

FPN详解
作者提出的多尺度的object detection算法:FPN(feature pyramid networks)。原来多数的object detection算法都只是采用顶层特征做预测,但我们知道底层的特征语义信息比较少,但是目标位置准确;高层的特征语义信息比较丰富,但是目标位置比较粗略。另外虽然也有些算法采用多尺度特征融合的方式,但是一般是采用融合后的特征做预测,而FPN不一样的地方在于预测是不同特征层独立进行的。
R-CNN系列在单个scale的feature map做检测,尽管conv已经对scale有些鲁棒了,但是还是不够。物体各种各样的scale还是是个难题,尤其是小物体,所以有很多论文在这上面做工作,最简单的做法就是类似于数据增强了,train时把图片放缩成不同尺度送入网络进行训练,但是图片变大很吃内存,一般只在测试时放缩图片,这样一来测试时需要测试好几遍实践就慢了。另一种是SSD的做法,在不同尺度的feature map上做检测,按理说它该在计算好的不同scale的feature map上做检测,但是它放弃了前面的low-level的feature map,而是从conv4_3开始用而且在后面加了一些conv,生成更多高层语义的feature map在上面检测(我猜想是因为这些low-level的feature map一是太大了很大的拖慢SSC最追求的速度,二是这些low-level的语义信息太差了,效果没太大提升)。所以FPN就想既利用conv net本身的这种已经计算过的不同scale的feature,又想让low-level的高分辨的feature具有很强的语义,所以自然的想法就是把high-level的地分辨的feature map融合过来。
一,FPN初探
1.1 图像金字塔
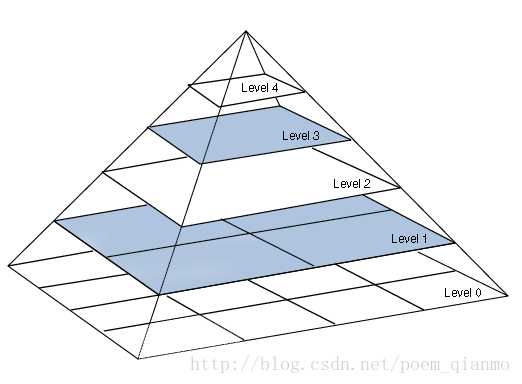
图1,图像金字塔
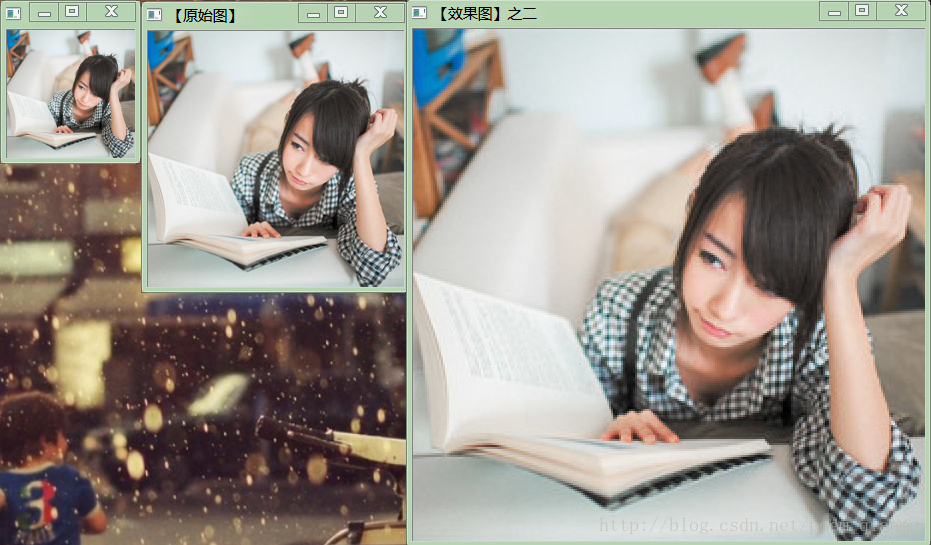
图2 高斯金字塔效果
如上图所示,这是一个图像金字塔,做CV的你肯定很熟悉,因为在很多的经典算法里面都有它的身影,比如SIFT、HOG等算法。我们常用的是高斯金字塔,所谓的高斯金字塔是通过高斯平滑和亚采样获得一些下采样图像,也就是说第K层高斯金字塔通过平滑、亚采样操作就可以获得K+1层高斯图像,高斯金字塔包含了一系列低通滤波器,其截止频率从上一层到下一层是以因子2逐渐增加,所以高斯金字塔可以跨越很大的频率范围。总之,我们输入一张图片,我们可以获得多张不同尺度的图像,我们将这些不同尺度的图像的4个顶点连接起来,就可以构造出一个类似真实金字塔的一个图像金字塔。通过这个操作,我们可以为2维图像增加一个尺度维度(或者说是深度),这样我们可以从中获得更多的有用信息。整个过程类似于人眼看一个目标由远及近的过程(近大远小原理)。如图2所示,我们可以看到一个图像金字塔,中间是原始图像,最上边是下采样后的图像,最下边是上采样后的图像。你可以将其对应到图1中的不同层中。
