Dynamixel XL330 XL430 Robotics的低成本机械臂
原文链接:GitHub - AlexanderKoch-Koch/low_cost_robot
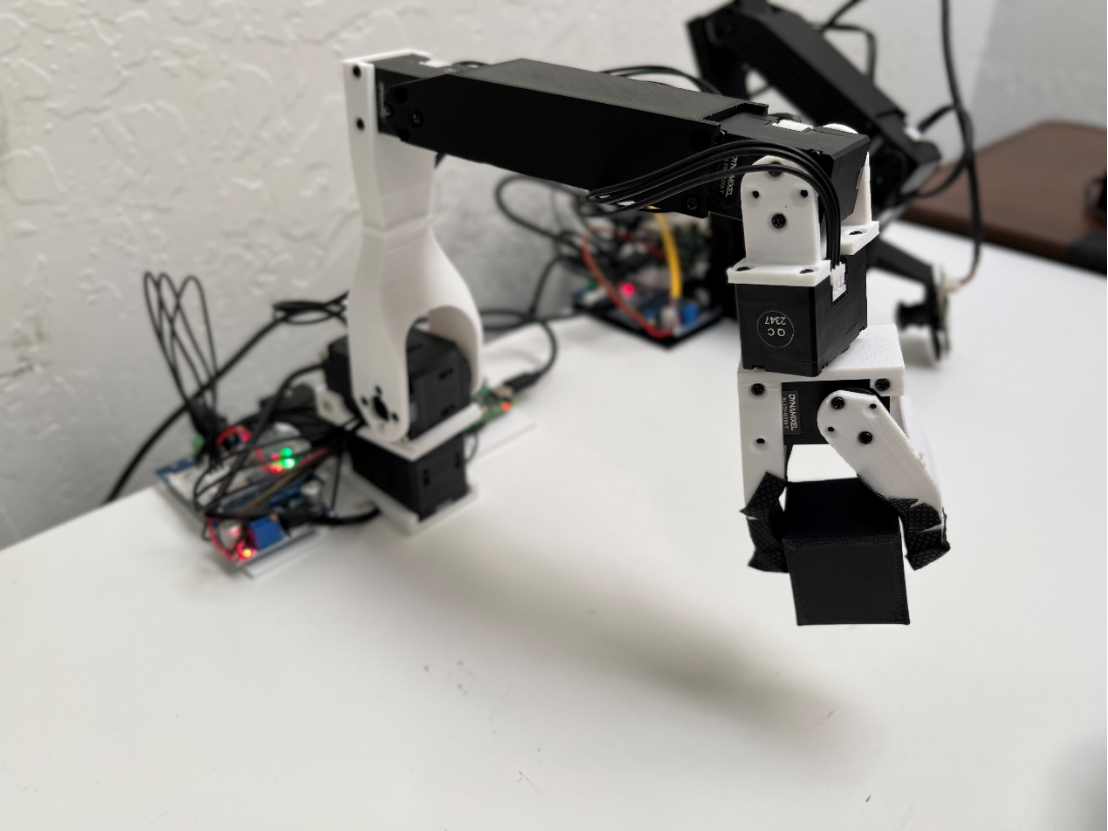
该存储库包含用于构建和低成本机械臂的文件。你也可以建造第二个机械臂(引导臂)来控制另一个臂(跟随臂)。领导者的设计灵感来自GELLO项目,但建造起来更简单。这样的机械臂非常适合机器人学习,其中两只机械手臂也能折叠衣服。
这款机械臂使用的是Dynamixel XL430和Dynamixel XL330伺服电机。XL430电机的强度几乎是XL330电机的两倍,用于前两个关节。XL330电机的强度较弱,但每个电机仅重18克。这使机械臂非常轻盈快速。Dynamixel搭配U2D2适配器,用于将伺服电机连接到计算机。
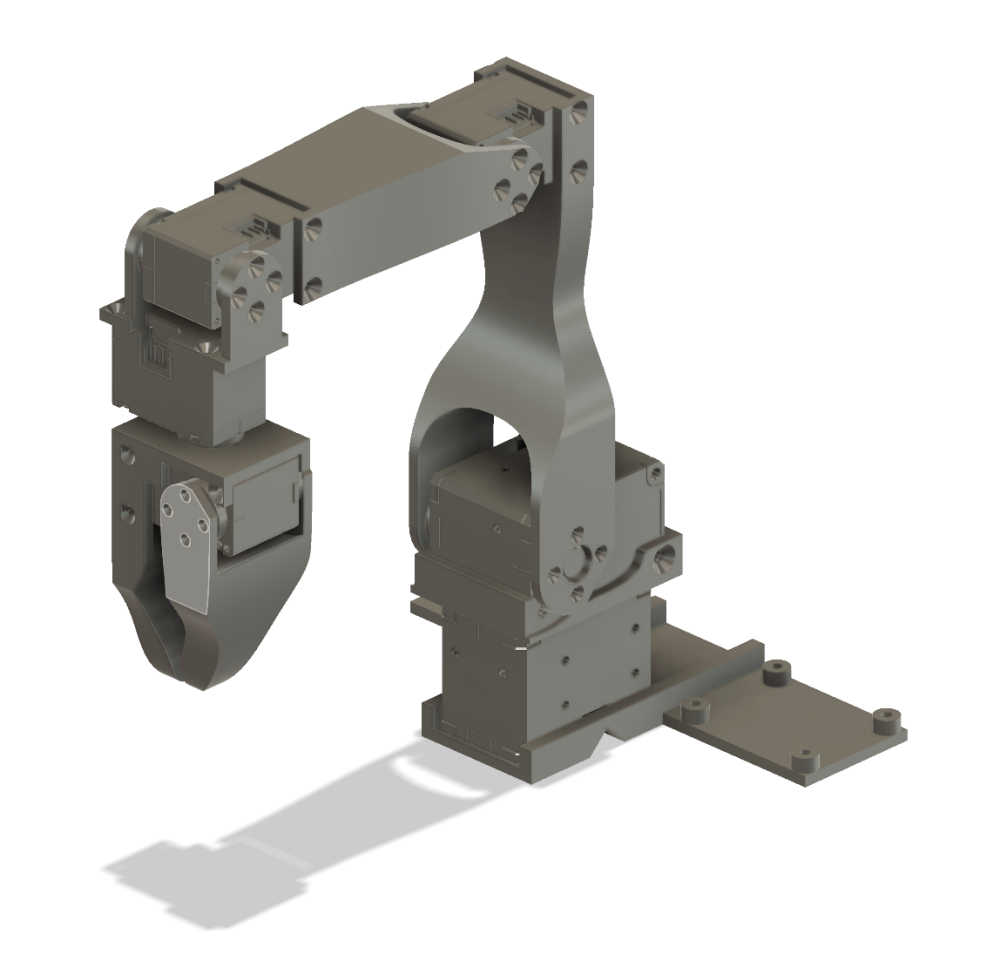
从动臂所需材料
|
名称 |
成本价格 |
购买链接 |
规格 |
|
2*Dynamixel XL430-W250 |
¥499/个 |
||
|
4*Dynamixel XL330-M288 |
¥259/个 |
||
|
XL330 副舵盘 |
¥100 |
注:一包四个;上图中较长版本需要三个(肘部到手腕延伸),组装视频中显示的较短版本需要两个 |
|
|
