动态规划(Ⅲ)
前言
这部分主要讲一讲 DP 优化的一些方法,显然我的实力不太够,所以只能写一些比较简单的东西。
如动态规划(Ⅰ)中提到的,动态规划的优化一般就可以从两个方面入手:一个是状态表示、另一个是决策集合,也就是状态转移的角度来优化。下文主要就是分别从这两个角度,阐述不同的 DP 优化方法。
倍增优化 DP
倍增优化 DP,是从状态表示的方面来进行 DP 优化。简单来说,因为动态规划经常采用按阶段的递推形式实现,所以也可以按照类似的方法,使用倍增把阶段的线性增长优化为成倍增长,也就是把一段 \(\mathcal O(n)\) 的部分优化成 \(\mathcal O(\log n)\),显然,优化效果显著。
下面给一道例题来讲一下倍增优化 DP 的方式。
例题
题面太长了就不放了。
这道题 \(70\) 分代码是比较好写的,建议先写一下 \(70\) 分的 \(\mathcal O(n^2)\) 做法:
维护四个数组 \(city_1[i],city_2[i],dis_1[i],dis_2[i]\),分别表示距离城市 \(i\) 最近的城市,次近的城市,以及它们分别到城市 \(i\) 的距离。我们朴素地暴力 \(\mathcal O(n^2)\) 便能解决这个问题。
然后对于两个问题,我们便运用这四个数组,\(O(nm)\) 的枚举即可,没啥难度。
code
然后我们考虑怎么优化,其实这个题我感觉不像是一个真正的 DP,因为你一旦确定了起点,其实你的路径就是固定的了,而正是因为这个性质,使得我们可以采用倍增的方法来优化我们的复杂度。
倍增优化 DP
想要倍增优化,我们就考虑我们想知道什么:行驶到了哪座城市、小 A 行驶的路程、小 B 行驶的路程。根据这个,我们设出倍增 DP 的数组:
下文中,\(k=0\) 代表小 A 开车,\(k=1\) 代表小 B 开车。
设 \(f_{i,j,k}\) 表示从城市 \(j\) 出发,行驶 \(2^i\) 天,\(k\) 先开车,最终会到达的城市;
设 \(da_{i,j,k}\) 表示从城市 \(j\) 出发,行驶 \(2^i\) 天,\(k\) 先开车,小 A 行驶的路程;
设 \(db_{i,j,k}\) 表示从城市 \(j\) 出发,行驶 \(2^i\) 天,\(k\) 先开车,小 B 行驶的路程。
假设我们已经知道了暴力解法中的四个数组的值,我们考虑怎么求倍增数组。
初值的设定:
f[0][i][0] = city2[i], f[0][i][1] = city1[i];
da[0][i][0] = dis2[i], da[0][i][1] = 0;
db[0][i][0] = 0 ,db[0][i][1] = dis1[i];
结合数组意义应该不难看懂,接下来,我们按照预处理倍增数组的一般思路,递增第一维。
需要注意的是,当 \(i=1\) 时,我们从 \(i=0\) 扩展而来,这时候司机是变了一个人的;而当 \(i>1\) 时,我们从 \(i-1\) 转移而来,这时第 \(2^i\) 天和 \(2^{i-1}\) 天都是偶数,是由同一个人转移而来,所以要分类讨论一下。
当 \(i=1\) 时:
f[1][j][k] = f[0][f[0][j][k]][k ^ 1];
da[1][j][k] = da[0][j][k] + da[0][f[0][j][k]][k ^ 1];
db[1][j][k] = db[0][j][k] + db[0][f[0][j][k]][k ^ 1];
当 \(i>1\) 时:
f[i][j][k] = f[i - 1][f[i - 1][j][k]][k];
da[i][j][k] = da[i - 1][j][k] + da[i - 1][f[i - 1][j][k]][k];
db[i][j][k] = db[i - 1][j][k] + db[i - 1][f[i - 1][j][k]][k];
求解问题
朴素的求解问题是一步一步模拟走过的城市。有了倍增数组后,我们自然就可以进行倍增跳步了。具体实现如下:
-
我们给定 \(pos=0,disA = 0 ,disB= 0\),分别表示现在在哪个城市,小 A 的路程,小 B 的路程。
-
令 \(i\) 从 \(\log n\) 枚举到 \(0\),判断 \(f_{i,pos,0}\) 是否越界,并且 \(disA + disB + da_{i,pos,0} + db_{i,pos,0} \leq x\) 是否成立。如果不越界且成立,那么就直接令 \(pos=f_{i,pos,0},disA += da_{i,pos,0},disB += db_{i,pos,0}\),这也就实现了我们的跳步操作。
第二步结束后,\(disA\) 和 \(disB\) 就可以求出来了,有了这个,问题 \(1,2\) 就都很好解决了,我们就可以在 \(\mathcal O(n\log n)\) 的时间下解决问题。
dis = disA = disB = 0 , pos = i;
for(re int j=18;j>=0;j--)
{
if(f[j][pos][0] != n+1 && disA + disB + da[j][pos][0] + db[j][pos][0] <= x)
{
disA += da[j][pos][0];
disB += db[j][pos][0];
pos = f[j][pos][0];
}
}
解决根源的初始化
其实我们发现,我们还漏了一个地方,也就是那四个数组的初始化其实还是 \(\mathcal O(n^2)\) 的,但因为这个地方的优化跟倍增没有关系,所以放到最后来说。
具体来说,我们维护一个 multiset,存储节点编号和节点高度,初始时我们插入 \(4\) 个边界,两个 \(-\inf\),两个 \(\inf\),然后我们从右向左将每个城市插入进去,然后利用 multiset \(\mathcal O(\log n)\) 的查询它的前驱,前驱的前驱,后继,后继的后继,然后取一个最小值和次小值即可。(multiset 里面按高度从小到大排序)。
这样一来,初始化也是 \(\mathcal O(n\log n)\) 的了,综上,我们运用倍增优化 DP,就在 \(\mathcal O((n+m)\log n)\) 解决了这个问题。
此外的例题还有 AcWing294.计算重复,这里有两种倍增的手法,但其中一种更为优秀,具体可以看第一篇题解。
总结
倍增优化 DP 其实感觉不怎么像是 DP,因为能使用倍增 DP 的前提是,每个路线是已经确定的了,是静态的。当然这其中也有 DP 的思想,因为我们设的倍增数组其实就是 DP 的体现。
数据结构优化 DP
倍增 DP 是从状态表示入手,对 DP 进行的优化,而状压 DP 虽然称不上是一种优化,但他同样也是从状态表示出发,进行的 DP。
当状态表示和状态转移方程确定后,我们的主要问题就是如何优化我们的转移。