1.2 为什么需要构造特征金字塔
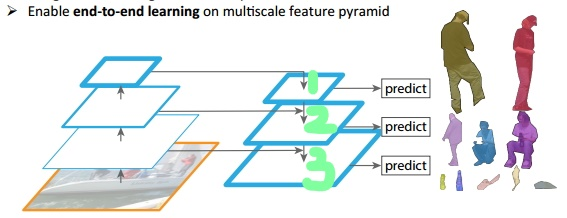
图3 特征金字塔
前面已经提到了高斯金字塔,由于它可以在一定程度上面提高算法的性能,因此很多经典的算法中都包含它。但是这些都是在传统的算法中使用,当然也可以将这种方法直应用在深度神经网络上面,但是由于它需要大量的运算和大量的内存。但是我们的特征金字塔可以在速度(cnn随着网络层数增加可直接得到特征金字塔)和准确率之间进行权衡,可以通过它获得更加鲁棒的语义信息,这是其中的一个原因。
如上图所示,我们可以看到我们的图像中存在不同尺寸的目标,而不同的目标具有不同的特征,利用浅层的特征就可以将简单的目标的区分开来;利用深层的特征可以将复杂的目标区分开来;这样我们就需要这样的一个特征金字塔来完成这件事。图中我们在第1层(请看绿色标注)输出较大目标的实例分割结果,在第2层输出次大目标的实例检测结果,在第3层输出较小目标的实例分割结果。检测也是一样,我们会在第1层输出简单的目标,第2层输出较复杂的目标,第3层输出复杂的目标。
1.3 为什么要提出FPN算法
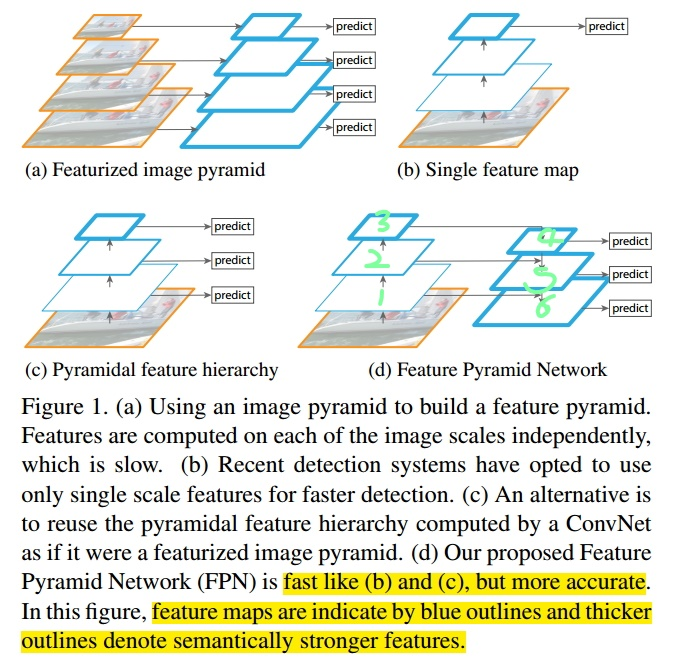
图4 不同方案的金字塔
识别不同大小的物体是计算机视觉中的一个基本挑战,我们常用的解决方案是构造多尺度金字塔。如上图a所示,这是一个特征图像金字塔,整个过程是先对原始图像构造图像金字塔,然后再图像金字塔的每一层提出不同的特征,然后进行相应的预测(BB的位置)。这种方法的缺点是计算量大,需要大量的内存;优点是可以获得较好的检测精度。它通常会称为整个算法的性能瓶颈,由于这些原因,当然很少使用这种算法。
如上图b所示,这是一种改进的思路,学者们发现我们可以利用卷积网络本身的特性,即对原始图像进行卷积和池化操作,通过这种操作我们可以获得不同尺寸的feature map,这样其实就类似于在图像的特征空间中构造金字塔。实验表明,浅层的网络更关注于细节信息,高层的网络更关注于语义信息,而高层的语义信息能够帮助我们准确的检测出目标,因此我们可以利用最后一个卷积层上的feature map来进行预测。这种方法的存在于大多数深度网络中,比如VGG、ResNet、Inception,它们都是利用深度网络的最后一层特征来进行分类。这种方法的优点是速度快、需要内存少。它的缺点是我们仅仅关注深层网络中最后一层的特征,却忽略了其它层的特征,但是细节信息可以在一定程度上提升检测的精度,因此有了图c所示的架构。
