思路就是惊奇,这里state又运用到了位移的操作
-
mutexLocked 对应右边低位第一个bit 1 代表锁被占用 0代表锁空闲
-
mutexWoken 对应右边低位第二个bit 1 表示已唤醒 0表示未唤醒
-
mutexStarving 对应右边低位第三个bit 1 代表锁处于饥饿模式 0代表锁处于正常模式
-
mutexWaiterShift 值为3,根据
mutex.state >> mutexWaiterShift得到当前阻塞的goroutine数目,最多可以阻塞2^29个goroutine。 -
starvationThresholdNs 值为1e6纳秒,也就是1毫秒,当等待队列中队首g
oroutine等待时间超过starvationThresholdNs也就是1毫秒,mutex进入饥饿模式。
Lock
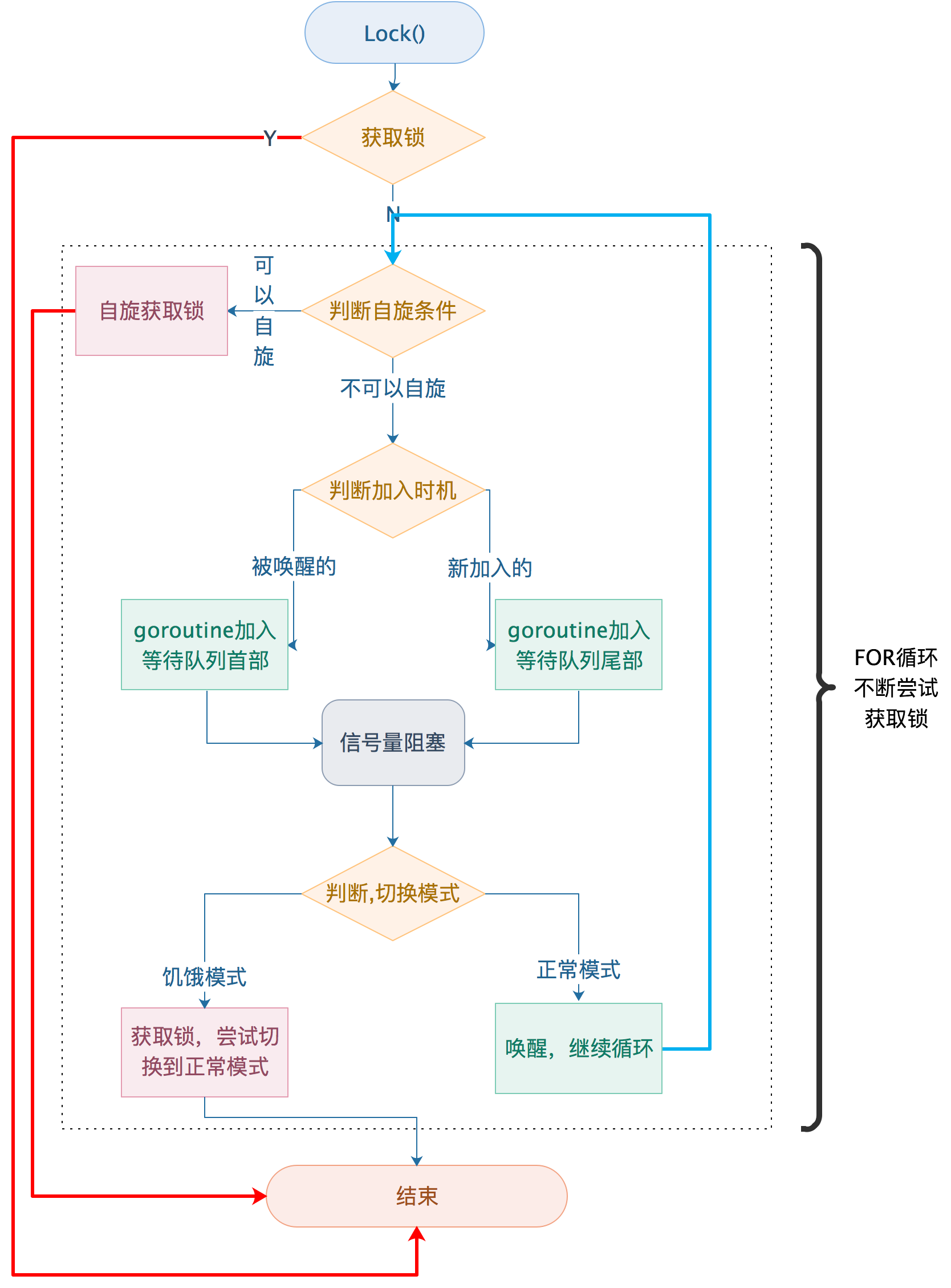
加锁基本上就这三种情况:
1、可直接获取锁,直接加锁,返回;
2、有冲突 首先自旋,如果其他goroutine在这段时间内释放了该锁,直接获得该锁;如果没有就走到下面3;
3、有冲突,且已经过了自旋阶段,通过信号量进行阻塞;
-
1、刚被唤醒的 加入到等待队列首部;
-
2、新加入的 加入到等待队列的尾部。
4、有冲突,根据不同的模式做处理;
-
1、饥饿模式 获取锁
-
2、正常模式 唤醒,继续循环,回到2
// Lock locks m.
// 如果锁正在使用中,新的goroutine请求,将被阻塞,直到锁被释放
func (m *Mutex) Lock() {
// 原子的(cas)来判断是否加锁
// 如果可以获取锁,直接加锁,返回
if atomic.CompareAndSwapInt32(&m.state, 0, mutexLocked) {
if race.Enabled {
race.Acquire(unsafe.Pointer(m))
}
return
}
// 这把锁,已经被别的goroutine持有
m.lockSlow()
}
func (m *Mutex) lockSlow() {
var waitStartTime int64
