
Bellman_Ford
updata 2025.8.24 添加了一些 hack,说明了一些错误思想
基本上用不到的算法,和高精度一样,不常用,用到了又无可代替
常用于限制边数的最短路算法。
使用范围
可以处理任意边权的图,可以判断负环。
时间复杂度 \(O(nm)\)。因为太慢了,在求最短路的时候基本用不到,但是它的优化版 SPFA 则大大优化了时间复杂度,算是最短路里最好用的算法,有很强的适应性。但近年来容易被卡。
中心思想
对每个点进行 \(n - 1\) 轮松弛。
每一轮会遍历所有边,一共 \(n - 1\) 轮,时间复杂度也就是 \(O(nm)\)。
正确性证明
第一种:第 \(1\) 轮松弛得到的是起点到其他点,最多经过 \(1\) 条边的最短路径;第 \(n\) 轮得到的就是从起点到其他点,最多经过 \(n\) 条边点的最短路径。因为在 \(n\) 个点中,两个点之间的最短路径最多有 \(n - 1\) 条边,即对每个点最多进行 \(n - 1\) 轮松弛可以得到最短距离。
如果超过 \(n-1\) 轮还有边可以被松弛,那么说明有源点 \(S\) 点能到达的负环。
第二种:如果最短路径经过了 \(n\) 条边,那么一定有 \(n + 1\) 个点,而点数一共 \(n\) 个,所以至少有一个点被重复经过了,也就是说最短路径出现了环。对于环如果是正环,我们完全可以省略;如果是 \(0\) 权环,那么不会引起最短路的松弛,依靠我们的算法,就不会经过这个环;如果是负环,因为可以减小权值所以可行。综上只可能是负权环,而我们求最短路一般是不考虑负权环的(因为它可以让边权无限减小),所以最多只能经过 \(n - 1\) 条边。
实操步骤
- 枚举每个点 \(u\)
- 枚举 \(u\) 连接着的边 \(w\) 和点 \(j\),并用和 \(dist[u]\) 和 \(w\) 更新 \(dist[j]\)
- 循环上面过程 \(n - 1\) 次
代码
代码和思想一样
但略有不同。
int bellman_ford(int S, int T)
{
memset(dist, 0x3f, sizeof dist);
dist[S] = 0;
int k = n;
while ( -- k)
{
memcpy(g, dist, sizeof dist);
for (int u = 1; u <= n; u ++ ) // 枚举每个点u
for (int i = h[u]; i != -1; i = ne[i]) // 用u对j进行松弛操作
{
int j = e[i];
dist[j] = min(dist[j], g[u] + w[i]);
}
}
return dist[T];
}
可以发现代码多了一个 \(g\) 数组,\(g\) 是 \(dist\) 的复制数组,如果只是求最短路的话可以不用 \(g\) 代替 \(dist\),但如果考虑限制经过 \(k\) 条边的话,必须加上。设当前为第\(k\)轮,那么 \(g\) 里面存的就是第 \(k - 1\) 轮的最短路,如果不这么做直接用 \(dist\) 更新,可能会出现连续更新的现象,即在这轮用刚更新完的 \(dist\) 去更新了其他点的 \(dist\),就可能会打破边数的限制,在第 \(k\) 轮有经过 \(k + x\) 条边的最短路径,导致算法错误。因此,有必要加上这个\(g\) 数组。
扩展(必看)
判断负环
