

HDLbits day9
4、More Circuits
4.1、Rule 90
规则 90是一个具有有趣特性的一维元胞自动机。
规则很简单。有一个一维的单元格数组(开或关)。在每个时间步,每个单元的下一个状态是单元的两个当前邻居的 XOR。下表是表达此规则的更详细的方式,其中单元格的下一个状态是其自身及其两个邻居的函数:
| Left | Center | Right | Center's next state |
|---|---|---|---|
| 1 | 1 | 1 | 0 |
| 1 | 1 | 0 | 1 |
| 1 | 0 | 1 | 0 |
| 1 | 0 | 0 | 1 |
| 0 | 1 | 1 | 1 |
| 0 | 1 | 0 | 0 |
| 0 | 0 | 1 | 1 |
| 0 | 0 | 0 | 0 |
(“规则 90”的名称来自阅读“下一个状态”列:01011010 是十进制的 90。)
在此电路中,创建一个 512 单元系统 ( q[511:0] ),并在每个时钟周期前进一个时间步长。加载输入指示系统的状态应加载data[511:0]。假设边界(q[-1]和q[512])都为零(关闭)。

module top_module( input clk, input load, input [511:0] data, output [511:0] q ); //center的下一个状态是center的左右两个变量异或而得 always@(posedge clk) begin if(load) q<=data; else q<={1'b0,q[511:1]}^{q[510:0],1'b0}; end endmodule
4.2、Rule 110
规则 110是一个具有有趣特性(例如图灵完备)的一维元胞自动机。
有一个一维的单元格数组(开或关)。在每个时间步,每个单元格的状态都会发生变化。在规则 110 中,每个单元格的下一个状态仅取决于它自己和它的两个邻居,如下表所示:
| Left | Center | Right | Center's next state |
|---|---|---|---|
| 1 | 1 | 1 | 0 |
| 1 | 1 | 0 | 1 |
| 1 | 0 | 1 | 1 |
| 1 | 0 | 0 | 0 |
| 0 | 1 | 1 | 1 |
| 0 | 1 | 0 | 1 |
| 0 | 0 | 1 | 1 |
| 0 | 0 | 0 | 0 |
在此电路中,创建一个 512 单元系统 ( q[511:0] ),并在每个时钟周期前进一个时间步长。加载输入指示系统的状态应加载data[511:0]。假设边界(q[-1]和q[512])都为零(关闭)。(“规则 110”的名称来自阅读“下一个状态”列:01101110 是十进制的 110。)
module top_module( input clk, input load, input [511:0] data, output [511:0] q ); wire [511:0] L={1'b0,q[511:1]}; wire [511:0] R={q[510:0],1'b0}; //wire [511:0] R,L; //assign L={1'b0,q[511:1]}; //assign R={q[510:0],1'b0}; always@(posedge clk) begin if(load) q<=data; else q<=(q&~R)|(~L&R)|(~q&R);//有真值表化简所得公式 end endmodule
4.3、Conway's Game of Life 16x16
康威的生命游戏是一个二维元胞自动机。
“游戏”是在一个二维单元格上进行的,其中每个单元格要么是 1(活着),要么是 0(死去)。在每个时间步,每个单元格都会根据它拥有的邻居数量来改变状态:
- 0-1 邻居:单元格变为 0。
- 2个邻居:小区状态不变。
- 3 个邻居:单元格变为 1。
- 4 个以上的邻居:单元格变为 0。
该游戏是为无限网格制定的。在这个电路中,我们将使用 16x16 网格。为了让事情更有趣,我们将使用一个 16x16 的环形,其中边环绕到网格的另一边。例如,角单元 (0,0) 有 8 个邻居:(15,1) , (15,0) , (15,15) , (0,1) , (0,15) , (1,1)、(1,0)和(1,15)。16x16 的网格由一个长度为 256 的向量表示,其中每行 16 个单元格由一个子向量表示:q[15:0] 为第 0 行,q[31:16] 为第 1 行,以此类推(此工具接受 SystemVerilog,因此您可以根据需要使用 2D 向量。)
- load:在下一个时钟沿将数据加载到q中,用于加载初始状态。
- q:游戏的 16x16 当前状态,每个时钟周期更新。
游戏状态应该在每个时钟周期前进一个时间步长。