在前文中我们提到,在实现状态转移方程时,要注意观察决策集合的范围随着状态的变化情况。对于“决策集合中的元素只增加不减少”的情景,就可以只用一个变量维护最值,不断与新加入的集合元素比较,即可得到最优决策,从而 \(O(1)\) 地转移。
但是在更复杂的情况下,我们就要用更加高级的数据结构(而不是一个小小的变量)维护 DP 决策的候选集合,以便快速执行插入元素、删除元素,查询最值等操作,把朴素的暴力枚举时间降到维护数据结构的时间,这就是数据结构优化 DP 的意义。
例题
P4644 [USACO05DEC] Cleaning Shifts S
有一个很长的纸条,被分成了若干长度为 \(1\) 的小纸条。其中从第 \(L\) 个到 第 \(R\) 个纸条被污染了。\(N\) 个贴纸。每个贴纸能覆盖的区间是 \([S_i,E_i]\),售价为 \(c_i\),问最少需要多少钱能把这个区间覆盖。无解输出 \(-1\)。
\(0\leq L\leq R \leq 86399,N\le 10^4,L \le S_i\le E_i\le R,0 \leq c_i \leq 5 \times 10^5\)
我们先判断我们要维护什么信息:覆盖的区间,覆盖的花费,可以看出,这个题的阶段就是覆盖的区间,状态就是区间 + 花费。
我们设 \(f_i\) 表示覆盖 \([L,i]\) 这个区间所需要的最小花费。
为了便于转移,我们将每个人按照右端点 \(E_i\) 递增排序,那么有状态转移方程:
其实就是枚举是否能接起来,覆盖区间必须有交或者刚好相邻。
那我们就可以进行 DP 了,初值 \(f_0= 0\),其余为 \(\inf\)。最终答案就是 \(f_T\)。
设 \(|S| = R-L\),那么朴素 DP 是 \(\mathcal O(N|S|)\) 的,我们考虑怎么优化。
我们观察状态转移方程,发现这其实是一个查询区间最小值的操作,并且会有修改操作,因为 \(f\) 是在不断更新的。我们很自然的就能想出用线段树来解决这个问题,这样我们就可以在 \(\mathcal O(\log |S|)\) 的时间内完成这个问题。时间复杂度 \(\mathcal O(N\log |S|)\)。
需要注意的一点是,我们是在 \([L-1,R]\) 上建立的线段树而并非 \([L,R]\),因为状态转移方程中左端点是 \(S_i-1\)。
同时,我们可以将整个区间左移 \(L-1\),这样 \(L=1\),比较清晰一点。
#include<bits/stdc++.h>
#define int long long
#define ll long long
#define next nxt
#define re register
#define il inline
const int N = 1e6 + 5;
const int INF = 1e11;
using namespace std;
int max(int x,int y){return x > y ? x : y;}
int min(int x,int y){return x < y ? x : y;}
int n,R;
int f[N];
struct node{
int l,r;
int cost;
}a[N];
int tree[N<<2];
il int read()
{
int f=0,s=0;
char ch=getchar();
for(;!isdigit(ch);ch=getchar()) f |= (ch=='-');
for(; isdigit(ch);ch=getchar()) s = (s<<1) + (s<<3) + (ch^48);
return f ? -s : s;
}
#define lc p<<1
#define rc p<<1|1
il void build(int p,int l,int r)
{
if(l == r)
{
tree[p] = INF;
return ;
}
int mid = (l+r) >> 1;
build(lc,l,mid) , build(rc,mid+1,r);
tree[p] = min(tree[lc],tree[rc]);
}
il void Modify(int pos,int l,int r,int p,int k)
{
if(l == pos && r == pos)
{
tree[p] = k;
return ;
}
int mid = (l+r) >> 1;
if(pos <= mid) Modify(pos,l,mid,lc,k);
if(pos > mid) Modify(pos,mid+1,r,rc,k);
tree[p] = min(tree[lc],tree[rc]);
}
il int Query(int nl,int nr,int l,int r,int p)
{
int ans = INF;
if(nl <= l && r <= nr) return tree[p];
int mid = (l+r) >> 1;
if(nl <= mid) ans = min(ans,Query(nl,nr,l,mid,lc));
if(nr > mid) ans = min(ans,Query(nl,nr,mid+1,r,rc));
return ans;
}
il bool cmp(node a,node b) { return a.r < b.r; }
signed main()
{
n = read() , R = read();
for(re int i=1;i<=n;i++)
{
a[i].l = read() , a[i].r = read();
a[i].cost = 1;
}
sort(a+1,a+n+1,cmp);
build(1,0,R);
Modify(0,0,R,1,0);
for(re int i=1;i<=R;i++) f[i] = INF;
f[0] = 0;
for(re int i=1;i<=n;i++)
{
int Min = Query(a[i].l-1,a[i].r-1,0,R,1);
f[a[i].r] = min(f[a[i].r],Min + a[i].cost);
Modify(a[i].r,0,R,1,f[a[i].r]);
}
if(f[R] == INF) cout << -1; else cout << f[R];
return 0;
}
\(T\) 组数据,在长度为 \(n\) 的数列 \(a\) 中,求出长度为 \(m\) 的严格上升子序列的个数。答案对 \(10^9 + 7\) 取模。
\(1\leq m \leq n \leq 1000,1\leq a_i \leq 10^9,1\leq T \leq 100\)
LIS 计数问题。我们先考虑我们之前学过的 LIS 问题。
在 LIS 问题中,我们存在 \(\mathcal O(n^2)\) 的朴素解法,也有贪心+二分的 \(\mathcal O(n\log n)\) 和树状数组优化的 \(\mathcal O(n\log n)\) 解法。其中,朴素枚举太慢,二分+贪心的思路在计数问题中就显得困难,而树状数组优化就显现出了优越性。我们将在下文中,讲讲为什么可以用树状数组。