XL430副舵盘 |
¥75 |
|
|
|
5V启动套件(包含U2D2 和U2D2 PHB Set 和5V电源) |
¥750 |
|
|
|
12V电源 |
¥180 |
|
|
|
桌子夹具 |
|
|
根据需要自己3D打印 |
|
电线 |
¥10 |
装配
装配视频: https://youtu.be/RckrXOEoWrk
1. 使用3D打印机打印所有零件
- STL文件采用硬件/跟随器/STL
- 零件的设计便于打印;只有夹具的移动部分需要支撑
2. 扫描电机
- 将驱动板连接到计算机(应与Linux和MacOS配合使用)
- 计算设备名称(例如,适用于MacOS的tty.usbmodem57380045631):ls/dev/tty*
- 使用Dynamixel向导单独扫描每个电机
² 将所有电机的波特率设置为1M
² 将肩部的伺服ID设置为1,将夹持器伺服的伺服ID设为5(如果使用肘部到手腕的延伸,则为6)
3. 装配
- 组装无底座的臂
² 确保伺服装置固定在与CAD中相同的位置
² 拧入时,伺服喇叭应处于默认位置
- 将导线焊接到降压器上;输入应连接到阴连接器,输出应连接到阳连接器
- 将降压器和伺服驱动器板拧到底座上
- 将底座拧到臂上
- 将驱动器板上的D、v和G端口连接到肩部旋转伺服
- 将肩部旋转伺服装置连接到肩部提升伺服装置
- 将降压器的输入连接到驱动器板上的V和G端口
