FDCAN输出数据(STM32H7)
STM32配置FDCAN
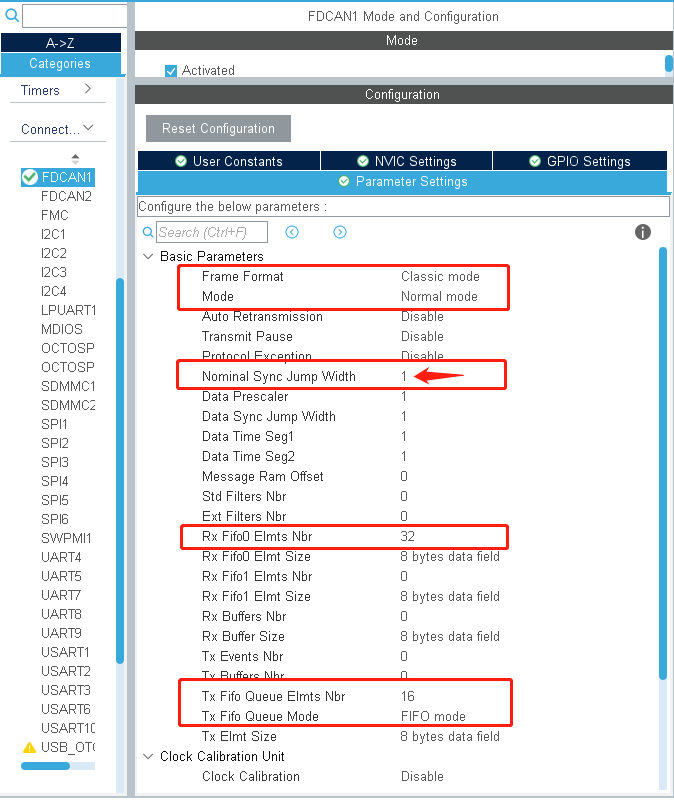
总线上有的设备可能不支持FDCAN,FDCAN配置为传统CAN。
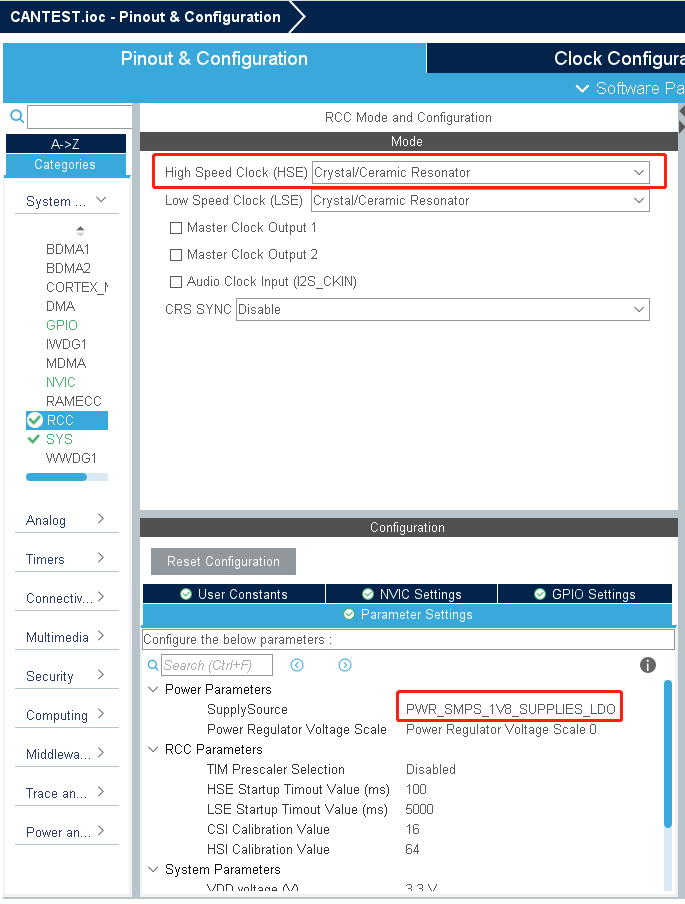
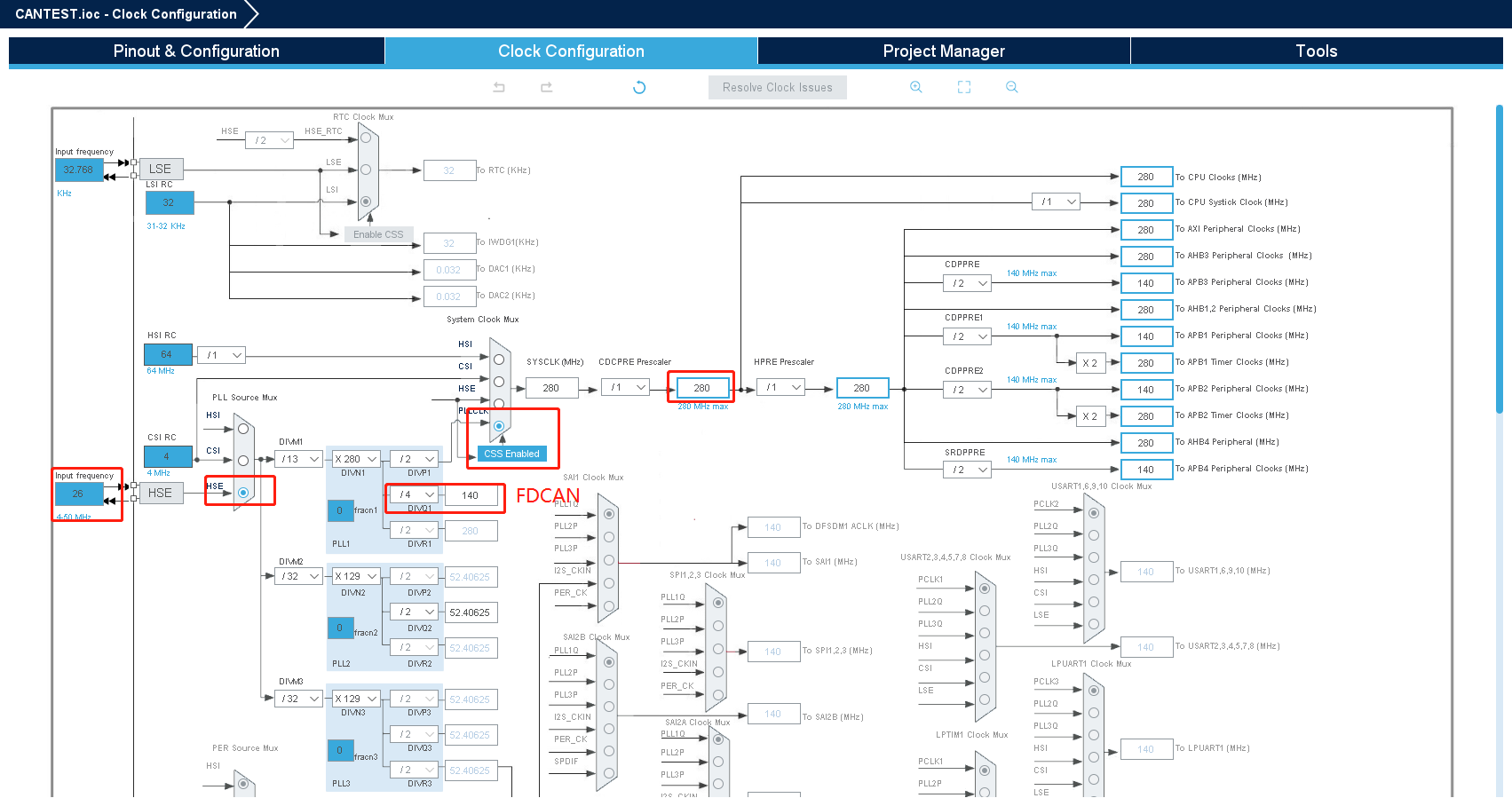
配置外部时钟
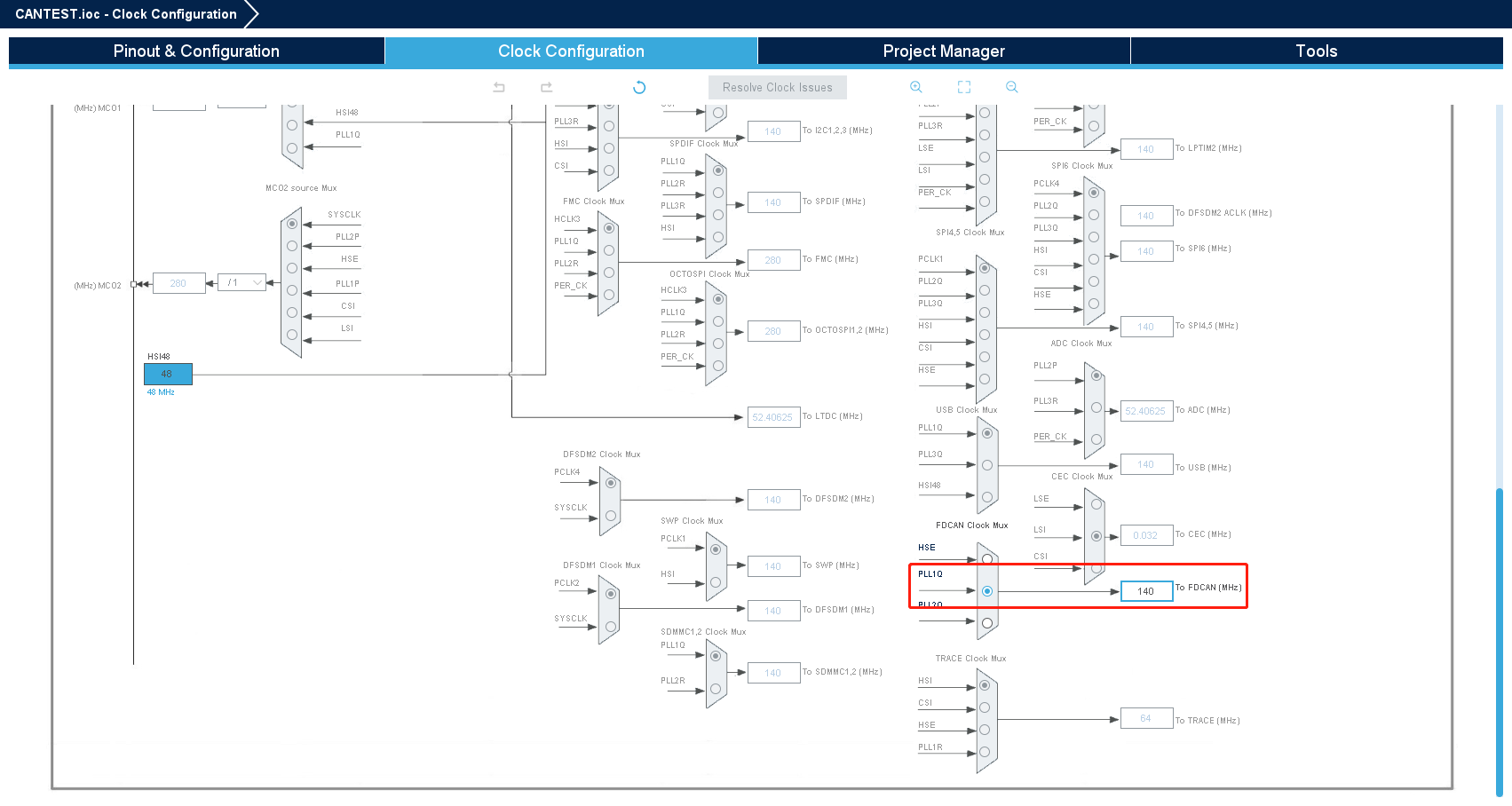
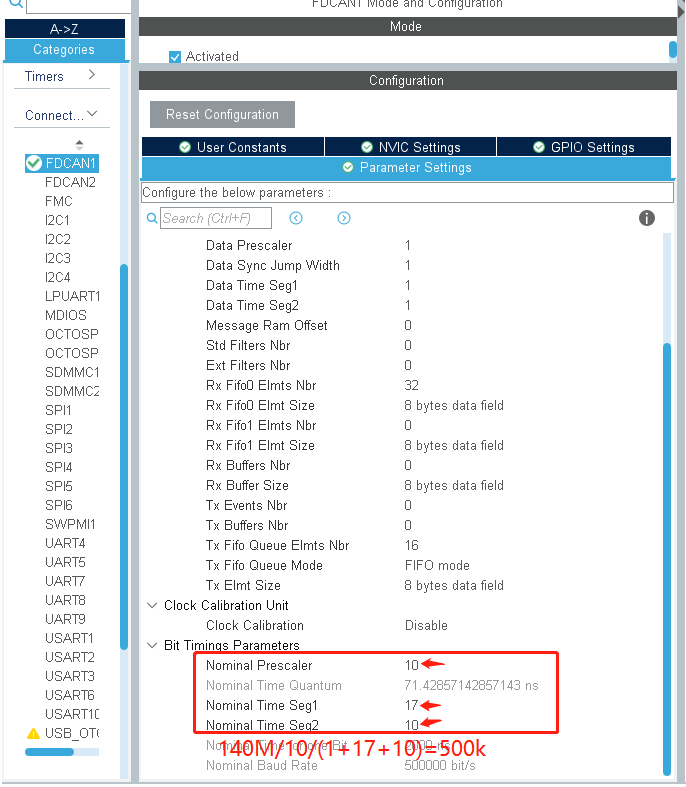
配置FDCAN1
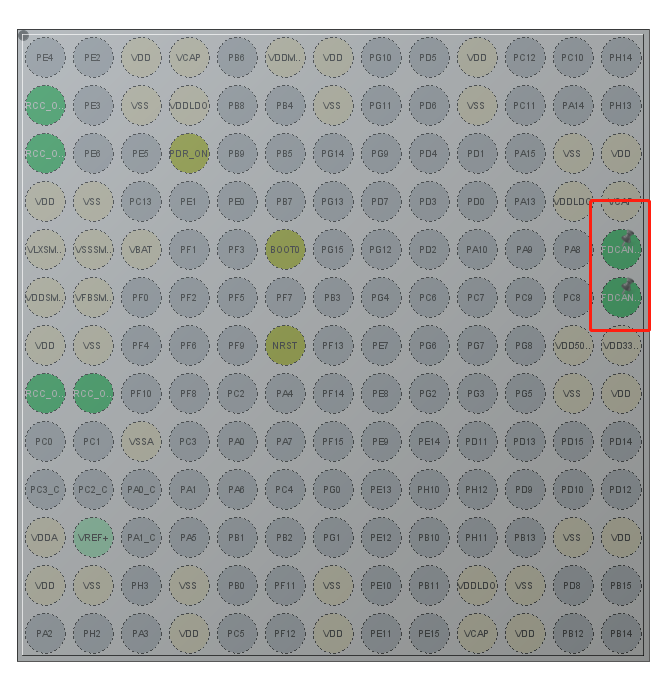
GPIO配置
定义变量
FDCAN_RxHeaderTypeDef RxHeader; FDCAN_TxHeaderTypeDef TxHeader; uint8_t RxData[8]; uint8_t TxData[64] = {0x24,0x47,0x4E,0x47,0x53,0x41,0x2C,0x41,0x2C,0x31,0x2C,0x2C,0x2C,0x2C,0x2C,0x2C,0x2C,0x2C,0x2C,0x2C,0x2C,0x2C,0x2C,0x39,0x39,0x2E,0x30,0x2C,0x39,0x39,0x2E,0x30,0x2C,0x39,0x39,0x2E,0x30,0x2A,0x31,0x45,0x0A}; uint8_t TxData1[8] = {0x03,0x41,0x0D,0x32,0x00,0x00,0x00,0x00};