首先对于 LIS 计数,我们先从朴素出发:设 \(f_{i,j}\) 表示考虑到了前 \(i\) 个数并且以 \(a_i\) 结尾的数列中,长度为 \(j\) 的严格上升子序列有多少个,显然有状态转移方程:
我们可以写出代码来看一看。
a[0] = 0 , f[0][0] = 1;
for(re int j=1;j<=m;j++)//枚举长度
for(re int i=1;i<=n;i++)
for(re int k=0;k<i;k++)//决策集合
if(a[k] < a[i])
f[i][j] = (f[i][j] + f[k][j-1]) % mod;
我们发现,在内层循环 \(i\) 和 \(k\) 转移的时候,外层循环 \(j\) 是个定值。我们又发现,当 \(i\) 增加 \(1\) 时,\(k\) 的取值范围从 \(0\leq k < i\) 变成了 \(0 \leq k < i+1\),也就是只多了一个决策点。所以,我们需要维护一个决策候选集合,其中每个决策可以用一个二元组 \((a_k,f_{k,j-1})\) 来表示。
-
- 插入一个新的决策。在 \(i\) 自增 \(1\) 之前,把 \((a_i,f_{i,j-1})\) 加入决策候选集合。
-
- 给定一个 \(a_i\) 查询所有 \(a_k < a_i\) 的 \(f_{k,j-1}\) 的和。
如果把 \(a_i\) 当作编号,\(f_{i,j-1}\) 当作权值,你会发现这就是一个单点更新,区间求和的数据结构,于是,我们能很自然的想到用树状数组来维护。这个维护的过程其实和树状数组求逆序对的过程很类似。插入决策前,我们就在 \(a_i\) 的位置上插入 \(f_{i,j-1}\),在查询的时候,对区间 \([0,a_i-1]\),在树状数组求一个前缀和即可。这样,整个算法的复杂度就从 \(\mathcal O(n^2m)\) 变成了 \(\mathcal O(nm\log n)\)。
此外要注意的是,\(a_i\) 的值域很大,而这个题我们并不关心 \(a_i\) 的值具体是多少,只关心它们的相对大小,所以离散化一下即可。
il int lowbit(int x) { return x&(-x); }
il void add(int x,int k) { for(;x<=len;x+=lowbit(x)) BIT[x] = (BIT[x]+k) % mod; }
il int Query(int x) { int res=0; for(;x;x-=lowbit(x)) res = (res+BIT[x]) % mod; return res; }
signed main()
{
n = read() , m = read();
for(re int i=1;i<=n;i++) a[i] = read() , b[i] = a[i] , f[i][1] = 1;
sort(b+1,b+n+1);
len = unique(b+1,b+n+1) - b - 1;
for(re int i=1;i<=n;i++) a[i] = lower_bound(b+1,b+len+1,a[i]) - b;//离散化
for(re int j=2;j<=m;j++)
{
memset(BIT , 0 , sizeof BIT);
//因为树状数组中存储的其实是f_{i,j-1},所以对于一个新的 $j$
//要注意清空 BIT 数组
for(re int i=1;i<=n;i++)
{
f[i][j] = Query(a[i]-1);//前缀和
add(a[i],f[i][j-1]);//加入决策集合
}
}
for(re int i=1;i<=n;i++) ans = (ans + f[i][m]) % mod;
cout << ans;
}
总结
在不同的问题中,我们采用了不同的方法去维护。当决策集合只增不减时,我们运用一个变量去解题;在第一个例题中,右端点递增,但左端点没有什么明显的性质,我们采用了数据结构去维护;在第二个例题中,取值范围有两个限制:数组下标以及 \(a\) 的值,我们在枚举的过程中保证了数组下标的递增,对于 \(a\) 值,我们采用了树状数组去维护,这其实就是我们在数列 \(a\) 这个坐标轴上建立了以 \(f\) 数组中的状态为值的数据结构。
在不同的题目中,我们往往需要根据题目的情况,来判断我们需要什么,应该运用什么样的数据结构。题目千变万化,但是我们有一个优化的大致思路:也就是考虑状态转移的决策集合的变化情况,从而考虑如何去优化它的转移。
单调队列优化 DP(\(t\)D/\(e\)D)
单调队列,本质上也是一种数据结构。但是因为它跟线段树、树状数组、平衡树那类数据结构优化 DP 的方式不完全一样,所以把它单独拿出来说说。
适用情况
单调栈和单调队列两种数据结构,本质上都是借助单调性,及时排除不可能的决策,保持候选集合答案的有效性和有序性。我们先用一个例子来引入:
我们将问题转化成前缀和后,容易发现问题转化成了一种类似于 DP 的形式:
朴素计算时,我们枚举 \(i,j\),是一个 \(\mathcal O(nm)\) 的算法。但,我们观察一下它的性质:
当 \(i\) 增大 \(1\) 时,\(j\) 的取值范围同时 \(+1\),由 \([i-m,i-1]\) 变为 \([i-m+1,i]\)。这意味着不仅有一个新的决策 \(j=i\) 进入决策候选集合,也应该把旧的 \(j=i-m\) 的决策从决策集合中删除。你会发现这非常适合用单调队列来维护,因为单调队列就适用于维护决策取值范围的上下界均单调变化,每个决策在候选集合中插入或删除至多一次的问题,在这个问题中,我们用单调队列维护最小值,便可以让转移变为均摊 \(\mathcal O(1)\),最后的复杂度就是 \(\mathcal O(n)\)。
接下来我们给出例题。
例题
\(n\) 块木板从左到右排成一行,有 \(m\) 个工匠对这些木板进行粉刷,每块木板至多被粉刷一次。第 \(i\) 个工匠要么不刷,要么刷包含木板 \(s_i\) 的、长度不超过 \(L_i\) 的一段连续的木板,每粉刷一块可以得到 \(p_i\) 的报酬,问如何安排能够使工匠们获得的总报酬最大。\(1\leq n \leq 16000,1\leq m \leq 100\)。
首先手玩一下你会发现,\(s_i\) 靠后的刷的范围一定在 \(s_i\) 靠前的人的刷的范围之后,这样才能保证最大化收益。所以我们先对所有的工匠按照 \(s_i\) 从小到大排序,这样我们就能进行线性 DP 了。
观察我们描述一个状态需要什么:用了几个工匠,刷了多少板子。利用这两个信息,我们便可以描述一个状态了。
设 \(f(i,j)\) 表示考虑到前 \(i\) 个人,它们刷了前 \(j\) 块木板(注意,有的地方可能不刷),工匠能获得的最高报酬,我们把这个集合划分一下。
-
首先第 \(i\) 个人可刷可不刷,如果不刷,\(f(i,j) = f(i-1,j)\);