// 是否处于饥饿模式
starving := false
// 用来存当前goroutine是否已唤醒
awoke := false
// 用来存当前goroutine的循环次数
iter := 0
// 记录下当前的状态
old := m.state
for {
// 第一个条件是state已被锁,但是不是饥饿状态。如果时饥饿状态,自旋时没有用的,锁的拥有权直接交给了等待队列的第一个。
// 第二个条件是还可以自旋,多核、压力不大并且在一定次数内可以自旋, 具体的条件可以参考`sync_runtime_canSpin`的实现。
// 如果满足这两个条件,不断自旋来等待锁被释放、或者进入饥饿状态、或者不能再自旋。
if old&(mutexLocked|mutexStarving) == mutexLocked && runtime_canSpin(iter) {
// 自旋的过程中如果发现state还没有设置woken标识,则设置它的woken标识, 并标记自己为被唤醒。
if !awoke && old&mutexWoken == 0 && old>>mutexWaiterShift != 0 &&
atomic.CompareAndSwapInt32(&m.state, old, old|mutexWoken) {
awoke = true
}
// 主动自旋
runtime_doSpin()
// 循环次数加一
iter++
old = m.state
continue
}
// 到了这一步, state的状态可能是:
// 1. 锁还没有被释放,锁处于正常状态
// 2. 锁还没有被释放, 锁处于饥饿状态
// 3. 锁已经被释放, 锁处于正常状态
// 4. 锁已经被释放, 锁处于饥饿状态
// new 复制 state的当前状态, 用来设置新的状态
// old 是锁当前的状态
new := old
// 如果old state状态不是饥饿状态, new state 设置锁, 尝试通过CAS获取锁,
// 如果old state状态是饥饿状态, 则不设置new state的锁,因为饥饿状态下锁直接转给等待队列的第一个.