- 将降压器的输出和驱动器板的剩余D端口连接到弯管伺服
- 将驱动器板连接到电源
- 连接到XL330伺服,在Dynamixel Wizard上查看输入电压,然后调整降压器上的螺钉,直到输入电压为5V
引导臂所需材料
|
名称 |
成本价格 |
购买链接 |
规格 |
|
6*Dynamixel XL330-M077 |
¥259/个 |
||
|
XL330框架 |
¥95 |
|
|
|
XL330副舵盘 |
¥100 |
注:一包四个;三个需要较长的版本(肘部到手腕延伸),两个需要较短的版本,如下图所示 |
|
|
5V启动套件(包含U2D2 和U2D2 PHB Set 和5V电源) |
¥750 |
|
|
|
桌子夹具 |
|
|
根据需要自己3D打印 |
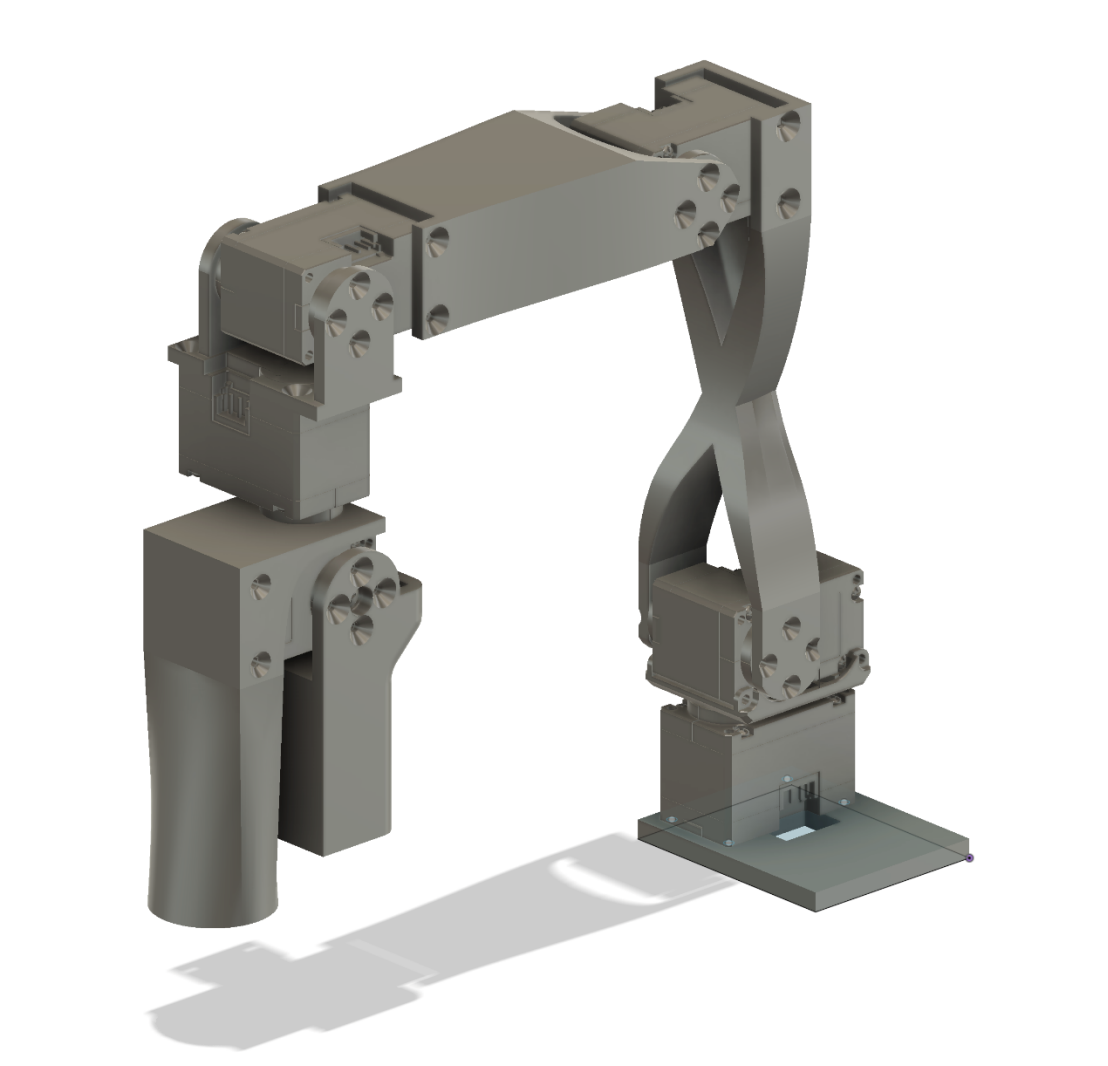
由于所有电机都使用5V电压,因此引导臂的组装更简单。夹具由一个手柄和一个触发器代替。在使用过程中,可以向触发器施加一个小扭矩,使其在默认情况下打开。GELLO的设计使用了弹簧,但组装起来要困难得多。teleoperation.py脚本来测试引导臂。但可能需要调整设备名称。
模拟
MuJoCo中的基本模拟环境可通过simulation.py.运行
智能佳机器人
400 099 1872

 浙公网安备 33010602011771号
浙公网安备 33010602011771号