-
如果他刷,再考虑第 \(j\) 个木板刷不刷,如果不刷,\(f(i,j) = f(i,j-1)\);
-
如果它刷第 \(j\) 个木板,需要满足一些条件:假设它刷的是第 \(k+1\) 到第 \(j\) 块木板。那么,我们要保证 \(j-k \leq L_i\) 并且 \(k+1 \leq s_i \leq j\),这样才能转移,于是有状态转移方程:
\[f(i,j) = \max_{j-L_i \leq k \leq s_i-1}\{f(i-1,k)+p_i \times (j-k)\} \]
这个题的重难点就在这,前两个转移都很好转移,我们重点考虑这个。
首先,朴素转移的时间复杂度是 \(\mathcal O(n^2m)\) 的,不大优秀。这就需要我们观察一些性质来去优化,通过观察,我们能发现的性质有:
-
当外层循环 \(i\) 不变时,若 \(j\) 增加 \(1\),那么决策集合,也就是 \(k\) 的取值范围就由 \([j-L_i,s_i-1]\) 变为 \([j-L_i+1,s_i-1]\),也就是上界不变,下界增加。
-
在 \(j\) 不变时,\(p_i \times j\) 其实是不变的,可以把它从 \(\max\) 中提取出来,式子变成:
\[ f(i,j) = p_i \times j + \max_{j-L_i \leq k \leq s_i-1}\{f(i-1,k)-p_i \times k\} \]
因为上界不变,下界递增,我们可以考虑运用单调队列维护,维护的信息就是这个 \(\max\) 里的最大值,同时当 \(j\) 增加 \(1\) 的时候,把过时的 \(j-L_i\) 踢出决策;同时,若 \(j<s_i\),也就是 \(j\) 能新加入决策集合的时候,把它加到决策集合里,而若 \(j\geq s_i\) 了,它就不符合 \(k\) 的范围了,就不加进去了。这样,当 \(i\) 恒定时,每个元素至多进队出队一次,转移的复杂度就是均摊 \(\mathcal O(1)\) 的,这样总复杂度就是 \(\mathcal O(nm)\) 的,可以通过。
int n,m;
int f[M][N];
int head,tail,q[N];
struct node{
int l,p,s;
friend bool operator < (const node &a,const node &b) {
return a.s < b.s;
}
}a[N];
signed main()
{
n = read() , m = read();
for(re int i=1;i<=m;i++) a[i].l = read() , a[i].p = read() , a[i].s = read();
sort(a+1,a+m+1);//f[i][j] 表示考虑到了前i个人和考虑到了前j个板子的情况
for(re int i=1;i<=m;i++)
{
head = 1 , tail = 0;
int l = a[i].l , p = a[i].p , s = a[i].s;
for(re int j=0;j<=n;j++)
{
f[i][j] = f[i-1][j];
if(j) f[i][j] = max(f[i][j],f[i][j-1]);//注意j的范围
while(head <= tail && q[head] < j - l) head++;//删队头
if(head <= tail && j >= s && q[head] >= j - l) f[i][j] = max(f[i][j],f[i-1][q[head]] + p * (j-q[head]));//取最值
if(j < s)//能加才加
{
while(head <= tail && f[i-1][q[tail]] - p * q[tail] <= f[i-1][j] - p * j) tail--;
q[++tail] = j;
}
}
}
cout << f[m][n];
}
还有很多习题,下面给出几个:
-
P1848 [USACO12OPEN] Bookshelf G:一个不是很具有普适性的单调队列优化 DP
单调队列优化多重背包
推荐观看视频:多重背包 单调队列优化 - 董晓算法。
这里就不细讲了,具体原理就是 \(f\) 数组是按类进行更新的,所以可以把 \(f[0\sim m]\) 按体积 \(w\) 分成 \(w\) 个类。
因为多重背包的转移式是
所以说 \(f_j\) 只能由 \(f_{j-w},f_{j-2w},f_{j-cw}\) 转移而来,\(c\) 就是这个物品的个数,所以看出来这其实是一个组,把每个组分开考虑,运用单调队列维护队头和队尾。这样每次每个数只会进队出队最多一次,复杂度就是 \(\mathcal O(nm)\),是最优的了。
for(re int i=1;i<=n;i++)
{
memcpy(g , f , sizeof f);//其实就是把f[i-1][j]的状态存到 g 里,当然你也可以用滚动数组
v = read() , w = read() , c = read();
for(re int j=0;j<w;j++)
{
int head = 1 , tail = 0;
for(re int k=j;k<=m;k+=w)
{
while(head <= tail && q[head] < k - c * w) head++;//判断越界否,就是说f[k]能否由q[head]这部分转移而来
//如果个数差太大,就删掉
if(head <= tail) f[k] = max(g[k],g[q[head]]+(k-q[head])/w*v);//k-q[head]/w就表明选了几个
while(head <= tail && g[k] >= g[q[tail]]+(k-q[tail])/w*v) tail--;//其实省略了(k-k)/w*v,因为是0,所以就不用写上去了
q[++tail] = k;
}
}
}
总结
给张图:
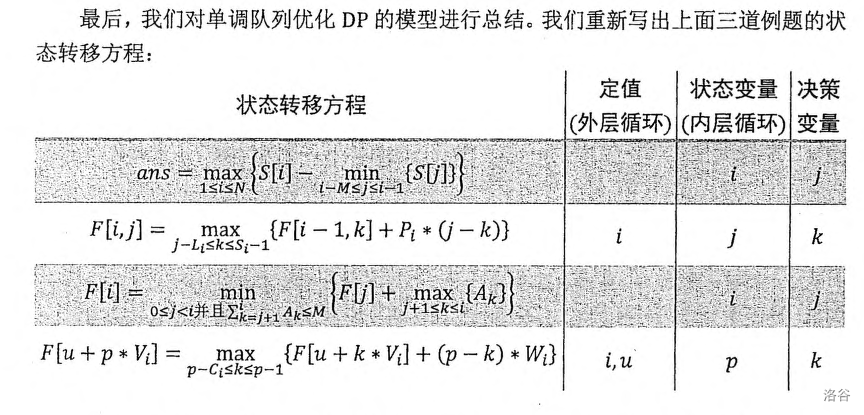
我们发现,只关注“状态变量”和“决策变量”及其所在的维度,这些状态转移方程都可以大致归类成如下的形式:
这个式子所代表的问题覆盖范围广泛,是一个重要的 DP 模型。我们可以看出,这个式子其实是 \(1D/1D\) 的,朴素显然是 \(\mathcal O(n^2)\),但既然我们是从单调队列优化 DP 总结出来的,说明如果这个式子里面的某些值具有某些性质,那么我们就可以优化复杂度。
-
\(L(i),R(i)\) 是关于变量 \(i\) 的一次函数,用来限制决策 \(j\) 的取值范围,并保证上下界的变化具有单调性;
-
\(val(i,j)\) 是一个关于变量 \(i,j\) 的多项式函数,在例题中,我们都是把 \(val(i,j)\) 分成两部分,第一部分仅与 \(i\) 有关,第二部分仅与 \(j\) 有关。当 \(i\) 不变时,我们把第一部分抽出来,这一部分值是不变的,变化的只是第二部分。于是,我们就可以在队列中维护第二部分的单调性,及时排除不优秀的决策,让 DP 复杂度得以优化。