if old&mutexStarving == 0 {
// 伪代码:newState = locked
new |= mutexLocked
}
// 如果锁是被获取状态,或者饥饿状态
// 就把期望状态中的等待队列的等待者数量+1(实际上是new + 8)
if old&(mutexLocked|mutexStarving) != 0 {
new += 1 << mutexWaiterShift
}
// 如果当前goroutine已经处于饥饿状态, 并且old state的已被加锁,
// 将new state的状态标记为饥饿状态, 将锁转变为饥饿状态.
if starving && old&mutexLocked != 0 {
// 设置为饥饿状态
new |= mutexStarving
}
if awoke {
// goroutine已从睡眠中唤醒,
// 因此,无论哪种情况,我们都需reset
if new&mutexWoken == 0 {
throw("sync: inconsistent mutex state")
}
// 设置new设置为非唤醒状态
// &^的意思是and not
new &^= mutexWoken
}
// 原子(cas)更新state的状态
// 注意new的锁标记不一定是true, 也可能只是标记一下锁的state是饥饿状态.
if atomic.CompareAndSwapInt32(&m.state, old, new) {
// 如果说old状态不是饥饿状态也不是被获取状态
// 那么代表当前goroutine已经通过CAS成功获取了锁
if old&(mutexLocked|mutexStarving) == 0 {
// 直接break
break // locked the mutex with CAS
}
// 如果我们之前已经在等了,那就排在队伍前面。
queueLifo := waitStartTime != 0
// 如果说之前没有等待过,就初始化设置现在的等待时间
if waitStartTime == 0 {
waitStartTime = runtime_nanotime()
}
// queueLifo为true,也就是之前已经在等了
// runtime_SemacquireMutex中的lifo为true,则将等待服务程序放在等待队列的开头。
// 会被阻塞
runtime_SemacquireMutex(&m.sema, queueLifo, 1)
// 阻塞被唤醒
// 如果当前goroutine已经是饥饿状态了
// 或者当前goroutine已经等待了1ms(在上面定义常量)以上
// 就把当前goroutine的状态设置为饥饿
starving = starving || runtime_nanotime()-waitStartTime > starvationThresholdNs
old = m.state
// 如果是饥饿模式
if old&mutexStarving != 0 {
// 如果goroutine被唤醒,互斥锁处于饥饿模式
// 锁的所有权转移给当前goroutine,但是锁处于不一致的状态中:mutexLocked没有设置
// 并且我们将仍然被认为是waiter。这个状态需要被修复。
if old&(mutexLocked|mutexWoken) != 0 || old>>mutexWaiterShift == 0 {
throw("sync: inconsistent mutex state")
}
// 当前goroutine获取锁,waiter数量-1
delta := int32(mutexLocked - 1<<mutexWaiterShift)
// 如果当前goroutine非饥饿状态,或者说当前goroutine是队列中最后一个goroutine
// 那么就退出饥饿模式,把状态设置为正常
if !starving || old>>mutexWaiterShift == 1 {
// 退出饥饿模式
// 在这里这么做至关重要,还要考虑等待时间。
// 饥饿模式是非常低效率的,一旦两个goroutine将互斥锁切换为饥饿模式,它们便可以无限锁。
delta -= mutexStarving
}
// 原子的加上更新的值
atomic.AddInt32(&m.state, delta)
break
}
// 不是饥饿模式,就把当前的goroutine设为被唤醒
awoke = true
// 重置循环的次数
iter = 0
} else {
// 如果CAS不成功,也就是说没能成功获得锁,锁被别的goroutine获得了或者锁一直没被释放
// 那么就更新状态,重新开始循环尝试拿锁
old = m.state
}
}
if race.Enabled {
race.Acquire(unsafe.Pointer(m))
}
}
const (
active_spin = 4
)
// src/runtime/proc.go
// Active spinning for sync.Mutex.