配置CAN发送参数
void FDCAN1_Config(void) { FDCAN_FilterTypeDef sFilterConfig; sFilterConfig.IdType = FDCAN_STANDARD_ID; // 配置为过滤标准帧 sFilterConfig.FilterIndex = 0; // 过滤器的索引号 sFilterConfig.FilterType = FDCAN_FILTER_MASK; // 过滤方式为范围,即从FilterID1~FilterID2之间的值 sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO0; sFilterConfig.FilterID1 = 0x0000; sFilterConfig.FilterID2 = 0x07ff; // 标准帧为11位ID,即0x7ff,本例配置为接收所有帧 if(HAL_FDCAN_ConfigFilter(&hfdcan1, &sFilterConfig) != HAL_OK) { Error_Handler(); } if (HAL_FDCAN_ConfigGlobalFilter(&hfdcan1, FDCAN_REJECT, FDCAN_REJECT, FDCAN_FILTER_REMOTE, FDCAN_FILTER_REMOTE) != HAL_OK) { Error_Handler(); } // sFilterConfig.IdType = FDCAN_EXTENDED_ID; // 配置为过滤扩展帧 // sFilterConfig.FilterIndex = 0; // 过滤器的索引号 // sFilterConfig.FilterType = FDCAN_FILTER_RANGE_NO_EIDM; // 过滤方式为范围,即从FilterID1~FilterID2之间的值 // sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO1; // sFilterConfig.FilterID1 = 0x00000000; // sFilterConfig.FilterID2 = 0x01ffffff; // 扩展帧为29位ID,即0x1fffffff,本例配置为接收所有帧 // HAL_FDCAN_ConfigFilter(&hfdcan1, &sFilterConfig); HAL_FDCAN_ActivateNotification(&hfdcan1,FDCAN_IT_RX_FIFO0_NEW_MESSAGE,0); if (HAL_FDCAN_Start(&hfdcan1) != HAL_OK) { Error_Handler(); } }
CAN发送数据包