所以,在这种模型中,边界具有单调性,且多项式 \(val(i,j)\) 的每一项仅与 \(i\) 和 \(j\) 中的一个有关,是使用单调队列进行优化的基本条件。
斜率优化(1D)
梦回去年暑假。
在单调队列优化 DP 中,我们给出了 DP 的一个经典模型
并且,我们总结了单调队列优化这种形式的 DP 的基本条件:边界具有单调性,且多项式 \(val(i,j)\) 的每一项仅与 \(i\) 和 \(j\) 中的一个有关。而在斜率优化中,我们将讨论多项式 \(val(i,j)\) 包含 \(i,j\) 的乘积项,即存在一个同时与 \(i\) 和 \(j\) 有关的部分时,该如何进行优化。
建议在阅读本部分前你有一定的计算几何基础,没有也完全没有关系,只是辅助理解而已。
例题
Zero 要打印一个有 \(N\) 个单词的文章,每个单词 \(i\) 的打印成本为 \(C_i\)。在一行中打印 \(k\) 个单词的成本为 \(\displaystyle (\sum_{i=1}^kC_i)^2 +M\),\(M\) 是一个常量。他想知道打印文章的最小成本。\(1\leq N \leq 5 \times 10^5,1\leq M\leq 1000\)
可以看出,这是一个典型的线性 DP,为了优化掉这个 \(\sum\),我们可以做一个 \(C_i\) 的前缀和,记作 \(s_i\),我们设 \(f_i\) 表示打印前 \(i\) 个单词的最小成本,那么有很显然的状态转移方程:
我们要把这个状态转移方程稍作变形,先把 \(\min\) 函数去掉。
把常数、仅与 \(i\) 有关的项、仅与 \(j\) 有关的项,以及 \(i,j\) 的乘积项分开。本着在这次决策中,\(i\) 是不变的,所以我们把含 \(j\) 项看作变量,含 \(i\) 项看作常量。
我们对比一下直线解析式 \(y=kx+b\),你会发现
我们可以看出,当 \(j\) 不同时,\((x,y)\) 就对应着平面上不同的点。
我们明确我们的目标:我们想找到一个 \(j\),使得 \(f_i\) 最小,而此时,\(i\) 是确定的,也就是 \(k\) 是确定的,所以我们就想让截距 \(b\) 最小,如果 \(b\) 最小了,\(f_i\) 就是最小的。
因此,我们目的就是找一个 \((x,y)\),使得 \(y=kx+b\) 中的 \(b\) 最小。接下来我们的目标就转化为了怎么去找这个 \((x,y)\),给个图。
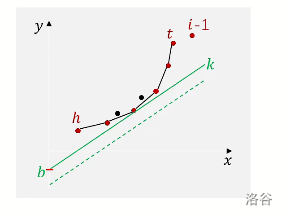
我们发现,这个找 \((x,y)\) 的过程其实就是一条斜率为 \(k\) 的直线从下往上平移,直到经过了一个点的过程,这个点就是我们要找的 \((x,y)\),因为这条直线向上移动的距离是整个决策集合中最短的,也就是 \(b\) 是最小的,那么这个点对应的 \(j\),就是我们要利用进行转移的。
然后你观察一下,所有可能被利用进行转移的 \((x,y)\),一定在决策集合的 \((x,y)\) 构成的下凸壳上,如果不在下凸壳上,那么一定有比它更小的点能先被找到,所以这其实是一个维护下凸壳的过程,维护下凸壳我们可以用单调队列来实现,这就是斜率优化所在的点:它即使排除掉了不可能的决策,使得转移是均摊 \(\mathcal O(1)\) 的。
接下来我们再来看如何去找到这个点。
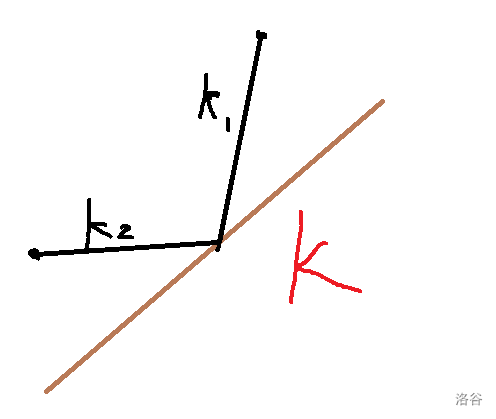
观察这个图,假设这个点和下凸壳上的其余两个点构成的直线的斜率分别是 \(k_1,k_2\),那么我们发现如果 \(k_2 \leq k \leq k_1\),那么这个点就是我们要找的决策点,\(k_1,k_2\) 也很好求,运用斜率公式 \(\displaystyle \frac{y_i-y_j}{x_i-x_j}\) 求一下就行了。
我们再看一下这个题,其中当 \(i\) 增加时,斜率 \(k\) 也是单调递增的,假设我们在这次循环的时候找到了最优决策点 \(j\),那么凸包中在 \(j\) 左侧的点在 \(i\) 变大后,一定不会被选上,有可能被选上的只有在 \(j\) 右边的点,所以我们同时要维护一下队头。
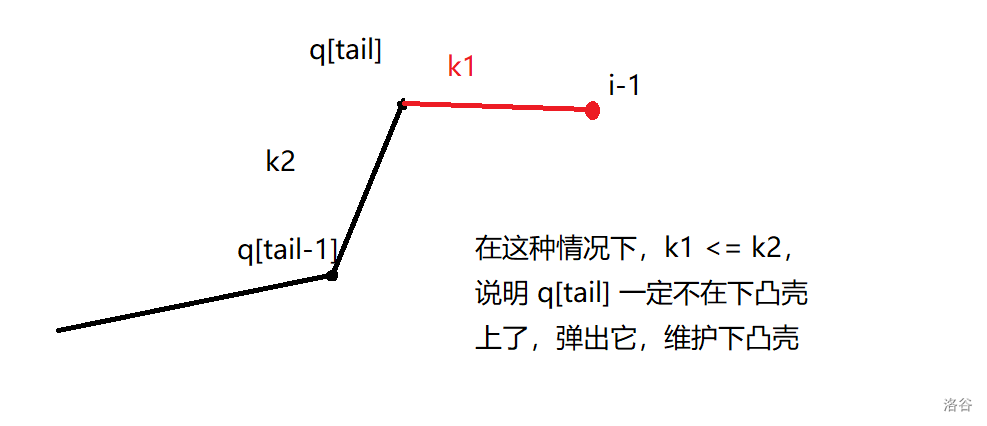
至此,我们整理一下思路。
-
- 若新点 \(i-1\) 与队尾点连线的斜率 \(\leq\) 队尾邻点直线的斜率,则队尾出队,实际上是一个维护下凸壳的过程。
-
- 新点 \(i-1\) 入队
-
- 若队头邻点直线的斜率 \(\leq k_i\),则队头出队,删除不可能被选上的点。
-
- 此时队头就是最优决策点,做状态转移。
这其中有一个化除为乘的 trick,也就是求斜率的时候把
变成
这样做可行的原因是分子都是正的,这样以后就化除为乘,避免了精度误差。
code
il int y(int i) { return f[i] + sum[i] * sum[i]; }
il int x(int i) { return sum[i]; }//用函数表示y 和 x 更为直观
il int dy(int i,int j) { return y(i) - y(j); }//delta y
il int dx(int i,int j) { return x(i) - x(j); }//delta x
signed main()
{
for(re int i=1;i<=n;i++) c[i] = read() , sum[i] = sum[i-1] + c[i];//预处理
head = 1 , tail = 0;
for(re int i=1;i<=n;i++)
{
while(head < tail && dy(i-1,q[tail]) * dx(q[tail],q[tail-1]) <= dy(q[tail],q[tail-1]) * dx(i-1,q[tail])) tail--;//维护队尾,化除为乘
q[++tail] = i-1;//入队
while(head < tail && dy(q[head+1],q[head]) <= dx(q[head+1],q[head]) * 2 * sum[i]) head++;//排除过时点
int j = q[head];
f[i] = f[j] + (sum[i]-sum[j]) * (sum[i]-sum[j]) + m;//进行转移
}
cout << f[n];
return 0;
}
这样下来,每个点最多入队出队一次,时间复杂度 \(\mathcal O(n)\)。
时隔一年再做一次。
感觉这个题的重点不在斜率优化,而在于费用提前计算的思想。
朴素的 DP 是设 \(f_{i,j}\) 表示前 \(i\) 个机器分成 \(j\) 批的最小费用。然后发现这个转移是 \(\mathcal O(n^3)\) 的,因为这个 \(j\) 其实上界是 \(n\)。你会发现第二维存在的意义就是让我知道前面分了几个批次,因为 \(s\) 的存在,知道了几个批次才能知道现在的时间。然后就有了我们的费用提前计算的思想。