// go:linkname sync_runtime_canSpin sync.runtime_canSpin
// go:nosplit
func sync_runtime_canSpin(i int) bool {
// sync.Mutex是会被多个goroutine竞争的,所以自旋的次数需要控制
// active_spin的值为4
// 满足下面的添加才会发生自旋
// 1、自旋的次数小于active_spin也就是4
// 2、如果在单核的cpu是不能自旋的
// 3、 GOMAXPROCS> 1,并且至少有一个其他正在运行的P,并且本地runq为空。
// 4、当前P没有其它等待运行的G
if i >= active_spin || ncpu <= 1 || gomaxprocs <= int32(sched.npidle+sched.nmspinning)+1 {
return false
}
if p := getg().m.p.ptr(); !runqempty(p) {
return false
}
return true
}
// src/runtime/proc.go
// go:linkname sync_runtime_doSpin sync.runtime_doSpin
// go:nosplit
// procyield的实现是用汇编实现的
func sync_runtime_doSpin() {
procyield(active_spin_cnt)
}
// src/runtime/asm_amd64.s
TEXT runtime·procyield(SB),NOSPLIT,$0-0
MOVL cycles+0(FP), AX
again:
// 让加锁失败时cpu睡眠30个(about)clock,从而使得读操作的频率低很多。流水线重排的代价也会小很多
PAUSE
SUBL $1, AX
JNZ again
RET
梳理下流程
1、原子的(cas)来判断是否加锁,如果之前锁没有被使用,当前goroutine获取锁,结束本次Lock操作;
2、如果已经被别的goroutine持有了,启动一个for循环去抢占锁;
会存在两种状态的切换 饥饿状态和正常状态
如果一个等待的goroutine有超过1ms(写死在代码中)都没获取到锁,那么就会把锁转变为饥饿模式
如果一个goroutine获取到了锁之后,它会判断以下两种情况:
-
1、它是队列中最后一个goroutine;
-
2、它拿到锁所花的时间小于1ms;
以上只要有一个成立,它就会把锁转变回正常模式。
3、如果锁已经被锁了,并且不是饥饿状态,并且满足自旋的条件,当前goroutine会不断的进行自旋,等待锁被释放;
4、不满足锁自旋的条件,然后结束自旋,这是当前锁的状态可能有下面几种情况:
-
1、锁还没有被释放,锁处于正常状态
-
2、锁还没有被释放, 锁处于饥饿状态
-
3、锁已经被释放, 锁处于正常状态
-
4、锁已经被释放, 锁处于饥饿状态
5、如果old.state不是饥饿状态,新的goroutine尝试去获锁,如果是饥饿状态,就直接将锁直接转给等待队列的第一个;
6、如果锁是被获取或饥饿状态,等待者的数量加一;
7、当本goroutine被唤醒了,要么获得了锁,要么进入休眠;
8、如果old state的状态是未被锁状态,并且锁不处于饥饿状态,那么当前goroutine已经获取了锁的拥有权,结束Lock;
9、判断一下当前goroutine是新来的还是刚被唤醒的,新来的加入到等待队列的尾部,刚被唤醒的加入到等待队列的头部,然后通过信号量阻塞,直到当前goroutine被唤醒;
10、判断如果当前state是否是饥饿状态,不是的唤醒本次goroutine,继续循环,是饥饿状态继续往下面走;
11、饥饿状态,当前goroutine来设置锁,等待者减一,如果当前goroutine是队列中最后一个goroutine设置饥饿状态为正常,拿到锁结束Lock。
位运算
上面有很多关于&和|的运算和判断,下面来具体的分析下
& 位运算 AND
| 位运算 OR
^ 位运算 XOR
&^ 位清空(AND NOT)
<< 左移
>> 右移
&
参与运算的两数各对应的二进位相与,两个二进制位都为1时,结果才为1
0101
AND 0011
= 0001
|
参与运算的两数各对应的二进位相或,两个二进制位都为1时,结果才为0
0101(十进制5)
OR 0011(十进制3)
= 0111(十进制7)
^
按位异或运算,对等长二进制模式或二进制数的每一位执行逻辑异或操作。操作的结果是如果某位不同则该位为1,否则该位为0。
0101
XOR 0011
= 0110
&^
将运算符左边数据相异的位保留,相同位清零
0001 0100
&^ 0000 1111
= 0001 0000
<<
各二进位全部左移若干位,高位丢弃,低位补0
0001(十进制1)
<< 3(左移3位)
= 1000(十进制8)
>>
各二进位全部右移若干位,对无符号数,高位补0,有符号数,各编译器处理方法不一样,有的补符号位(算术右移),有的补0
1010(十进制10)
>> 2(右移2位)
= 0010(十进制2)
Unlock
// Unlock unlocks m.