module top_module( input clk, input load, input [255:0] data, output [255:0] q ); reg [15:0] q_2d [15:0]; reg [15:0] q_next [15:0]; reg [3:0] sum; integer i,j; //把一维输入的数据转换为二维数据 always@(posedge clk) begin if(load) begin for(i=0;i<=15;i=i+1) for(j=0;j<=15;j=j+1) begin q_2d[i][j]<=data[i*16+j]; end end else q_2d<=q_next; end always@(*) begin for(i=0;i<=15;i=i+1) for(j=0;j<=15;j=j+1) begin if(i==0 && j==0)//左上角 sum=q_2d[15][1]+q_2d[15][0]+q_2d[15][15]+q_2d[0][1]+q_2d[0][15]+q_2d[1][0]+q_2d[1][1]+q_2d[1][15]; else if(i==0 && j==15)//右上角 sum=q_2d[0][0]+q_2d[0][14]+q_2d[15][0]+q_2d[15][14]+q_2d[15][15]+q_2d[1][0]+q_2d[1][14]+q_2d[1][15]; else if(i==15 && j==0)//左下角 sum=q_2d[15][1]+q_2d[15][15]+q_2d[14][0]+q_2d[14][15]+q_2d[14][1]+q_2d[0][0]+q_2d[0][1]+q_2d[0][15]; else if(i==15 && j==15)//右下角 sum=q_2d[15][0]+q_2d[15][14]+q_2d[14][15]+q_2d[14][0]+q_2d[14][14]+q_2d[0][0]+q_2d[0][15]+q_2d[0][14]; else if(i==0)//上边界 sum=q_2d[0][j-1]+q_2d[0][j+1]+q_2d[1][j-1]+q_2d[1][j]+q_2d[1][j+1]+q_2d[15][j-1]+q_2d[15][j]+q_2d[15][j+1]; else if(i==15)//下边界 sum=q_2d[15][j-1]+q_2d[15][j+1]+q_2d[0][j-1]+q_2d[0][j]+q_2d[0][j+1]+q_2d[14][j-1]+q_2d[14][j]+q_2d[14][j+1]; else if(j==0)//左边界 sum=q_2d[i][1]+q_2d[i][15]+q_2d[i-1][0]+q_2d[i-1][15]+q_2d[i-1][1]+q_2d[i+1][0]+q_2d[i+1][1]+q_2d[i+1][15]; else if(j==15)//右边界 sum=q_2d[i][0]+q_2d[i][14]+q_2d[i-1][0]+q_2d[i-1][14]+q_2d[i-1][15]+q_2d[i+1][0]+q_2d[i+1][14]+q_2d[i+1][15]; else //中间元素 sum=q_2d[i-1][j]+q_2d[i-1][j-1]+q_2d[i-1][j+1]+q_2d[i][j-1]+q_2d[i][j+1]+q_2d[i+1][j]+q_2d[i+1][j-1]+q_2d[i+1][j+1]; case(sum) 4'd2:q_next[i][j]=q_2d[i][j]; 4'd3:q_next[i][j]=1'b1; default:q_next[i][j]=1'b0; endcase end end //把二维数组转成一维数组输出 genvar m,n; generate for(m=0;m<=15;m=m+1) begin:hang for(n=0;n<=15;n=n+1) begin:lie assign q[m*16+n]=q_2d[m][n]; end end endgenerate endmodule
5、Finite State Machines
5.1、Simple FSM 1(asynchronous reset)
这是一个具有两种状态的摩尔状态机,一种输入和一种输出。实现这个状态机。请注意,重置状态为 B。
本练习与fsm1s相同,但使用异步复位。

module top_module( input clk, input areset, // Asynchronous reset to state B input in, output out);// parameter A=0, B=1; reg state, next_state; always @(*) begin // This is a combinational always block // State transition logic case(state) A:begin if(in==1'b1) next_state<=A; else next_state<=B; end B:begin if(in==1'b1) next_state<=B; else next_state<=A; end endcase end always @(posedge clk, posedge areset) begin // This is a sequential always block // State flip-flops with asynchronous reset if(areset) state<=B; else state<=next_state; end // Output logic // assign out = (state == ...); assign out=(state==B); endmodule
5.2、Simple FSM1(Synchronous reset)
这是一个具有两种状态的摩尔状态机,一种输入和一种输出。实现这个状态机。请注意,重置状态为 B。
本练习与fsm1相同,但使用同步复位。

一开始报错,原因如下:
第一、题目给出的else位置有问题;
第二、在同一个always语句块中编写所有的逻辑,这里必须使用延迟赋值语句,保证上一个逻辑完成以后再进行下一个逻辑
// Note the Verilog-1995 module declaration syntax here: module top_module(clk, reset, in, out); input clk; input reset; // Synchronous reset to state B input in; output out;// reg out; // Fill in state name declarations parameter A=0,B=1; reg present_state, next_state; always @(posedge clk) begin if (reset) begin // Fill in reset logic next_state = B; end else begin case (present_state) // Fill in state transition logic A:begin if(in==1'b1) next_state=A; else next_state=B; end B:begin if(in==1'b1) next_state=B; else next_state=A; end endcase end // State flip-flops状态触发器,注意这里用的延迟赋值语句 present_state = next_state; case (present_state) // Fill in output logic A:out=1'b0; B:out=1'b1; endcase end endmodule
5.3、Simple FSM2(asynchronous reset)
这是一个具有两个状态、两个输入和一个输出的摩尔状态机。实现这个状态机。
这个练习和fsm2s一样,但使用异步复位。

module top_module( input clk, input areset, // Asynchronous reset to OFF input j, input k, output out); // parameter OFF=0, ON=1; reg state, next_state; always @(*) begin // State transition logic case(state) OFF:next_state<=(j==1'b1)?ON:OFF; ON: next_state<=(k==1'b1)?OFF:ON; endcase end always @(posedge clk, posedge areset) begin // State flip-flops with asynchronous reset if(areset) state<=OFF; else state<=next_state; end // Output logic // assign out = (state == ...); assign out=(state==OFF)?0:1; endmodule
5.4、Simple FSM2(Synchronous reset)
这是一个具有两个状态、两个输入和一个输出的摩尔状态机。实现这个状态机。
本练习与fsm2相同,但使用同步复位。

module top_module( input clk, input reset, // Synchronous reset to OFF input j, input k, output out); // parameter OFF=0, ON=1; reg state, next_state; always @(*) begin // State transition logic case(state) OFF:next_state<=(j==1'b1)?ON:OFF; ON: next_state<=(k==1'b1)?OFF:ON; endcase end always @(posedge clk) begin // State flip-flops with synchronous reset if(reset) state<=OFF; else state<=next_state; end // Output logic // assign out = (state == ...); assign out=(state==ON); endmodule
5.5、Simple state transition3
以下是一输入一输出四状态的摩尔状态机的状态转移表。使用以下状态编码:A=2'b00, B=2'b01, C=2'b10, D=2'b11。
仅实现此状态机的状态转换逻辑和输出逻辑(组合逻辑部分)。给定当前state ,计算next_state和输出
| State | Next state | Output | |
|---|---|---|---|
| in=0 | in=1 | ||
| A | A | B | 0 |
| B | C | B | 0 |
| C | A | D | 0 |
| D | C | B | 1 |
