环境光照和球谐函数
球谐函数
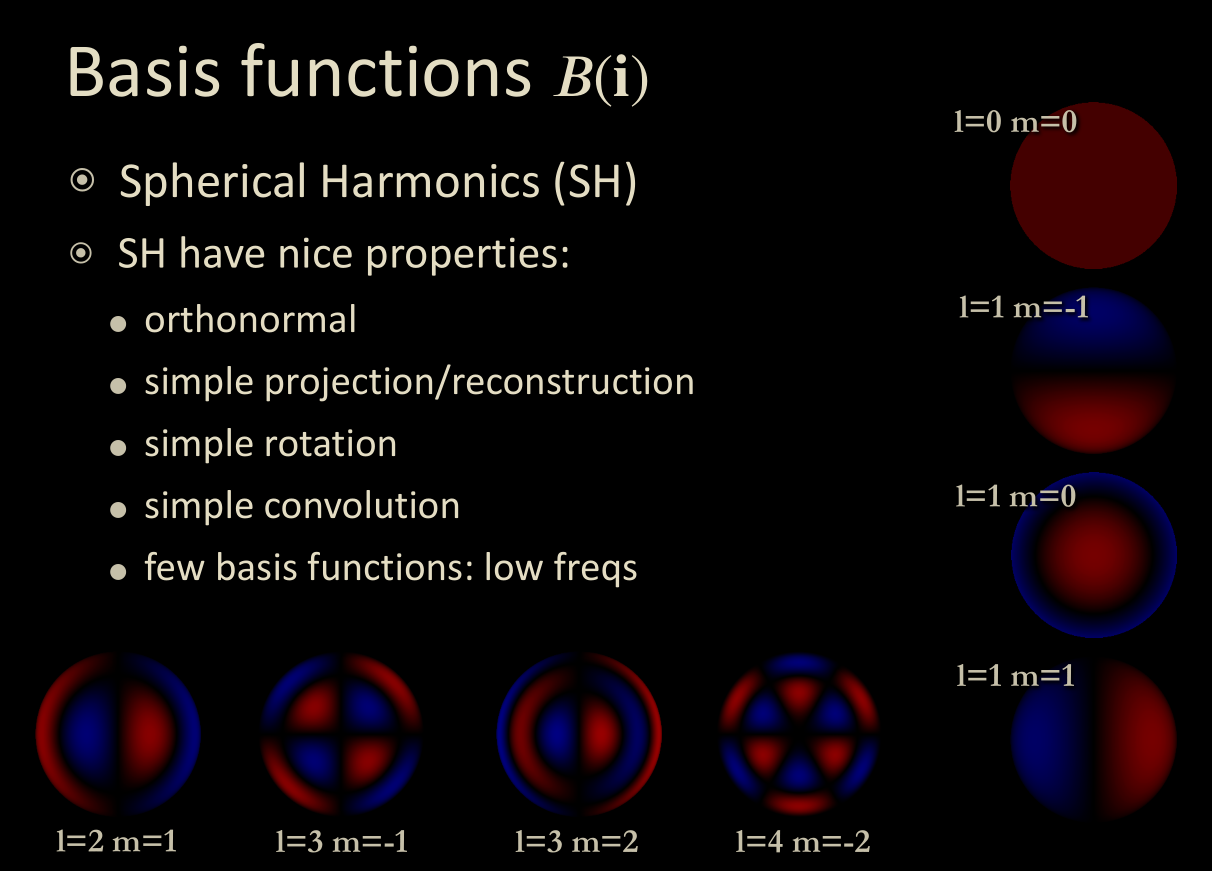
Spherical Harmonics
输入:x,y,z 三维,表示一个空间方向,或者球面坐标系下表示方位角的两个角度。
输出:v 一维
组成:函数本身有一系列基函数以及其对应系数组成
定义:
\[f(\omega) = \sum_{i}{c_i B_i(\omega)}
\]
可视化:
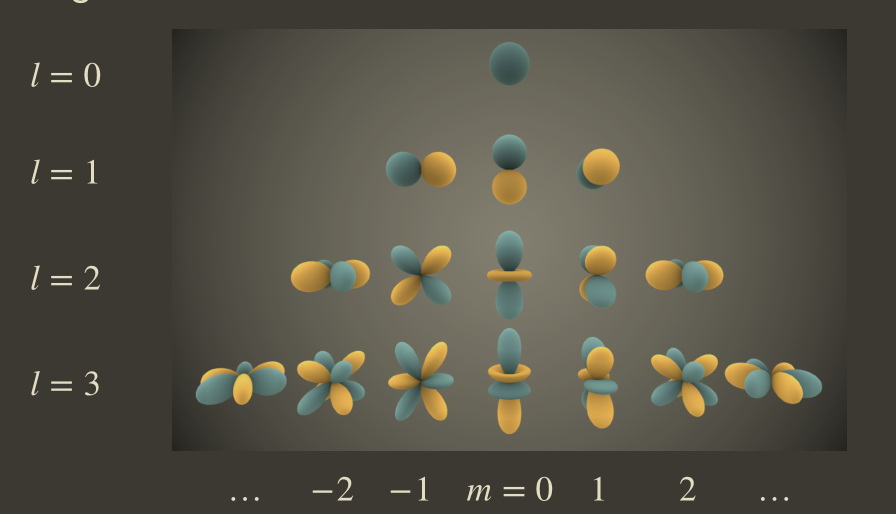
基函数分为若干阶(参数L),第L阶基函数总共含有2L+1个基函数,L阶球谐函数总共由1+3+....+(2L+1) = (L+1)^2 个基函数组成。
越高阶基函数中含有更多高频信息。
code:
double EvalSH(int l, int m, const Eigen::Vector3d& dir) {
if (l <= kHardCodedOrderLimit) {
// Validate l and m here (don't do it generally since EvalSHSlow also
// checks it if we delegate to that function).
CHECK(l >= 0, "l must be at least 0.");
CHECK(-l <= m && m <= l, "m must be between -l and l.");
CHECK(NearByMargin(dir.squaredNorm(), 1.0), "dir is not unit.");
switch (l) {
case 0:
return HardcodedSH00(dir);
case 1:
switch (m) {
case -1:
return HardcodedSH1n1(dir);
case 0:
return HardcodedSH10(dir);
case 1:
return HardcodedSH1p1(dir);
}
case 2:
switch (m) {
case -2:
return HardcodedSH2n2(dir);
case -1:
return HardcodedSH2n1(dir);
case 0:
return HardcodedSH20(dir);
case 1:
return HardcodedSH2p1(dir);
