
ROBOTIS DYNAMIXEL XC330-M288-T 舵机介绍(英文)

Features
The XL330 series is a compact and lightweight DYNAMIXEL which is very useful solution when building a small application or operating DYNAMIXELs in a small space.
Unlike previous entry level models, the voltage range is 3.7V ~ 6V and XL330 comes with various operating modes including Current Based Position Control and Current Control.
1.Various Operating Modes
Velocity Control, Position Control, Extended Position Control, PWM Control, Current Control, Current Based Position Control
2.Profile Control for Smooth Motion Planning
3.Input Voltage : 3.7V ~ 6V ( Recommended 5V)
4.Small sized DYNAMIXEL model - Dimension : 20 X 34 X 25 (WⅹHⅹD) [mm] & Weight : 18g
5.Support RC Protocol without additional converting device
6.Energy Saving with Reduced Current
|
Item |
Specifications |
|
MCU |
ARM CORTEX-M0+ (64 [MHz], 32Bit) |
|
Position Sensor |
Contactless absolute encoder (12Bit, 360 [°]) |
|
Motor |
Coreless DC |
|
Baud Rate |
9,600 [bps] ~ 4 [Mbps] |
|
Control Algorithm |
PID control |
|
Resolution |
4096 [pulse/rev] |
|
Operating Modes |
Current Control Mode |
|
Weight |
23 [g] |
|
Dimensions (W x H x D) |
20.0 x 34.0 x 26.0 [mm] |
|
Gear Ratio |
288.35 : 1 |
|
Stall Torque |
0.69 [N.m] (at 3.7 [V], 1.34 [A]) |
|
No Load Speed |
59 [rev/min] (at 3.7 [V]) |
|
Operating Temperature |
-5 ~ +70 [°C] |
|
Input Voltage |
3.7 ~ 6.0 [V] (Recommended : 5.0 [V]) |
|
Command Signal |
Digital Packet |
|
Physical Connection |
TTL Multidrop Bus (3.3V Logic, 5V Compatible) |
|
ID |
253 ID (0 ~ 252) |
|
Feedback |
Position, Velocity, Current, Realtime tick, Trajectory, Temperature, Input Voltage, etc |
|
Case Material |
Engineering Plastic |
|
Gear Material |
Full Metal Gear, 2 Bearing |
|
Standby Current |
17 [mA] |
DANGER
(May cause serious injury or death)
- Never place items containing water, flammables, or solvents near the product.
- Never place fingers, arms, toes, and other body parts near product during operation.
- Cut the power off if the product begins to emit strange odors or smoke.
- Keep product out of reach of children.
- Check input polarity before installing wiring or cables.
CAUTION
(May cause injury or damage to product)
- Always comply with operating environment specifications including voltage, current, and temperature.
- Do not insert blades or other sharp objects during product operation.
ATTENTION
(May cause injury or damage to product)
- Do not disassemble or modify the product.
- Do not drop or apply strong impacts to the product.
- To ensure a stable power supply, it is recommended to use a ROBOTIS controller, or LB-041 battery.
- Do not connect or disconnect DYNAMIXEL cables while power is being supplied.