// 如果没有lock就去unlocak是会报错的
//
//一个锁定的互斥锁与一个特定的goroutine没有关联。
// 它允许一个goroutine锁定一个互斥锁然后
// 安排另一个goroutine解锁它。
func (m *Mutex) Unlock() {
if race.Enabled {
_ = m.state
race.Release(unsafe.Pointer(m))
}
// 修改state的状态
new := atomic.AddInt32(&m.state, -mutexLocked)
if new != 0 {
// 不为0,说明没有成功解锁
m.unlockSlow(new)
}
}
func (m *Mutex) unlockSlow(new int32) {
if (new+mutexLocked)&mutexLocked == 0 {
throw("sync: unlock of unlocked mutex")
}
if new&mutexStarving == 0 {
old := new
for {
// 如果说锁没有等待拿锁的goroutine
// 或者锁被获取了(在循环的过程中被其它goroutine获取了)
// 或者锁是被唤醒状态(表示有goroutine被唤醒,不需要再去尝试唤醒其它goroutine)
// 或者锁是饥饿模式(会直接转交给队列头的goroutine)
// 那么就直接返回,啥都不用做了
// 也就是没有等待的goroutine, 或者锁不处于空闲的状态,直接返回.
if old>>mutexWaiterShift == 0 || old&(mutexLocked|mutexWoken|mutexStarving) != 0 {
return
}
// 走到这一步的时候,说明锁目前还是空闲状态,并且没有goroutine被唤醒且队列中有goroutine等待拿锁
// 将等待的goroutine数减一,并设置woken标识
new = (old - 1<<mutexWaiterShift) | mutexWoken
// 设置新的state, 这里通过信号量会唤醒一个阻塞的goroutine去获取锁.
if atomic.CompareAndSwapInt32(&m.state, old, new) {
