
数据结构——排序
排序
概述
分类
按存储介质分:
- 内部排序:数据量不大,数据在内存,无需内外存交换数据
- 外部排序:数据量较大,数据在外存(文件排序)
外部排序时,将数据分批调入内存,中间结果还要及时放入外存
按比较器个数
- 串行排序:单个处理机(同一时刻比较一对元素)
- 并行排序:多个处理器
按主要操作
- 比较排序:用比较的方法
插入排序,交换排序,选择排序,归并排序
- 基数排序:不比较元素的大小,仅仅根据元素本身的取值确定其有序位置
按辅助空间
- 原地排序:O(1),所占的辅助空间与参加排序的数据量大小无关
- 非原地
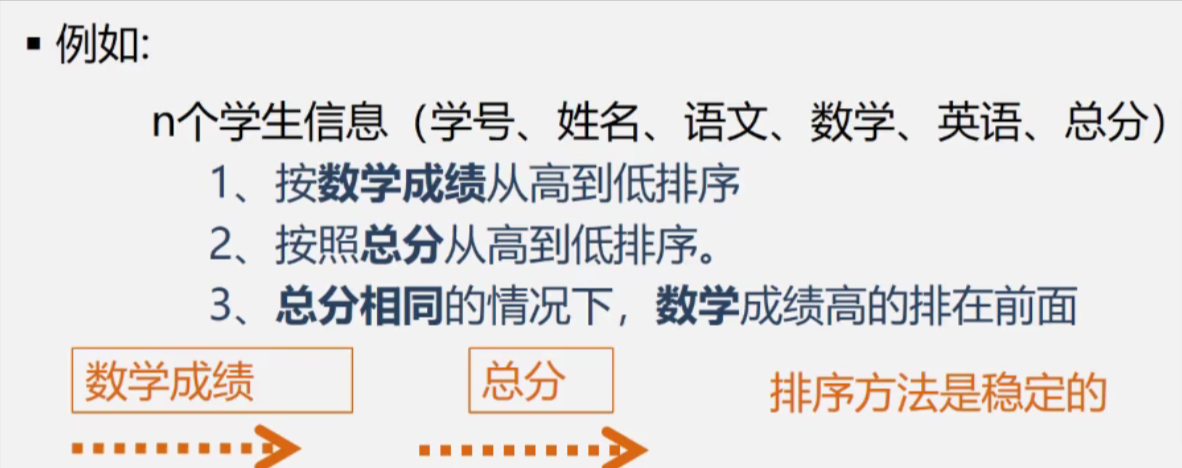
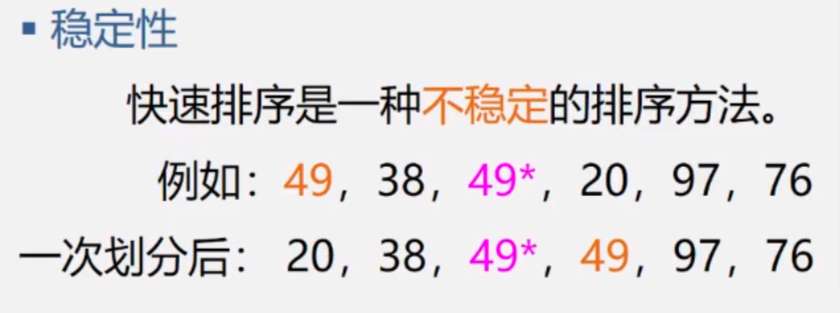
按稳定性:
- 稳定排序:能够使任何数值相等的元素,排序以后相对次序不变
- 非稳定排序

排序的稳定性只对
结构类型的数据排序有意义排序方法是否稳定,并不能衡量一个排序算法的优劣
例如
按自然性
-
自然排序:输入的数据越有序,排序的速度越快
-
非自然排序
# define MAXSIZE 20//设记录不超过20
typedef int KeyType;//设关键字类型为整型
typedef struct
{//定义每个记录的结构
KeyType key;
//其他数据项
}RedType//Record type
typedef struct
{//定义顺序表结构
RedType r[MAXSIZE + 1];//存储顺序表的向量,r[0]一般做哨兵或缓冲区