-
![]()
Model
Stall Torque
No Load Speed
0.76 [N.m] (at 9.0 [V], 0.61 [A])
0.92 [N.m] (at 11.1 [V], 0.80 [A])
1.00 [N.m] (at 12.0 [V], 0.88 [A])52 [rev/min] (at 9.0 [V])
65 [rev/min] (at 11.1 [V])
71 [rev/min] (at 12.0 [V])0.65 [N.m] (at 9.0 [V], 0.61 [A])
0.76 [N.m] (at 11.1 [V], 0.80 [A])
0.80 [N.m] (at 12.0 [V], 0.88 [A])83 [rev/min] (at 9.0 [V])
104 [rev/min] (at 11.1 [V])
113 [rev/min] (at 12.0 [V])0.180 [N.m] (at 3.7 [V], 1.11 [A])
0.215 [N.m] (at 5.0 [V], 1.47 [A])
0.228 [N.m] (at 6.0 [V], 1.74 [A])59 [rev/min] (at 3.7 [V])
81 [rev/min] (at 5.0 [V])
97 [rev/min] (at 6.0 [V])0.180 [N.m] (at 3.7 [V], 1.11 [A])
0.215 [N.m] (at 5.0 [V], 1.47 [A])
0.228 [N.m] (at 6.0 [V], 1.74 [A])95 [rev/min] (at 3.7 [V])
129 [rev/min] (at 5.0 [V])
155 [rev/min] (at 6.0 [V])Model
Stall Torque
No Load Speed
0.42 [N.m] (at 3.7 [V], 1.11 [A])
0.52 [N.m] (at 5.0 [V], 1.47 [A])
0.60 [N.m] (at 6.0 [V], 1.74 [A])76 [rev/min] (at 3.7 [V])
103 [rev/min] (at 5.0 [V])
123 [rev/min] (at 6.0 [V])0.180 [N.m] (at 3.7 [V], 1.11 [A])
0.215 [N.m] (at 5.0 [V], 1.47 [A])
0.228 [N.m] (at 6.0 [V], 1.74 [A])278 [rev/min] (at 3.7 [V])
383 [rev/min] (at 5.0 [V])
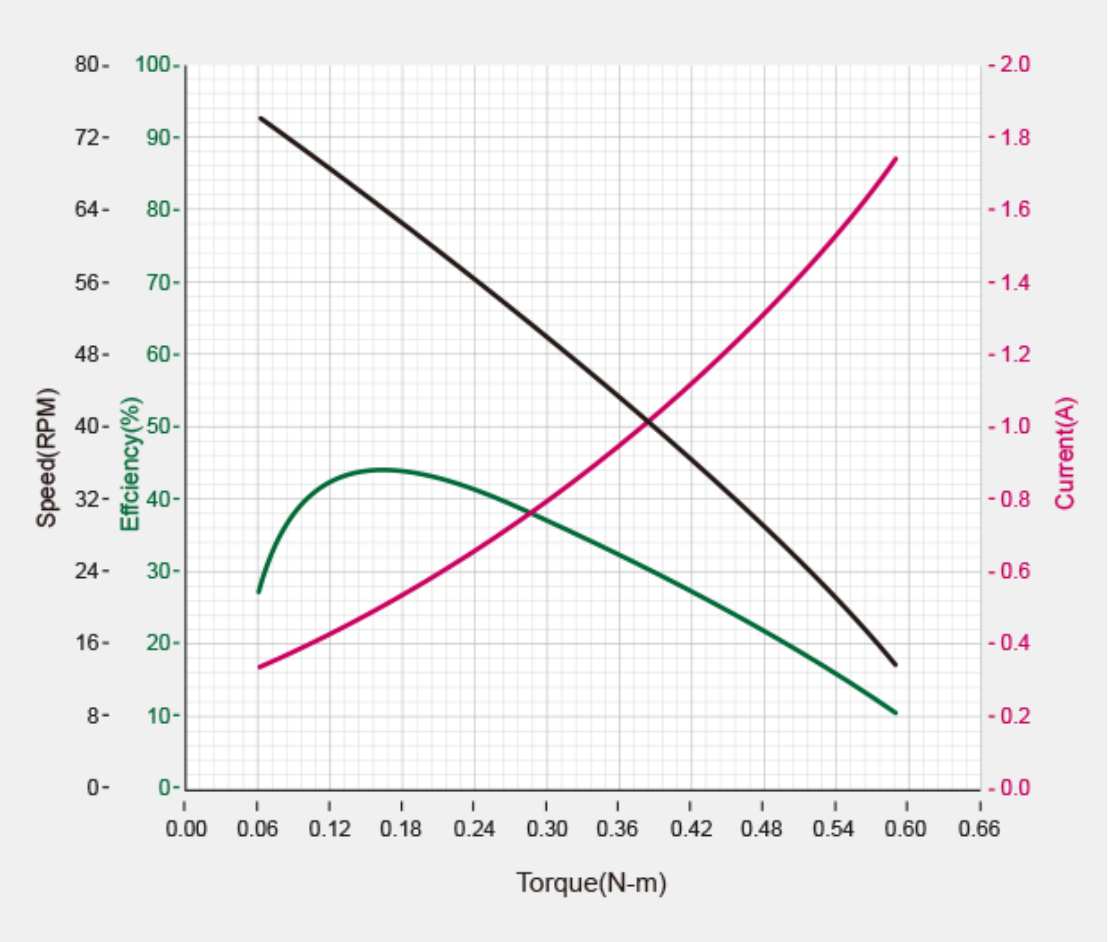
456 [rev/min] (at 6.0 [V])NOTE : The given Stall torque rating for a servo is different from it’s continuous output rating, and may also differ from it’s expected real world performance.