图c所示架构的设计思想就是同时利用低层特征和高层特征,分别在不同的层同时进行预测,这是因为我的一幅图像中可能具有多个不同大小的目标,区分不同的目标可能需要不同的特征,对于简单的目标我们仅仅需要浅层的特征就可以检测到它,对于复杂的目标我们就需要利用复杂的特征来检测它。整个过程就是首先在原始图像上面进行深度卷积,然后分别在不同的特征层上面进行预测。它的优点是在不同的层上面输出对应的目标,不需要经过所有的层才输出对应的目标(即对于有些目标来说,不需要进行多余的前向操作),这样可以在一定程度上对网络进行加速操作,同时可以提高算法的检测性能。它的缺点是获得的特征不鲁棒,都是一些弱特征(因为很多的特征都是从较浅的层获得的)。
终于轮到FPN啦,它的架构如图d所示,整个过程如下所示:首先我们在输入的图像上进行深度卷积,然后对Layer2上面的特征进行降维操作(即添加一层1*1的卷积层),对Layer4上面的特征就行上采样操作,使得它们具有相应的尺寸,然后对处理后的Layer2和处理后的Layer4执行加法操作(对应元素相加),将获得的结果输入到Layer5中去。其背后的思路是为了获得一个强语义信息,这样可以提高检测性能。认真的你可能观察到了,这次我们使用了更深的层来构造特征金字塔,这样做是为了使用更加鲁棒的信息;除此之外,我们将处理过的低层特征和处理过的高层特征进行累加,这样做的目的是因为低层特征可以提供更加准确的位置信息,而多次的降采样和上采样操作使得深层网络的定位信息存在误差,因此我们将其结合其起来使用,这样我们就构建了一个更深的特征金字塔,融合了多层特征信息,并在不同的特征进行输出。这就是上图的详细解释。(个人观点而已)
二,FPN框架解析
2.1 利用FPN构建Faster R-CNN检测器步骤
- 首先,选择一张需要处理的图片,然后对该图片进行预处理操作;
- 然后,将处理过的图片送入预训练的特征网络中(如ResNet等),即构建所谓的bottom-up网络;
- 接着,如图5所示,构建对应的top-down网络(即对层4进行上采样操作,先用1x1的卷积对层2进行降维处理,然后将两者相加(对应元素相加),最后进行3x3的卷积操作,最后);
- 接着,在图中的4、5、6层上面分别进行RPN操作,即一个3x3的卷积后面分两路,分别连接一个1x1的卷积用来进行分类和回归操作;
- 接着,将上一步获得的候选ROI分别输入到4、5、6层上面分别进行ROI Pool操作(固定为7x7的特征);
- 最后,在上一步的基础上面连接两个1024层的全连接网络层,然后分两个支路,连接对应的分类层和回归层;
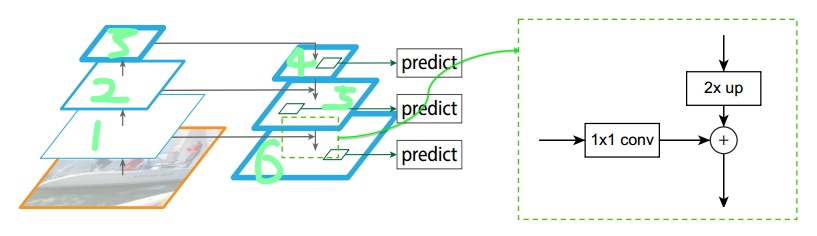
图5 FPN整体架构
注:层1、2、3对应的支路就是bottom-up网络,就是所谓的预训练网络,文中使用了ResNet网络;由于整个流向是自底向上的,所以我们叫它bottom-up;层4、5、6对应的支路就是所谓的top-down网络,是FPN的核心部分,名字的来由也很简单。
2.2 为什么FPN能够很好的处理小目标?