int length;
}SqList;
插入排序
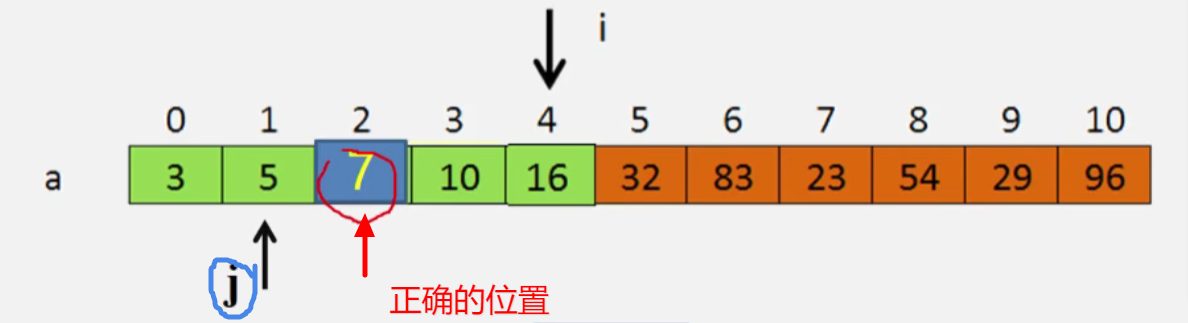
直接插入排序——顺序法定位插入位置
//复制插入元素到临时变量
x=a[i];
//前面的元素从后往前依次比较后按次序后移,查找插入位置(以从小到大举例)
for(j=i-1;j>=0&&x<a[j];j--)//一次循环比较两次
a[j+1]=a[j];
//插入到该位置
a[j+1]=x;
//使用哨兵,另外如果待排元素已经比末尾数大,不排,直接插入到末尾(添加if)
//待排元素复制为哨兵
L.r[0]=L.r[i];
//记录后移,查找插入位置
for(j=i-1;L.r[0].key<L.r[j].key;--j)
L.r[j+1]=L.r[j];
//插入到正确位置
L.r[j+1]=L.r[0];
算法
void InsertSort (SqList &L)
{
int i,j;
for(i=2;i<=L.length;i++)//从记录中第二个元素开始排
{
if(L.r[i].key<L.r[i-1].key)//左边末尾大了,执行插入排序
{
L.r[0]=L.r[i];
for(j=i-1;L.r[0].key<L.r[j].key;j--)
L.r[j+1]=L.r[j];//记录后移
L.r[j+1]=L.r[0];
}
}
}
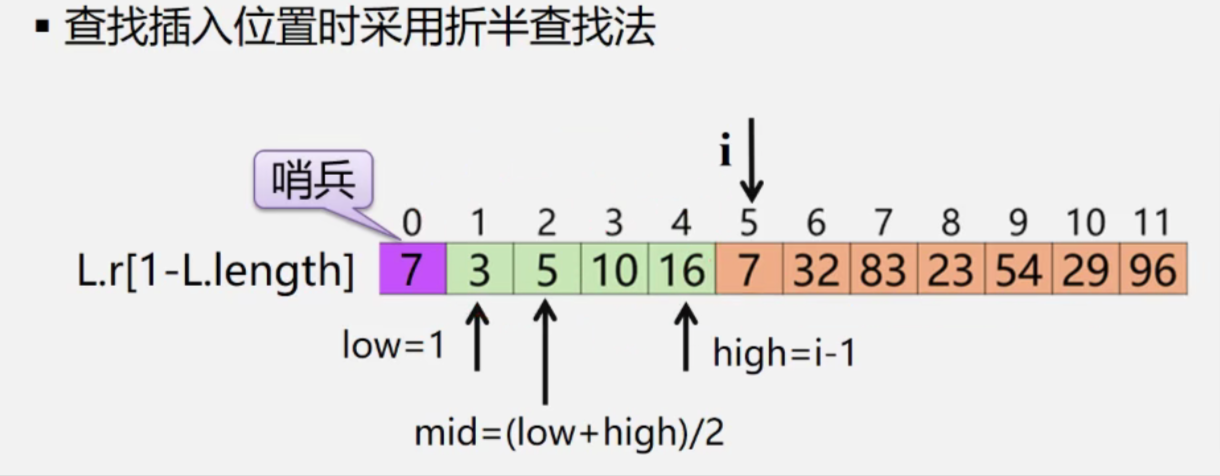
二分(折半)插入排序——前半区有序下二分法定位
算法
void BInsertSort(SqList &L)