思考,我们新开一个批次,那么它会对这个批次及以后,一直到最后的机器产生 \(s \times c_i\) 的费用,而对前面的批次没有影响。那我们就可以把这个费用从 DP 状态中提出来,给个前缀和 \(sumC_i\) 和 \(sumT_i\),那么从 \(i+1\) 这台机器新开一个批次的贡献是 \(s \times (sumC_n -sumC_i)\),那么其余的部分就不需要考虑开了几台机器了,于是我们就只需要设 \(f_i\) 表示考虑到前 \(i\) 个机器的最小费用,那么就有:
这样就是 \(\mathcal O(n^2)\) 的了。
然后就是拆项斜率优化,最后变成
然后就跟上个题差不多了,但是有一个地方不同。
这个题的斜率是 \(sumT_i\),你会发现这个题 \(|T_i| \leq 2^8\),也就是完成一个机器的时间可以为负??所以就不能维护一个单调队列的队头了,查询的时候用二分 \(\mathcal O(\log n)\) 查询即可,总时间 \(\mathcal O(n\log n)\)。
il int um_nik(int l,int r,int k)
{
if(l == r) return q[l];
int ans = 0;
while(l <= r)
{
int mid = (l+r) >> 1;
if(dy(q[mid+1],q[mid]) <= k * dx(q[mid+1],q[mid])) l = mid + 1;
else ans = mid , r = mid-1;
}
return q[ans];
}
for(re int i=1;i<=n;i++)
{
while(head < tail && dy(i-1,q[tail]) * dx(q[tail],q[tail-1]) <= dy(q[tail],q[tail-1]) * dx(i-1,q[tail])) tail--;
q[++tail] = i-1;
int j = um_nik(head,tail,k(i));
f[i] = f[j] + s * (sumc[n]-sumc[j]) + sumt[i] * (sumc[i]-sumc[j]);
}
斜率优化的习题还有
总结
在斜率优化中,我们重点讨论了多项式 \(val(i,j)\) 包含 \(i,j\) 的乘积项的时候,我们该怎么采取优化:把 \(i\) 当作常量,\(j\) 当作变量,运用单调队列维护下凸壳的方式,维护决策集合。在这之中,\(x\) 是单调递增的,而对于 \(k\) 是否单调,我们分成了两种解法:
-
若 \(k\) 单调,就可以维护队头,把过时点删去;
-
若 \(k\) 不单调,说明队头是不能删掉的,我们仅在队尾维护凸壳,查询的时候 \(\mathcal O(\log n)\) 查询即可。
若 \(x\) 不是单调递增的,又有两种方法
-
若 \(k\) 是单调递增的,那么我们可以倒序 DP,设计出一个方程,让 \(k\) 在这个方程里变成 \(x\),\(x\) 在这个方程里变成 \(k\),于是就转化成了上面的第二种情况,单调队列+二分维护即可。
-
若 \(k\) 也不是单调的,这就意味着我们要在凸壳的任意位置动态插入顶点,动态查询。这时候就要用平衡树来维护凸壳了,这超出了我们的讨论范围,也超出了我的能力范围/cy。
总之,斜率优化的板子较为固定,运用一个函数来表示 \(x,y\) 的话,几乎每个题中变动的就只有这个函数里的取值,所以还是比较容易练的。
决策单调性-分治(1D/2D)
四边形不等式
这东西太扯了。
首先给出定义,设 \(w(x,y)\) 是定义在整数集合上的二元函数,对于定义域上的任意整数 \(a\leq b \leq c \leq d\),都有
成立,则称 \(w\) 满足四边形不等式,简单来说,就是包含和 \(\ge\) 交叉和,他还有另一种形式,对于 \(i<j\),都有
这两种可以互相推出,也是挺好推的。
在区间类(2D1D)动态规划中的应用
在区间类动态规划中,我们会遇到这样的柿子:
注意,只能是 \(\min\),因为这个式子是 2D1D,所以复杂度是 \(O(n^3)\) 的,若 \(w(l,r)\) 满足两个性质,我们就可以利用决策单调性来优化:
-
区间包含单调性:包含包含,就是让你证明 \(w(i,j+1) \ge w(i+1,j)\) 恒成立。
-
四边形不等式:若对于任意 \(a\leq b \leq c \leq d\),都有 \(w(a,d) + w(b,c) \ge w(a,c) + w(b,d)\),则称 \(w\) 满足四边形不等式,当然从另一个形式推也是可以的。
然后有一个引理:
若 \(w(l,r)\) 满足区间包含单调性和四边形不等式,则状态 \(f(l,r)\) 满足四边形不等式。
证明我都略了,感兴趣的可以到 OI-Wiki 上看。
然后又有一个定理,我们设 \(p(l,r)\) 表示 \([l,r]\) 区间内的最优决策点,那么有:
若状态 \(f\) 满足四边形不等式,则有 \(p(l,r-1) \leq p(l,r) \leq p(l+1,r)\)。
也就是说最优决策点具有一定单调性。我们可以发现类似于区间 DP 中,当我们找 \((l,r)\) 的最优决策点时,显然 \((l,r-1),(l+1,r)\) 的最优决策点我们已经找好了,那我们于是就可以缩小枚举范围,只枚举这两个点之间的点即可,然后可以证明,这样的复杂度就由 \(O(n^3)\) 缩减到了 \(O(n^2)\)。
上面这一串说明什么,说明我们只要证明了 \(w\) 的性质,我们便可以减少枚举量,降低复杂度。但是有可能 \(w\) 的性质很难证明,怎么办?打表,如果打了很多次都满足这两个条件,那么说明这个 \(w\) 很有可能满足这个性质,我们就可以用决策单调性来优化了。
在 1D1D 动态规划中的应用
四边形不等式的性质还适用于以下这种 1D1D 的方程:
其中有一个定理:
若 \(w(l,r)\) 满足四边形不等式,则对于任意 \(r_1 \leq r_2\),都有 \(p_{r_1}\leq p_{r_2}\)
这种对于上界不确定的决策单调性,我们一般采用分治算法来进行求解。设 \(f(tl,tr,l,r)\) 表示我们要求解 \(f(l) \sim f(r)\) 的答案,并且决策集合是 \([tl,tr]\),我们每次暴力找 \(\text{mid}\) 的最优决策点,然后分治成两部分,\(f(tl,mid,l,mid-1)\) 和 \(f(mid,tr,mid+1,r)\),可以证明,这样分治下去,时间复杂度是 \(O(n\log n)\)。
算法流程
这个其实和上面 1D1D 的类似。一般用来解决 2D1D 的 DP 问题。它适用的情况是只有上一层向下一层转移,同层之间不能转移,就类似于 01 背包,而不是完全背包。