case 2:
return HardcodedSH2p2(dir);
}
case 3:
switch (m) {
case -3:
return HardcodedSH3n3(dir);
case -2:
return HardcodedSH3n2(dir);
case -1:
return HardcodedSH3n1(dir);
case 0:
return HardcodedSH30(dir);
case 1:
return HardcodedSH3p1(dir);
case 2:
return HardcodedSH3p2(dir);
case 3:
return HardcodedSH3p3(dir);
}
case 4:
switch (m) {
case -4:
return HardcodedSH4n4(dir);
case -3:
return HardcodedSH4n3(dir);
case -2:
return HardcodedSH4n2(dir);
case -1:
return HardcodedSH4n1(dir);
case 0:
return HardcodedSH40(dir);
case 1:
return HardcodedSH4p1(dir);
case 2:
return HardcodedSH4p2(dir);
case 3:
return HardcodedSH4p3(dir);
case 4:
return HardcodedSH4p4(dir);
}
}
// This is unreachable given the CHECK's above but the compiler can't tell.
return 0.0;
} else {
// Not hard-coded so use the recurrence relation (which will convert this
// to spherical coordinates).
return EvalSHSlow(l, m, dir);
}
}
// Hardcoded spherical harmonic functions for low orders (l is first number
// and m is second number (sign encoded as preceeding 'p' or 'n')).