{
for(i=2;i<=L.length;++i)//依次插入第2~第n个元素
{
L.r[0]=L.r[i];//当前插入元素存到“哨兵位置”
low=1;high=i-1
while(low<=high) //二分查找插入位置
{
mid=(low+high)/2;
if(L.r[0].key<L.r[mid].key) high =mid-1; //左半区继续
else low=mid+1;
}//循环结束high+1则为插入位置;
for(j=i-1;j>=high+1;--j) L.r[j+1]=L.r[j];//移动元素,空出high+1的位置
L.r[high+1]=L.r[0];//插入到正确位置
}
}//二分插入排序
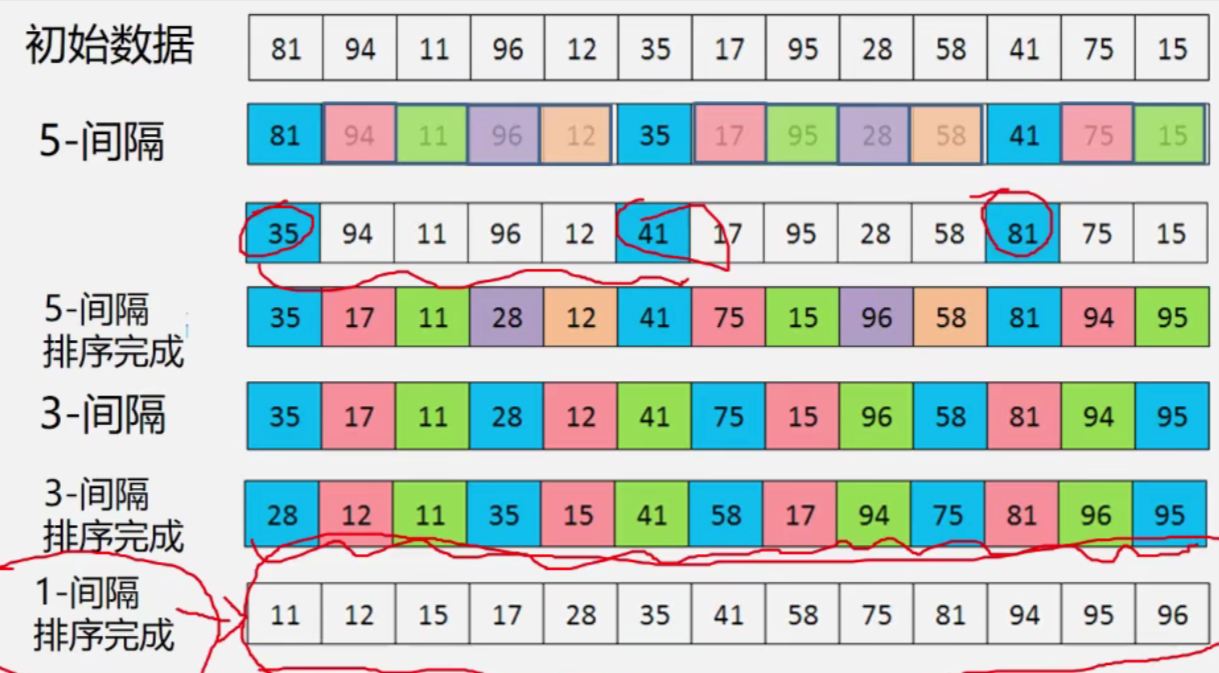
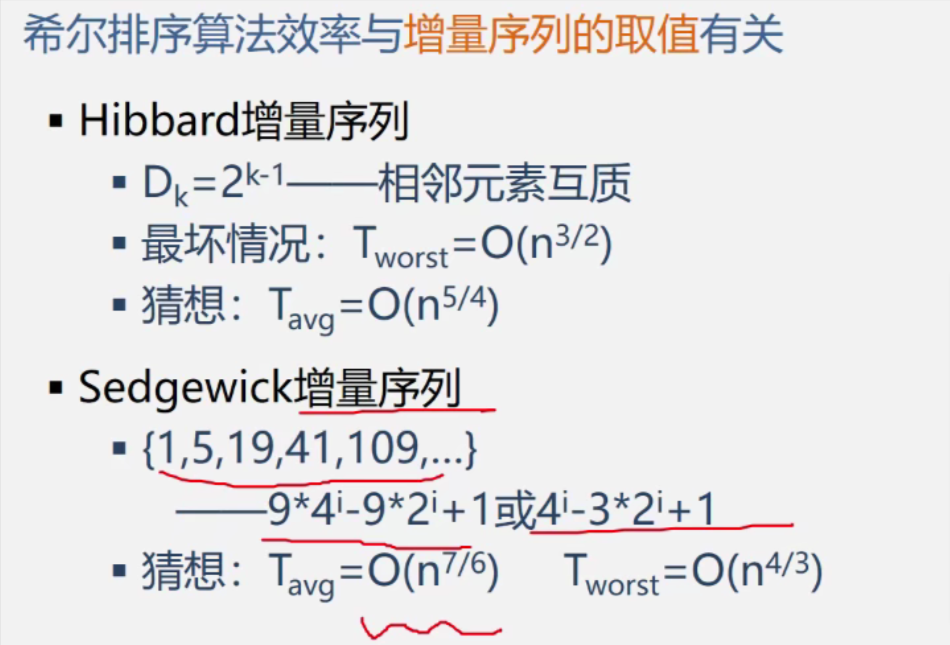
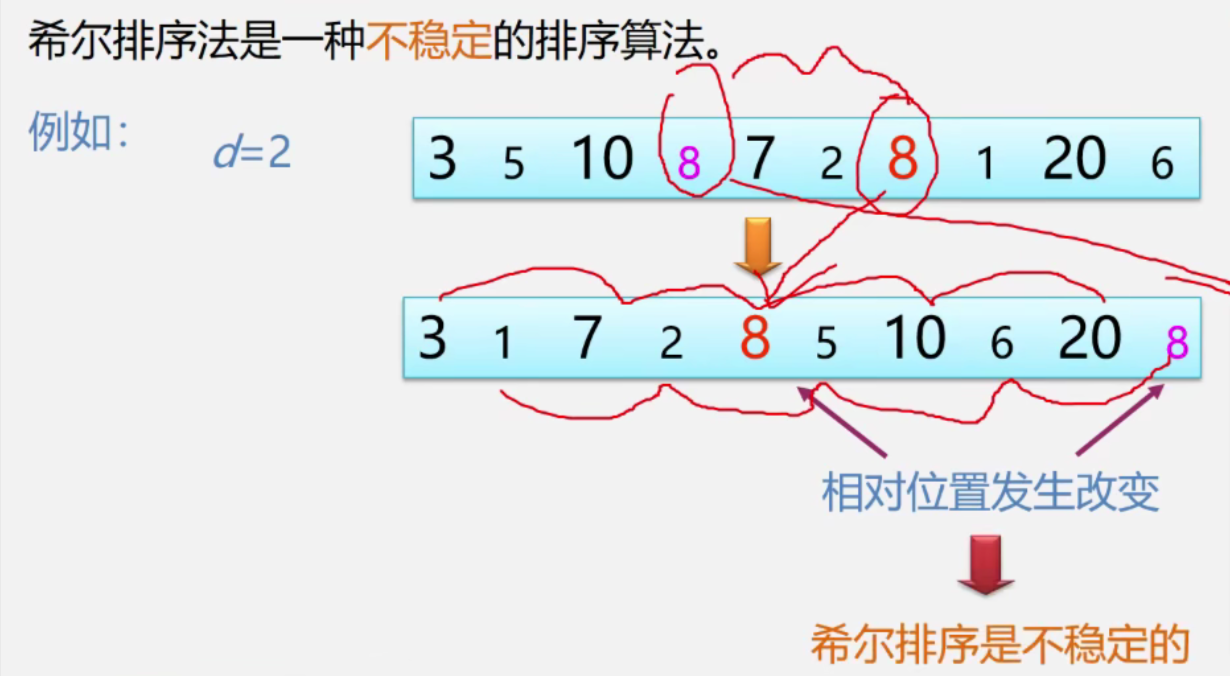
希尔排序——缩小增量多遍插入排序(不宜用在链式存储结构)
思路:
- 定义增量序列D(最后一个元素必为1,即进行直接插入排序)
- 比如D3=5,D2=3,D1=1(互质)
- 对每个Dk进行“Dk-间隔”插入排序(即以Dk为间隔的几个数取出来排序)
- 如此Dk递减进行排序得到最后结果
特点:
- 一次移动跳跃间隔大,接近排序后的最终位置
- 最后一次只需要少量移动
- 增量序列必须时递减的,最后一个必为1
- 增量序列应互质
算法