module top_module( input in, input [1:0] state, output [1:0] next_state, output out); // parameter A=0, B=1, C=2, D=3; // State transition logic: next_state = f(state, in) //always@(posedge clk) always@(*) begin case(state) A:next_state<=(in==1'b1)?B:A; B:next_state<=(in==1'b1)?B:C; C:next_state<=(in==1'b1)?D:A; D:next_state<=(in==1'b1)?B:C; endcase end // Output logic: out = f(state) for a Moore state machine always@(*) begin out<=(state==D); end endmodule
5.6、simple one-hot state transitions 3
以下是一输入一输出四状态的摩尔状态机的状态转移表。使用以下单热状态编码:A=4'b0001, B=4'b0010, C=4'b0100, D=4'b1000。
假设 one-hot 编码,通过检查导出状态转换和输出逻辑方程。仅实现此状态机的状态转换逻辑和输出逻辑(组合逻辑部分)。(测试台将使用非一个热输入进行测试,以确保您不会尝试做更复杂的事情)。
| State | Next state | Output | |
|---|---|---|---|
| in=0 | in=1 | ||
| A | A | B | 0 |
| B | C | B | 0 |
| C | A | D | 0 |
| D | C | B | 1 |
module top_module( input in, input [3:0] state, output [3:0] next_state, output out); // parameter A=0, B=1, C=2, D=3; // State transition logic: Derive an equation for each state flip-flop. assign next_state[A] = (state[A]&~in)|(state[C]&~in); assign next_state[B] = (state[A]&in)|(state[B]&in)|(state[D]&in); assign next_state[C] = (state[B]&~in)|(state[D]&~in); assign next_state[D] = (state[C]&in); // Output logic: assign out = (state[D]==1'b1); endmodule
5.7、Simple FSM3(asynchronous reset)
以下是一输入一输出四状态的摩尔状态机的状态转移表。实现这个状态机。包括将 FSM 重置为状态 A 的异步重置。
| State | Next state | Output | |
|---|---|---|---|
| in=0 | in=1 | ||
| A | A | B | 0 |
| B | C | B | 0 |
| C | A | D | 0 |
| D | C | B | 1 |
module top_module( input clk, input in, input areset, output out); // parameter A=0,B=1,C=2,D=3; reg[1:0] state,next_state; // State transition logic always@(*) begin case(state) A:next_state<=(in==1'b0)?A:B; B:next_state<=(in==1'b0)?C:B; C:next_state<=(in==1'b0)?A:D; D:next_state<=(in==1'b0)?C:B; endcase end // State flip-flops with asynchronous reset always@(posedge clk or posedge areset) begin if(areset) state<=A; else state<=next_state; end // Output logic always@(*) begin out<=(state==D); end endmodule
5.8、Fsm3s
以下是一输入一输出四状态的摩尔状态机的状态转移表。实现这个状态机。包括将 FSM 重置为状态 A 的同步重置。
| State | Next state | Output | |
|---|---|---|---|
| in=0 | in=1 | ||
| A | A | B | 0 |
| B | C | B | 0 |
| C | A | D | 0 |
| D | C | B | 1 |
module top_module( input clk, input in, input reset, output out); // parameter A=0,B=1,C=2,D=3; reg[1:0] state,next_state; // State transition logic always@(*) begin case(state) A:next_state<=(in==1'b0)?A:B; B:next_state<=(in==1'b0)?C:B; C:next_state<=(in==1'b0)?A:D; D:next_state<=(in==1'b0)?C:B; endcase end // State flip-flops with synchronous reset always@(posedge clk) begin if(reset) state<=A; else state<=next_state; end // Output logic assign out=(state==D); endmodule