//
// As polynomials they are evaluated more efficiently in cartesian coordinates,
// assuming that @d is unit. This is not verified for efficiency.
double HardcodedSH00(const Eigen::Vector3d& d) {
// 0.5 * sqrt(1/pi)
return 0.282095;
}
double HardcodedSH1n1(const Eigen::Vector3d& d) {
// -sqrt(3/(4pi)) * y
return -0.488603 * d.y();
}
double HardcodedSH10(const Eigen::Vector3d& d) {
// sqrt(3/(4pi)) * z
return 0.488603 * d.z();
}
double HardcodedSH1p1(const Eigen::Vector3d& d) {
// -sqrt(3/(4pi)) * x
return -0.488603 * d.x();
}
double HardcodedSH2n2(const Eigen::Vector3d& d) {
// 0.5 * sqrt(15/pi) * x * y
return 1.092548 * d.x() * d.y();
}
double HardcodedSH2n1(const Eigen::Vector3d& d) {
// -0.5 * sqrt(15/pi) * y * z
return -1.092548 * d.y() * d.z();
}
double HardcodedSH20(const Eigen::Vector3d& d) {
// 0.25 * sqrt(5/pi) * (-x^2-y^2+2z^2)
return 0.315392 * (-d.x() * d.x() - d.y() * d.y() + 2.0 * d.z() * d.z());
}
double HardcodedSH2p1(const Eigen::Vector3d& d) {
// -0.5 * sqrt(15/pi) * x * z
return -1.092548 * d.x() * d.z();
}
double HardcodedSH2p2(const Eigen::Vector3d& d) {
// 0.25 * sqrt(15/pi) * (x^2 - y^2)
return 0.546274 * (d.x() * d.x() - d.y() * d.y());
}
double HardcodedSH3n3(const Eigen::Vector3d& d) {
// -0.25 * sqrt(35/(2pi)) * y * (3x^2 - y^2)
return -0.590044 * d.y() * (3.0 * d.x() * d.x() - d.y() * d.y());
}
double HardcodedSH3n2(const Eigen::Vector3d& d) {