//按增量序列dlta[0..t-1]对顺序表L做希尔排序
void ShellSert(SqList&L,int dlta[],int t)
{
for(k=0;k<t;k++)
ShellSort(L,dlta[k]);//一趟增量为dlta[k]的插入排序,总共t趟
}
void ShellSert(SqList &L,int dk)
{
for(i=dk+1;i<=L.length;++i)
{
if(r[i].key<r[i-dk].key)
{
r[0]=r[i];
for(j=i-dk;j>0&&(r[0].key<r[j].key);j=j-dk)
r[j+dk]=r[j];
r[j+dk]=r[0];//其实是把之前的间隔1改为dk即可
}
}
}
交换排序
冒泡(气泡)排序
——基于简单交换思想
基本思想:每趟不断将记录两两比较,并按“前小后大”规则交换
n个记录元素,总共需要n-1趟
第m趟得到结果需要比较n-m次
算法
void bubble_sort(SqList &L)//冒泡排序算法
{
int m,n,i,j;
RedType x;//交换时的临时变量
for(m=1;m<=n-1;m++)//总共n-1趟
{
for(i=1;i<=n-m;i++)//每趟需要n-m次交换
{
if (L.r[j].key>L.r[j+1].key)//发生逆序
x=L.r[j];L.r[j]=L.r[j+1];L.r[j+1]=x;//交换
}
}//外层for
}
void bubble_sort(SqList &L)//提高效率,一旦某一趟 不发生 交换可以终止
{