据上面所说,我们最多 \(n-1\) 轮就能得出最短路径,也就说第 \(n\) 轮的时候不可能有边还能被松弛,如果有,则说明具有负环,可以无限松弛边长。这里还要注意一点,如果是发现第 \(n\) 轮没有边被松弛,不一定图上没有负环,可能只是源点 \(S\) 到不了而已,因此判断负环时应使用一个超级源点把所有点都连起来,边权为 \(0\) ,这样才能完美地找出负环。
第 \(k\) 轮的性质
当第 \(k\) 轮结束时,得到的边是在经过不超过 \(k\) 条边的下的最短路径,而一个点在第 \(k\) 轮被更新说明什么?能引起第 \(k\) 轮更新的点,只有第 \(k-1\) 轮被更新过的点才有可能,以此类推,可知第 \(k\) 轮被更新的点,更新的最短路径中必定包含 \(k\) 条边。这是一条很重要的性质。
下面给出更详细一点的例子(如果不懂的话):
在 Bellman_Ford 中,对与一个点 \(u\) 来说,第一轮松弛 \(u\) 可能会被松弛多次,但最短路经过的边数始终为 \(1\),而在第二轮时,如果 \(u\) 还能被松弛,则说明,这个松弛它的点是在上一轮松弛过得(即最短路经过一条边的点),那么此时 \(u\) 的最短路经过路径为 \(2\) 条。
以此类推,如果第三轮 \(u\) 能被松弛, 那么能松弛它的点 \(j\) 一定也是上一轮松弛过得(如果这个 \(j\) 不是上一轮松弛过的,而此轮能够松弛 \(u\),那么说明在上一轮它也可以松弛 \(u\),但却没进行松弛,这是矛盾的,说明 \(j\) 只能是上一轮松弛过的,这个证明可以移动至任何一轮),那么它的最短路经过的边数为 \(3\) 条。由此递推,在 Bellman_Ford 算法中,在第 \(k\) 轮被松弛的点,最短路经过的边一定为 \(k\) 条。
需要注意,在第 \(k\) 轮中,\(u\) 可能会被松弛超过 \(k\) 次(即在一轮中可能会被多个点松弛)。所以在 SPFA 或者 Bellman_Ford 中单论松弛次数是无意义的(注意不是松弛轮数)。如下图:
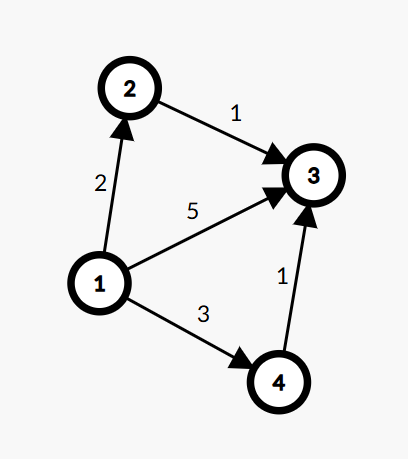
以 \(1\) 为源点,根据算法流程会第一轮先松弛 \(2,3,4\) 三个点,每个点此时都只松弛了一次,而在第二轮,如果 \(4\) 先松弛了 \(3\),而后 2 又松弛了 \(3\),此时在这轮,\(3\) 已经被松弛了两次,此时第 \(2\) 轮,但 \(3\) 却松弛了 \(3\) 次,最短路只经过两条边。可以看出,松弛次数和最短路经过边数并没有直接关系。
下面构造反例说明上面的正确(如果你已经懂了可以略过)。
如以下数据:
4 6
2 3 -1
3 4 3
2 4 4
1 3 1
1 4 10
1 2 1
构造如图:
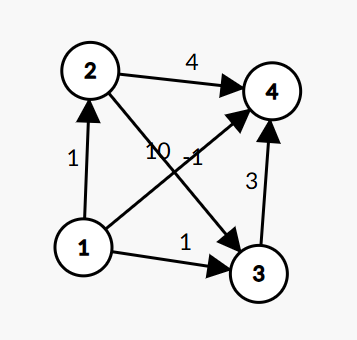
图中并无负环,但 \([1,4]\) 四个点的松弛次数却分别为:\(0,1,2,4\) 存在松弛此时等于 \(n\) 的情况,但是图中并没有负环。说明,松弛次数为 \(n\) 并不一定经过 \(n\) 条边(即不一定存在负环),Bellman_Ford 算法中每个点不一定最多松弛 \(n - 1\) 次。这也可以证明松弛次数和最短路边数没有直接关系。有关系的只有轮数。
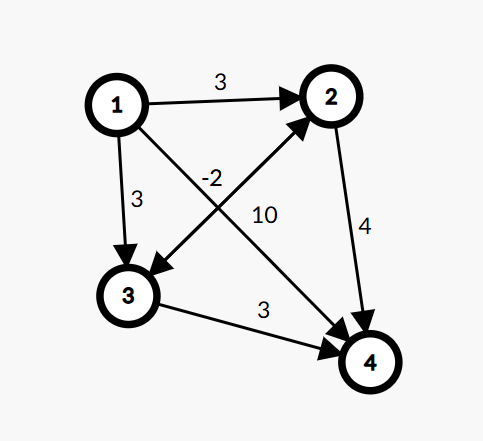
甚至说使用以下数据:
4 7
2 3 -2
3 2 -2
3 4 3
2 4 4
1 3 3
1 4 10
1 2 3
可以输出 0 3 3 5 这种数据,松弛次数甚至超过了 \(n\)(无负环),更可以说明不成立。
如图:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号