一般的状态转移方程是这样的:
也有可能是 \(w(k,i)\),或者说 \(i,j\) 顺序是反过来的,不过本质是一样的,我们只需要找到那个上层转移到下层的一维,并对另一维进行分治即可。
思路是类似的,对于每一层,设当前层是 \(j\),那么 \(f(tl,tr,l,r)\) 表示我们要求解 \(f(l,j) \sim f(r,j)\) 的答案,并且决策集合是 \([tl,tr]\),我们每次暴力找 \(\text{mid}\) 的最优决策点(这个我们可以用另一个数组 \(g\) 存上一层的状态,然后进行转移),然后分治成两部分,\(f(tl,mid,l,mid-1)\) 和 \(f(mid,tr,mid+1,r)\),可以证明,这样分治下去,时间复杂度是 \(O(n\log n)\),并且因为我们一定要转移 \(k\) 层,所以是总复杂度就是 \(O(nk\log n)\),空间复杂度 \(O(n)\)。大致代码长这样(以 \(\max\) 为例,\(\min\) 可以自己替换一下):
il void Divide(int tl,int tr,int l,int r)
{
int mid = (l+r) >> 1;
int Max = -1 , pos = -1;
for(re int i=tl;i<=min(mid-1,tr);i++)
{
if(g[i] + w(i+1,mid) > Max)
Max = g[i] + w(i+1,mid) , pos = i;
}
f[mid] = max(f[mid],Max);
if(l < mid) Divide(tl,pos,l,mid-1);
if(r > mid) Divide(pos,tr,mid+1,r);
}
技巧:贡献难算
如果 \(w\) 不能在 \(O(1)\) 的时间内计算出来或者说预处理的时间复杂度过高难以接受,但是如果 \(l \sim r\) 的贡献能够在 \(O(v)\) 的时间内拓展到 \((l\pm 1)\sim (r\pm 1)\),那么决策单调性分治依然可以在 \(O(nv\log n)\) 的复杂度内求出每一层的状态。可以类比莫队的移动方式,维护当前贡献区间的左右端点 \(l,r\),如果要查询某个区间的贡献,直接左右端点跳到该区间。
以 CF833B The Bakery 为例,这个题转移方程也是很好求的,然后决策单调性也可以感性理解,就是分的段越长越有可能不优。但是这个题的 \(w\) 是求 \([l,r]\) 内不同数的个数,不是很好求,但是我们可以用类似莫队的方式来 \(O(1)\) 移动,那么每转移一层的复杂度就还是 \(O(n\log n)\),总共转移 \(k\) 层,那么就是 \(O(nk\log n)\)。
决策单调性-二分队列(1D)
二分队列常用来优化具有决策单调性的 DP 问题,且这里的决策单调性指的是对于 \(i\) 和 \(j\) 的最优决策点 \(p_i,p_j\),若 \(i < j\),那么 \(p_i\leq p_j\) 一定成立。要求转移时的贡献能够快速计算,一般是 \(O(1)\)
通常情况的限制是:贡献函数二阶导恒为非负,求最小值 或 二阶导恒为非正,求最大值。用人话说,就是对于一个 凹函数,求最小值 或 凸函数,求最大值。比如 \(y=x^2\) 这个函数就是凹函数,而 \(y=-x^2\) 这个函数就是凸函数,可以对照图像自己理解“凹凸”的意义。
具体地,建立一个存储三元组 \((pos,l,r)\) 的队列,表示 $l\sim r $ 的最优决策点是 \(pos\)。每次判断队首三元组是否过时,也就是是否 \(r < i\),如果是,弹出队首;否则将 \(l\) 赋值为 \(i\)。
加入决策时,如果 \(i\) 相比队尾的 \(j = q[tail].pos\) 转移到 \(q[tail].l\) 更优秀,那么根据决策单调性,我们可知 \(i\) 转移到 \(q[tail].l \sim n\) 比 \(j\) 更优,因此
\((pos,l,r)\) 就完全没用了,弹出。重复这个操作直到不满足条件或者队列只剩下一个三元组。
接下来我们取出队尾的三元组 \((pos,l,r)\),我们要找到一个位置 \(p\),使得 \(p\) 以前的位置,从 \(pos\) 转移更优;而 \(p\) 及 \(p\) 以后的位置,从 \(i\) 转移更优。因为这个贡献是可以快速计算出来的,而又满足决策单调性,所以我们可以二分出来,注意二分的位置是 \(l\) 到 \(r+1\),如果 \(p\leq n\),那么我们将 \((i,p,n)\) 压入队列,然后把原队尾三元组的 \(r\) 改为 \(p-1\)。
可以看出,整个算法的复杂度是 \(O(n\log n)\) 的。
#include<bits/stdc++.h>
#define double long double
#define ll long long
#define next nxt
#define re register
#define il inline
const int N = 1e5 + 5;
using namespace std;
int max(int x,int y){return x > y ? x : y;}
int min(int x,int y){return x < y ? x : y;}
int T,n,L,P;
int head,tail;
int sum[N],cha[N],stk[N];
double f[N];
char ch[N][35];
struct node{
int pos,l,r;
}q[N];
il int read()
{
int f=0,s=0;
char ch=getchar();
for(;!isdigit(ch);ch=getchar()) f |= (ch=='-');
for(; isdigit(ch);ch=getchar()) s = (s<<1) + (s<<3) + (ch^48);
return f ? -s : s;
}
il double ksm(double a,int b)
{
double res = 1;
while(b)
{
if(b&1) res = res * a;
a = a * a;
b >>= 1;
}
return res;
}
il double Calc(int i,int j) { return f[j] + ksm(fabs(sum[i]-sum[j]-L),P); }
il int um_nik(int x,int y,int l,int r)
{
int ans = 0;
while(l < r)
{
int mid = (l+r) >> 1;
if(Calc(mid,x) >= Calc(mid,y)) r = mid;
else ans = mid + 1 , l = mid + 1;
}
return ans;
}
il void Main()
{
n = read() , L = read() + 1 , P = read();