int m,n,i,j;int flag=1;RedType x;//flag作为是否交换的标记
for(m=1;m=n-1&&flag==1;m++)
{
flag=0;//每趟初始标记置0
for(i=1;i=m-n;i++)
{
if(L.r[i].key>L.r[i+1].key)//交换就置1,本趟没发生过交换就会保持为0,外层循环条件也不会满足,终止
{
flag=1;
x=L.r[i];L.r[i]=L.r[i+1];L.r[i+1]=x;
}
}
}
}
快速排序
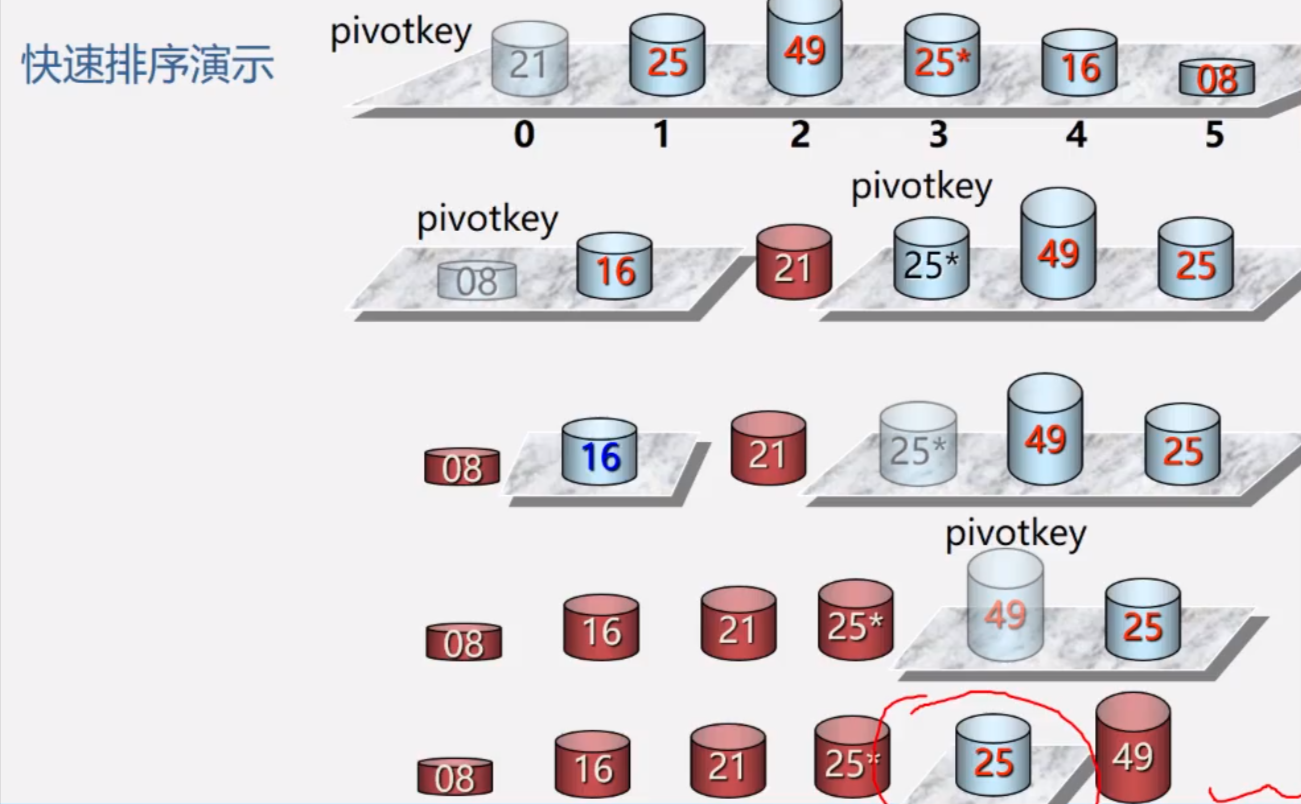
原理
实现:选定一个中间数(可以是第一个数,最后一个数,最中间的数,任选一个数)作为参考,所有元素与之比较,小的调到左边,大的调到右边
越乱越快,反倒不适合有序序列的排序。所以快排
不是自然排序方法
void main()
{
QSort(L,1,L.length);
}
void QSort(SqList &L,int low,int high)
{
if(low<high)//low,high未重合
{
center=Partiton(L,low,high);//找到排好序后中心元素该放的位置,将L一分为二,其中包含了交换操作
QSort(L,low,center-1);//新左区间,对低子表递归排序
QSort(L,center+1,high);//新右区间
}
}
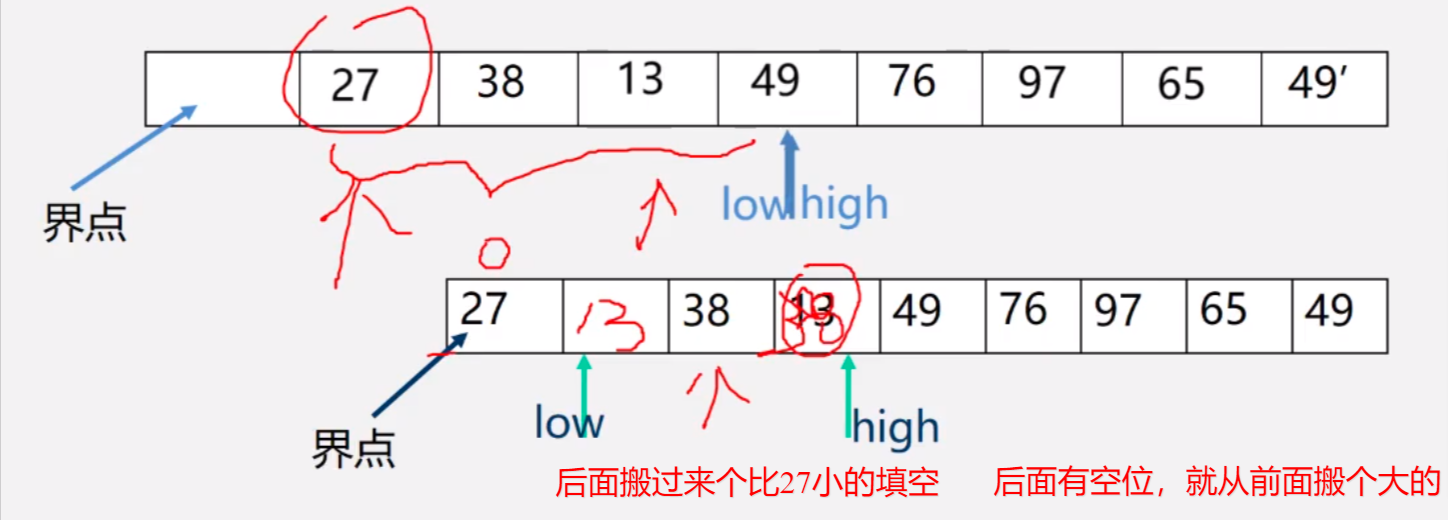
//找中心元素该放置的位置,把比中心点小的放前面,大的放后面