// 0.5 * sqrt(105/pi) * x * y * z
return 2.890611 * d.x() * d.y() * d.z();
}
double HardcodedSH3n1(const Eigen::Vector3d& d) {
// -0.25 * sqrt(21/(2pi)) * y * (4z^2-x^2-y^2)
return -0.457046 * d.y() * (4.0 * d.z() * d.z() - d.x() * d.x()
- d.y() * d.y());
}
double HardcodedSH30(const Eigen::Vector3d& d) {
// 0.25 * sqrt(7/pi) * z * (2z^2 - 3x^2 - 3y^2)
return 0.373176 * d.z() * (2.0 * d.z() * d.z() - 3.0 * d.x() * d.x()
- 3.0 * d.y() * d.y());
}
double HardcodedSH3p1(const Eigen::Vector3d& d) {
// -0.25 * sqrt(21/(2pi)) * x * (4z^2-x^2-y^2)
return -0.457046 * d.x() * (4.0 * d.z() * d.z() - d.x() * d.x()
- d.y() * d.y());
}
double HardcodedSH3p2(const Eigen::Vector3d& d) {
// 0.25 * sqrt(105/pi) * z * (x^2 - y^2)
return 1.445306 * d.z() * (d.x() * d.x() - d.y() * d.y());
}
double HardcodedSH3p3(const Eigen::Vector3d& d) {
// -0.25 * sqrt(35/(2pi)) * x * (x^2-3y^2)
return -0.590044 * d.x() * (d.x() * d.x() - 3.0 * d.y() * d.y());
}
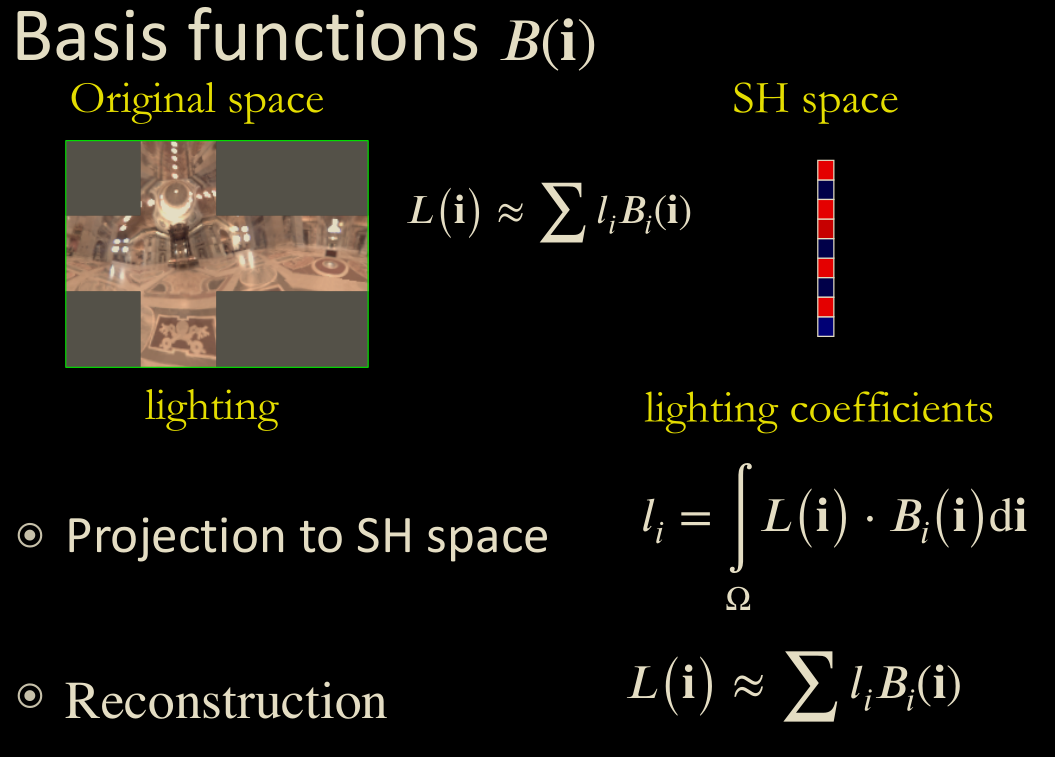
投影(参数获取):
Projection: obtaining the coefficients of each SH basis function
\[c_i = \int_{\Omega}{f(\omega)B_i(\omega)d\omega}
\]
f(w)为原始输入,被拟合函数。
重构:获得系数后,用球谐函数简化表达原始内容
\[f(\omega) = \sum_{i}{c_i B_i(\omega)}
\]
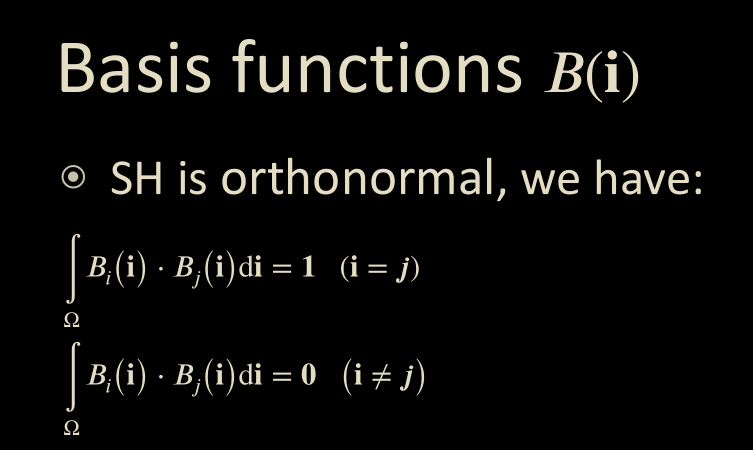
性质:
用法:
可用于拟合一个输入三维,输出一维的任意function,典型的就是环境光照。
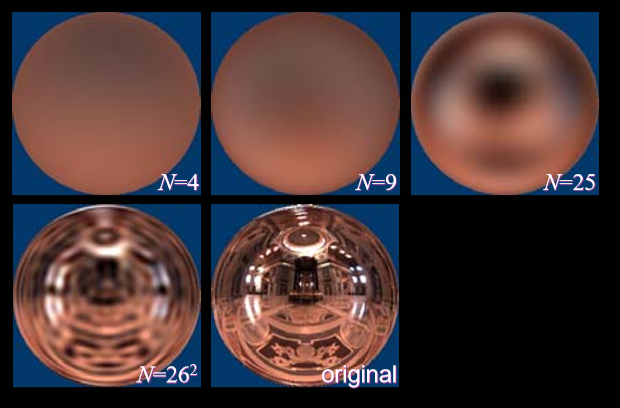
使用越高阶的球谐函数,可还原更多的原始输入的细节。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号