uint8_t can1_SendPacket(uint32_t id, uint8_t *_DataBuf, uint8_t _Len) { FDCAN_TxHeaderTypeDef TxHeader = {0}; /* 配置发送参数 */ TxHeader.Identifier = id; /* 设置发送帧消息的ID */ TxHeader.IdType = FDCAN_STANDARD_ID; /* 标准ID */ TxHeader.TxFrameType = FDCAN_DATA_FRAME; /* 数据帧 */ TxHeader.ErrorStateIndicator = FDCAN_ESI_ACTIVE; /* 设置错误状态指 */ TxHeader.BitRateSwitch = FDCAN_BRS_OFF; /* 关闭可变波特率 */ TxHeader.FDFormat = FDCAN_CLASSIC_CAN; /* FDCAN格式 */ TxHeader.TxEventFifoControl = FDCAN_NO_TX_EVENTS;/* 用于发送事件FIFO控制, 无发送事件*/ TxHeader.MessageMarker = 0; /* 用于复制到TX EVENT FIFO的消息Maker来识别消息状态,范围0-0xFF */ /* 添加数据到TX FIFO */ int i = 0; int len = 8U; for( ; _Len; ) { if(_Len>=8) { _Len -=8; } else { len = _Len; _Len = 0; } TxHeader.DataLength = len<<16; /* 发送数据长度 */ while((hfdcan1.Instance->TXFQS)&(1U<<21)); //发送缓冲满了就阻塞 if(HAL_FDCAN_AddMessageToTxFifoQ(&hfdcan1, &TxHeader, _DataBuf+i)) return 1; i +=len; } return 0; }
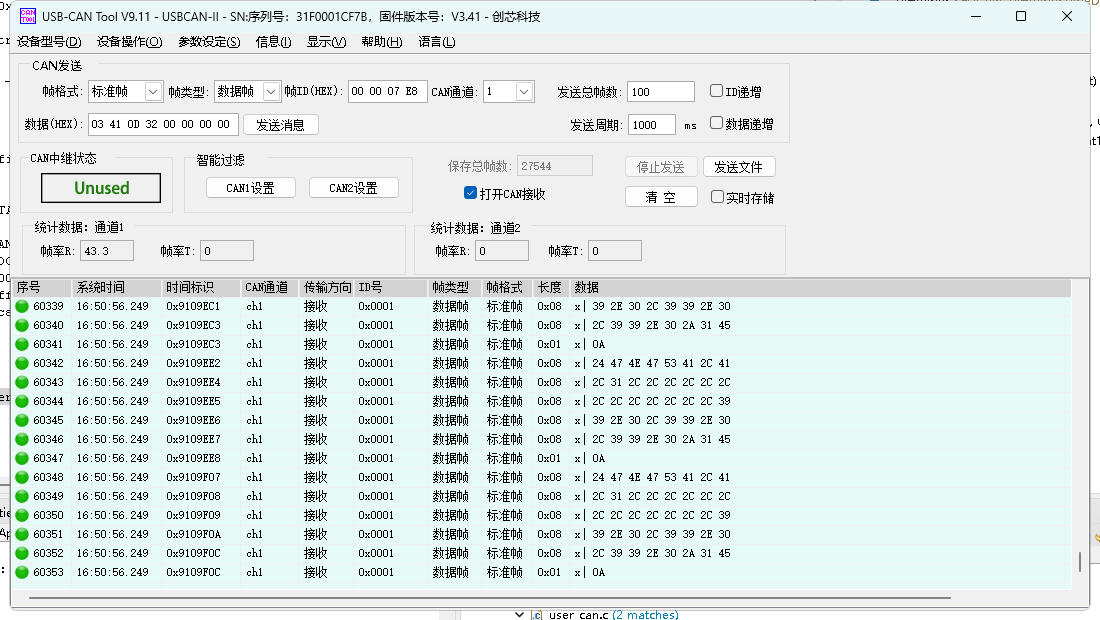
测试
int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MPU Configuration--------------------------------------------------------*/ MPU_Config(); /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_FDCAN1_Init(); /* USER CODE BEGIN 2 */ FDCAN1_Config(); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { can1_SendPacket(0x0001, TxData, 41); HAL_Delay(1000); /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号