int Partition(SqList &L,int low,int high)
{
L.r[0]=L.r[low];//复制给0号位,相当于空出low位
center = L.r[low].key;//这里的center为中心元素的值大小
while(low<high)
{
while(low<high&&L.r[high].key>=center) high--;
L.r[low]=L.r[high];//把小于0号元素的拿到前面空位,产生后面空位
while(low<high&&L.r[low].key<=center) low++;
L.r[high]=L.r[low];//把大于0号元素的拿到后面空位,产生前面空位
}
L.r[low]=L.r[0];//找到中心元素该在的位置(空着),用0号元素填入
return low;//返回该位置
}
-
时间复杂度,平均为
O(nlog(2)n)- 结果表明:就平均计算时间而言,快速排序是我们所讨论的所有
内排序方法中最好的一个
- 结果表明:就平均计算时间而言,快速排序是我们所讨论的所有
-
空间复杂度
快速排序不是原地排序
由于程序使用了递归(调用系统栈),而栈长取决于递归调用的深度(即使不用递归,也需要用用户栈)
-
- 平均调用情况下要
O(logn)的栈空间
- 平均调用情况下要
-
稳定性:不稳定
选择排序
简单选择排序
基本操作:1. 从n个记录中找出关键字最小的记录,将它与第一个记录交换
2. 从剩余的n-1个记录中找出关键字次小的记录,将它与第二个记录交换
。。。。。。。