for(re int i=1;i<=n;i++)
{
cin >> ch[i];
sum[i] = sum[i-1] + strlen(ch[i]);
}
for(re int i=1;i<=n;i++) sum[i] += i;
q[1] = {0,1,n} , head = 1 , tail = 1;
for(re int i=1;i<=n;i++)
{
while(head < tail && q[head].r < i) head++;//判断是否过时
q[head].l = i;
f[i] = Calc(i,q[head].pos) , stk[i] = q[head].pos;
while(head < tail && Calc(q[tail].l,i) <= Calc(q[tail].l,q[tail].pos)) tail--;//判断谁转移到l更优
int pos = um_nik(q[tail].pos,i,q[tail].l,q[tail].r+1);//找到位置 p
if(pos <= n) q[tail].r = pos-1 , q[++tail] = {i,pos,n};//压入队列
}
if(f[n] > 1e18) puts("Too hard to arrange");
else
{
printf("%.0Lf\n",f[n]);
int i;
for(q[tail=0].pos=i=n;i;q[++tail].pos=i=stk[i]);
for(;tail;--tail)
{
for(i=q[tail].pos+1;i<q[tail-1].pos;++i)
printf("%s ",ch[i]);
puts(ch[i]);
}
}
puts("--------------------");
}
signed main()
{
T = read();
while(T--) Main();
return 0;
}
决策单调性-二分栈(1D)
二分栈常用来优化具有以下决策单调性的 DP 问题中:每个决策点 \(j\) 只会被它更前的决策点 \(i(i<j)\) 反超。记 \(w(i)\) 为从决策点 \(i\) 转移到当前位置的贡献。
但其实这个不是严格的决策单调性,但只要满足这个条件即可。
通常情况的限制是:贡献函数二阶导恒为非负,求最大值 或 二阶导恒为非正,求最小值。用人话说,就是对于一个 凹函数,求最大值 或 凸函数,求最小值,这个可以和二分队列对比一下。
我们用一个栈维护可能的决策点,那么栈顶储存的就是当前位置的决策点。我们考虑如何更新它:一个很朴素的想法是如果栈顶劣于次栈顶就弹出。但这样其实是不完善的,举个反例:如果存在 \(i<j<k\) 满足 \(k\) 优于 \(j\) 但 劣于 \(i\),那么这个算法会从 \(k\) 转移而不是正确的从 \(i\) 转移过来。但是我们有补救的机会:如果 \(i\) 反超 \(j\) 的时间在 \(j\) 反超 \(k\) 的时间之前,那么说明在 \(i\) 反超 \(j\) 的时候,\(j\) 还没反超 \(k\),这就说明 \(j\) 永远不会成为最优决策,此时我们就可以弹出 \(j\) 了。因此,我们可以在 加入决策 \(k\) 之前二分出 \(j\) 反超 \(k\) 的时间 \(t_1\) 和 \(i\) 反超 \(j\) 的时间 \(t_2\),如果 \(t_1 \ge t_2\),那么弹出 \(j\)。重复上述操作直到栈内只剩一个元素或 \(t_1 < t_2\),然后压入 \(k\)。
这样操作完了以后,不要忘记每次转移前要执行我们那个朴素的想法,即二分出次栈顶反超栈顶的时间 \(t\),如果不大于当前时间 \(i\),那么弹出栈顶。
因为有次栈顶这个东西存在,所以我们可以用 vector 来代替 stack。
非常好题目,爱来自瓷器。
这个题的朴素 DP 很难做,因为你每次得对一个区间的 \(s_0t^2\) 进行比较。但是有一个很好证明但不好想到的性质,就是 \(f\) 只会在相同颜色转移。所以可以给每个颜色开个栈,维护决策集合。
因为 \(s_0t^2\) 二阶导恒大于 \(0\),又是求最大值,所以我们采用二分栈。
#include<bits/stdc++.h>
#define int long long
#define ll long long
#define next nxt
#define re register
#define il inline
#define tp st[c][st[c].size()-1]
#define se st[c][st[c].size()-2]
const int N = 1e5 + 5;
using namespace std;
int max(int x,int y){return x > y ? x : y;}
int min(int x,int y){return x < y ? x : y;}
int n;
int f[N],s[N],buc[N],p[N];
vector <int> st[N];
il int read()
{
int f=0,s=0;
char ch=getchar();
for(;!isdigit(ch);ch=getchar()) f |= (ch=='-');
for(; isdigit(ch);ch=getchar()) s = (s<<1) + (s<<3) + (ch^48);
return f ? -s : s;
}
il int calc(int i,int cnt) { return f[i-1] + cnt * cnt * s[i]; }
il int um_nik(int x,int y)
{
int l = p[y] , r = buc[s[y]] + 1 , ans = 0;
while(l <= r)
{
int mid = (l+r) >> 1;
if(calc(x,mid-p[x]+1) < calc(y,mid-p[y]+1)) ans = mid + 1 , l = mid + 1;
else r = mid - 1;//找到 x 优于 y 的第一个时间点
}
return ans;
}
signed main()
{
n = read();
for(re int i=1;i<=n;i++) s[i] = read() , p[i] = ++buc[s[i]];
for(re int i=1;i<=n;i++)
{
int c = s[i];
while(st[c].size() > 1 && um_nik(se,tp) <= um_nik(tp,i)) st[c].pop_back();
st[c].push_back(i);
while(st[c].size() > 1 && um_nik(se,tp) <= p[i]) st[c].pop_back();
f[i] = calc(tp,p[i]-p[tp]+1);
}
cout << f[n];
return 0;
}