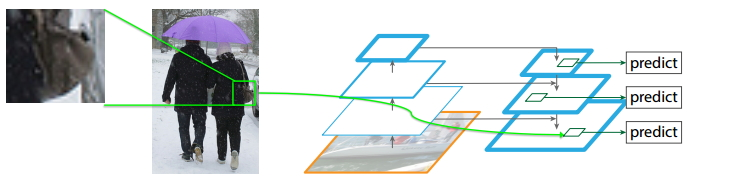
图6 FPN处理小目标
如上图所示,FPN能够很好地处理小目标的主要原因是:
- FPN可以利用经过top-down模型后的那些上下文信息(高层语义信息);
- 对于小目标而言,FPN增加了特征映射的分辨率(即在更大的feature map上面进行操作,这样可以获得更多关于小目标的有用信息),如图中所示;
四,FPN总结
- FPN 构架了一个可以进行端到端训练的特征金字塔;
- 通过CNN网络的层次结构高效的进行强特征计算;
- 通过结合bottom-up与top-down方法获得较强的语义特征,提高目标检测和实例分割在多个数据集上面的性能表现;
- FPN这种架构可以灵活地应用在不同地任务中去,包括目标检测、实例分割等;
以下是FPN网络的架构细节图。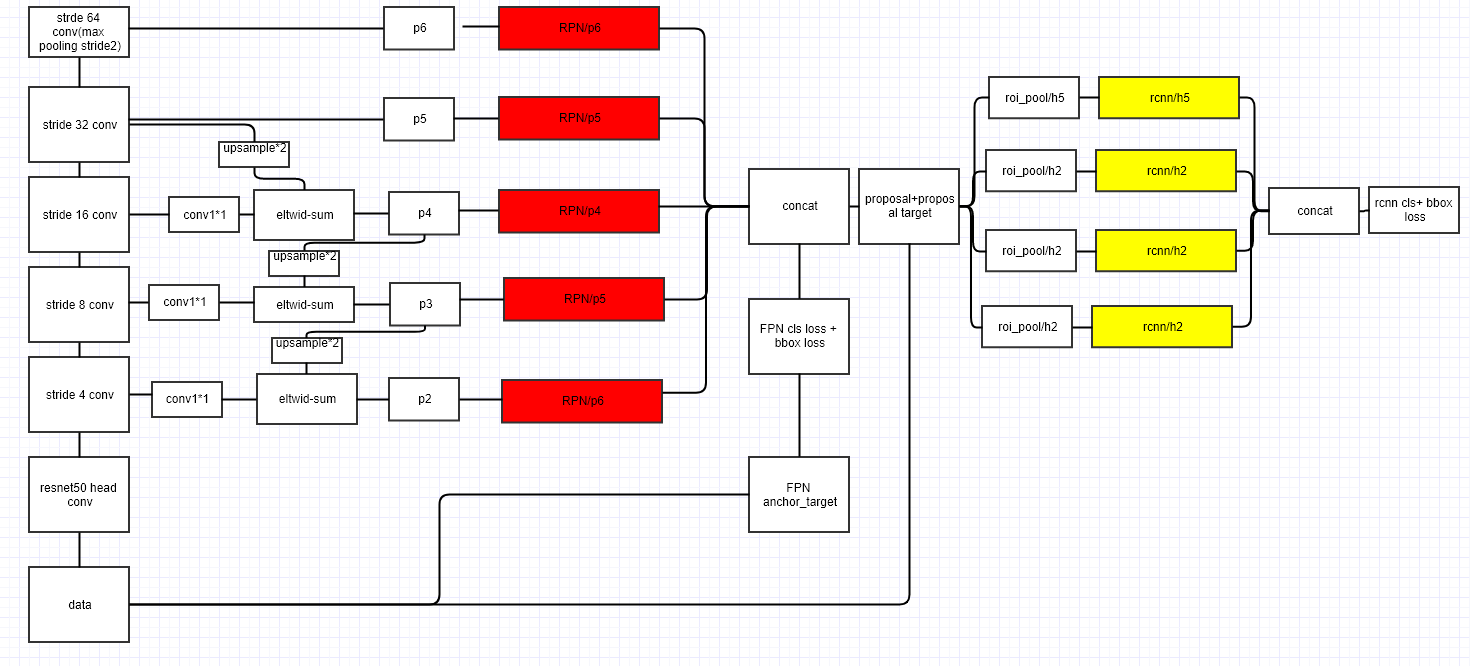
图9 Faster R-CNN + FPN细节图
转自:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号