算法分析:其中比较次数:无论待排序列处于什么状态,选择排序所需进行的“比较”次数都相同
不稳定
void SelectSort(SqList &L)
{
for(i=1;i<L.length;i++)//共进行n-1趟
{
k=i;//拟定初始最小值
for(j=i+1;j<=L.length;j++)//从第i+1位开始依次待交换(其前面有序)
if(L.r[j].key<L.r[k].key) k=j;//记录最小值位置
if(k!=i) L.r[i]与L.r[k]; //交换
}
}
堆排序
堆的定义
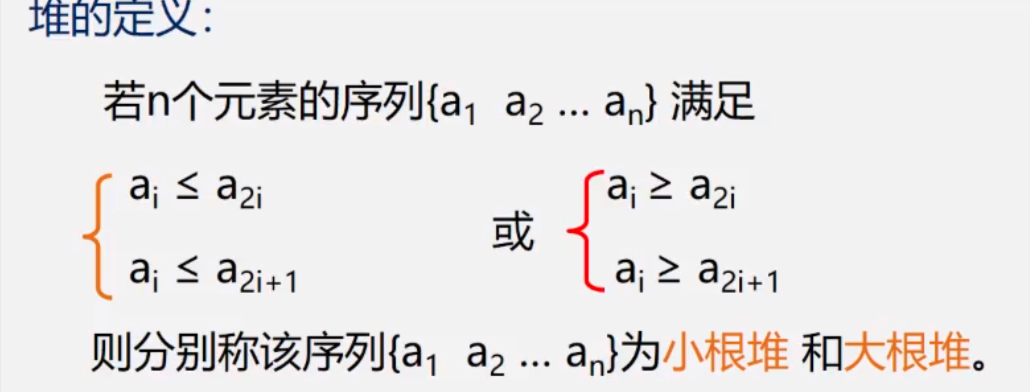
从堆的定义可以看出,堆实质是满足如下性质的完全二叉树(线性表):二叉树中任一非叶子结点均小于(大于)它的孩子结点
堆排序的概念
若在输出堆顶的最小值(最大值)后,使得剩余n-1个元素的序列重新建成一个堆,再得到次小(次大)。。。
实现堆排序需解决两个问题
- 如何由一个无序序列建成一个堆
- 如何输出堆顶元素后,调整元素为一个新的堆
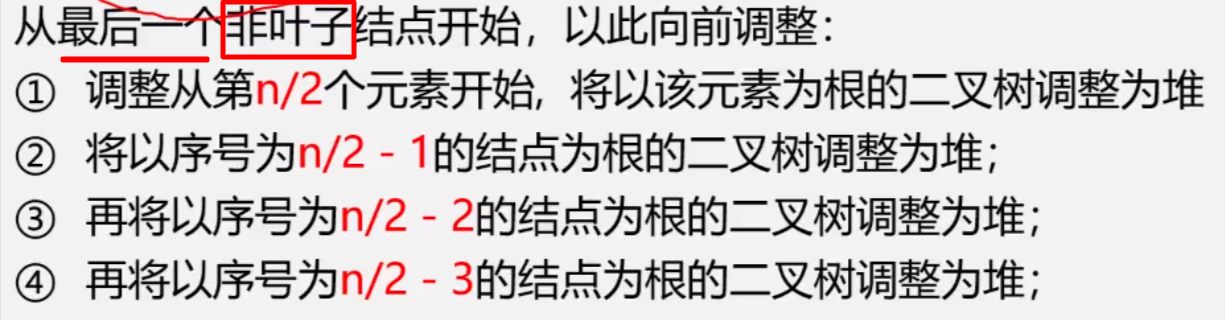
堆的调整(解决问题2)
建立堆(解决问题1)
堆排序算法
void HeapSort(elem R[])//对R[1]到R[n]进行堆排序
{
int i;
for(i =n/2;i>=1;i--)//建立初始堆
HeapAdjust(R,i,n);
for(i=n;i>1;i--)//进行n-1趟排序
{
Swap(R[1],R[i]);//根与最后一个元素交换(后面的元素为有序组)