Stall torque is the maximum momentary torque output the servo is capable of, an is generally how RC servos are measured. The Performance graph, or N-T curve, from the above graph is measured under conditions simulating a gradually increasing load.
The actual real world performance of the servo will generally be closer to the performance graph measurements, not the rated stall torque. For this reason, the performance graph is broadly used in the industrial field.
Generally, the Maximum Torque shown through Performance Graph testing is less than the maximum Stall Torque.
CAUTION - When supplying power:
- It is recommended to use a ROBOTIS controller or SMPS2DYNAMIXEL power adapter.
- Do not connect or disconnect DYNAMIXEL actuator cables while power is being supplied.
The Control Table is a structure of data implemented in the device. Users can read a specific Data to get status of the device with Read Instruction Packets, and modify Data as well to control the device with WRITE Instruction Packets.
The Control Table is a structure that consists of multiple Data fields to store status or to control the device. Users can check current status of the device by reading a specific Data from the Control Table with Read Instruction Packets. WRITE Instruction Packets enable users to control the device by changing specific Data in the Control Table. The Address is a unique value when accessing a specific Data in the Control Table with Instruction Packets. In order to read or write data, users must designate a specific Address in the Instruction Packet. Please refer to DYNAMIXEL Protocol 2.0 for more details about Instruction Packets.
-
![]()
![]()
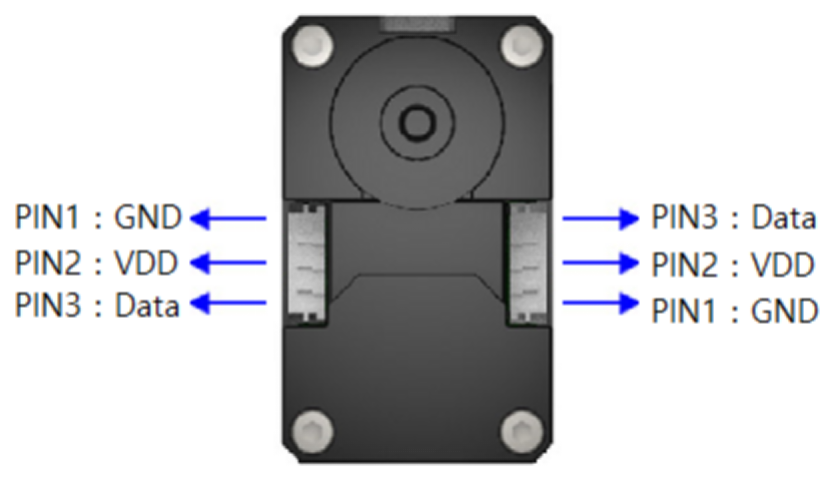
Item
TTL
Pinout
1 GND
2 VDD
3 DATADiagram
Housing
PCB Header
Crimp Terminal
Wire Gauge for DYNAMIXEL
21 AWG
-
![]()
-
智能佳机器人
400 099 1872
- 购买链接:
-

 浙公网安备 33010602011771号
浙公网安备 33010602011771号