5.9、Exams/ece241 2013 q4
大型水库可为多个用户提供服务。为了使水位足够高,三个传感器以5英寸的间隔垂直放置。当水位高于最高传感器(S3)时,输入流量应为零。当液位低于最低传感器(S1)时,流量应最大(标称流量阀和辅助流量阀均打开)。当水位在上下传感器之间时,流速由两个因素决定:水位和最后一个传感器变化之前的水位。每种水位都有一个与之相关的标称流速,如下表所示。如果传感器变化表明先前的液位低于当前的液位,则应进行标称流速。如果先前的水平高于当前水平,则应通过打开辅助流量阀(由ΔFR控制)来增加流量。
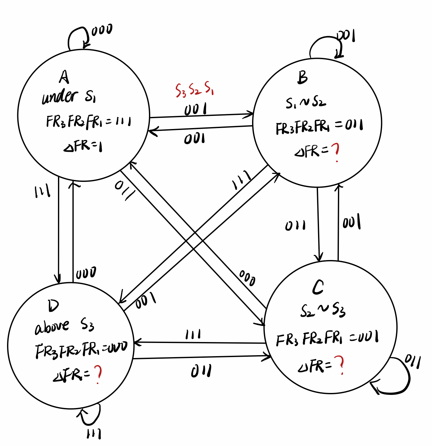
绘制水库控制器的摩尔模型状态图。清楚地指出每个状态的所有状态转换和输出。 FSM的输入为S1,S2和S3。输出为FR1,FR2,FR3和ΔFR。
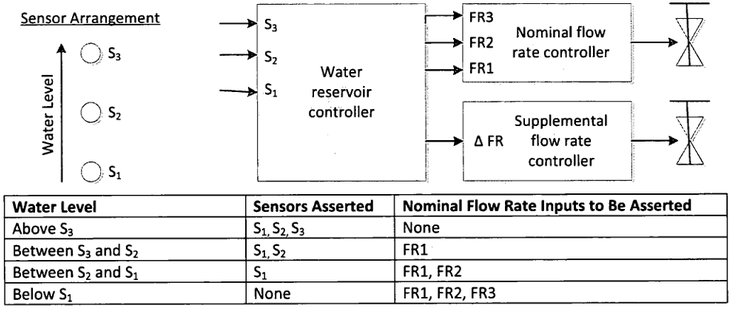
1)这是一个水位控制系统,S1,S2,S3是三个水位传感器。FR3,FR2,FR1为三个控制水流量的开关,开得越多流量越大。ΔFR是检测水位变化的标志。
2)设计一个状态机判断水位并根据水位选择流量开关
3)一共有四种状态,A表示水位在S1下面,FR1、FR2、FR3都为1;B表示水位在S1与S2之间,FR1、FR2都为1;C表示水位在S2与S3之间,FR1为1;D表示水位在S3以上,FR1、FR2、FR3都为0。
4)输入信号为S3S2S1,其中S1为1就表示水位在S1之上。然后如果之前的水阀数量比当前的多,那么ΔFR就是1;如果比现在的少,那么ΔFR就是0;如果水位保持不变,ΔFR也保持不变。由于最低状态只能比当前得多,所以ΔFR一直都会是1,就算是水位不变,也要保持ΔFR是1;同理最高水位一定是比之前的高,所以ΔFR一直是0。
5)官方答案采用了6种状态,加考虑了dfr的变化,代码更简单,6种状态转换图的描绘参考博文:
module top_module ( input clk, input reset, input [3:1] s, output fr3, output fr2, output fr1, output dfr ); parameter A=0,B=1,C=2,D=3; reg[1:0] state,next_state; reg store_dfr; reg[2:0] store_fr; assign store_fr={fr3,fr2,fr1}; assign store_dfr=dfr; always@(*) begin case(state) A:case(s) 3'b000:next_state<=A; 3'b001:next_state<=B; 3'b011:next_state<=C; 3'b111:next_state<=D; endcase B:case(s) 3'b000:next_state<=A; 3'b001:next_state<=B; 3'b011:next_state<=C; 3'b111:next_state<=D; endcase C:case(s) 3'b000:next_state<=A; 3'b001:next_state<=B; 3'b011:next_state<=C; 3'b111:next_state<=D; endcase D:case(s) 3'b000:next_state<=A; 3'b001:next_state<=B; 3'b011:next_state<=C; 3'b111:next_state<=D; endcase endcase end always@(posedge clk) begin if(reset) state<=A; else state<=next_state; end always@(posedge clk) begin if(reset) dfr<=1; else begin if(state>next_state) dfr<=1; else if(state<next_state) dfr<=0; else dfr<=dfr; end end always@(posedge clk) begin if(reset) {fr3,fr2,fr1}<=3'b111; else begin case(next_state) A:{fr3,fr2,fr1}<=3'b111; B:{fr3,fr2,fr1}<=3'b011; C:{fr3,fr2,fr1}<=3'b001; D:{fr3,fr2,fr1}<=3'b000; endcase end end endmodule


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· winform 绘制太阳,地球,月球 运作规律
· AI与.NET技术实操系列(五):向量存储与相似性搜索在 .NET 中的实现
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人
· 上周热点回顾(3.3-3.9)
· AI 智能体引爆开源社区「GitHub 热点速览」