HeapAdjust(R,1,i-1);//对R[1]到R[i-1]重新建堆
}
}
效率分析
| 类别 | 排序方法 | 时间复杂度 | 空间复杂度 | 稳定性 | ||
|---|---|---|---|---|---|---|
| 最好 | 最坏 | 平均 | 辅助存储 | |||
| 插入排序 | 直接插入排序 | O(n) | O(n^2) | O(n^2) | O(1) | 稳定 |
| 二分排序 | 差 | 优 | O(n^2) | O(1) | 稳定 | |
| 希尔排序 | O(n) | O(n^2) | ~O(n^1.3) | O(1) | 不稳定 | |
| 交换排序 | 冒泡排序 | O(n) | O(n^2) | O(n^2) | O(1) | 稳定 |
| 快速排序 | O(nlogn) | O(n^2) | O(nlogn) | O(nlogn) | 不稳定 | |
| 选择排序 | 简单选择排序 | O(n^2) | O(n^2) | O(n^2) | O(1) | 不稳定 |
| 堆排序 | O(nlogn) | O(nlogn) | O(nlogn) | O(n^2) | 不稳定 | |
| 归并排序 | O(nlogn) | O(nlogn) | O(nlogn) | O(n) | 稳定 | |
| 基数排序 | O(n+m) | O(k*(n+m)) | O(k*(n+m)) | O(n+m) | 稳定 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号