runtime_Semrelease(&m.sema, false, 1)
return
}
old = m.state
}
} else {
// 饥饿模式下, 直接将锁的拥有权传给等待队列中的第一个.
// 注意此时state的mutexLocked还没有加锁,唤醒的goroutine会设置它。
// 在此期间,如果有新的goroutine来请求锁, 因为mutex处于饥饿状态, mutex还是被认为处于锁状态,
// 新来的goroutine不会把锁抢过去.
runtime_Semrelease(&m.sema, true, 1)
}
}
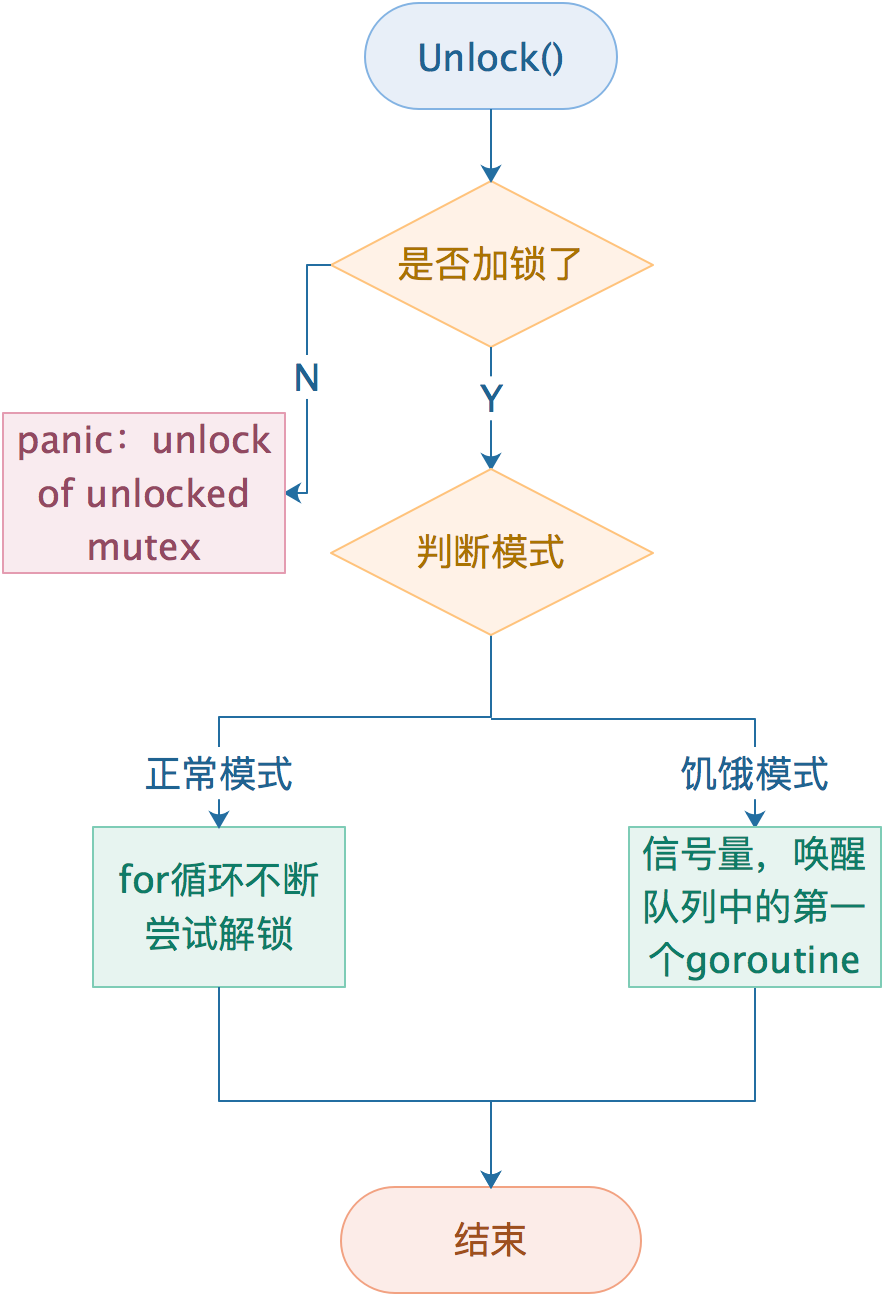
梳理下流程:
1、首先判断如果之前是锁的状态是未加锁,Unlock将会触发panic;
2、如果当前锁是正常模式,一个for循环,去不断尝试解锁;
3、饥饿模式下,通过信号量,唤醒在饥饿模式下面Lock操作下队列中第一个goroutine。
总结
1、加锁的过程会存在正常模式和互斥模式的转换;
2、饥饿模式就是保证锁的公平性,正常模式下的互斥锁能够提供更好地性能,饥饿模式的能避免 Goroutine 由于陷入等待无法获取锁而造成的高尾延时;
3、锁的状态的转换,也使用到了位运算;
4、一个已经锁定的互斥锁,允许其他协程进行解锁,不过只能被解锁一次;
参考
【sync.Mutex 源码分析】https://reading.hidevops.io/articles/sync/sync_mutex_source_code_analysis/
【一份详细注释的go Mutex源码】http://cbsheng.github.io/posts/一份详细注释的go-mutex源码/
【源码剖析 golang 中 sync.Mutex】https://www.purewhite.io/2019/03/28/golang-mutex-source/
【sync.mutex 源代码分析】https://colobu.com/2018/12/18/dive-into-sync-mutex/
【源码剖析 golang 中 sync.Mutex】https://www.purewhite.io/2019/03/28/golang-mutex-source/

