
使用 ROS2的多机器人探索
原文链接:https://www.youtube.com/watch?v=J0RZP_xJ3XA
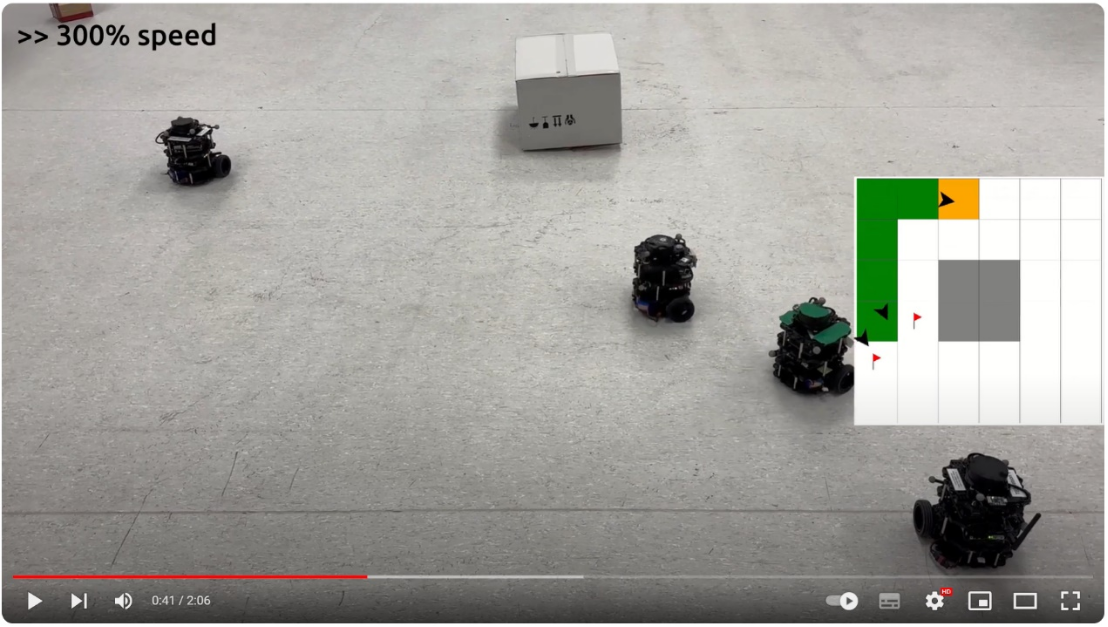
This video shows a demonstration of the SOS project, dedicated to forest fire detection using a fleet of robots. Several important issues are addressed.
这段视频展示了SOS项目的演示,该项目致力于使用机器人车队进行森林火灾探测。讨论了几个重要问题。
It was necessary to develop a way of sharing a map between all the robots, to avoid one robot exploring an area already discovered by another. This shared knowledge also implies a common localization system.
有必要开发一种在所有机器人之间共享地图的方法,以避免一个机器人探索另一个机器人已经发现的区域。这种共享的知识也意味着一个共同的本地化系统。
The demonstration also includes QR Code detection, illustrating the ability of robots to react quickly by interrupting their task to respond to an emergency.
演示还包括二维码检测,展示了机器人通过中断任务以应对紧急情况来快速反应的能力。
To meet these challenges, communication between robots is essential. This enables them to share information on the map and help other robots.
为了应对这些挑战,机器人之间的通信至关重要。这使他们能够在地图上共享信息,并帮助其他机器人。
智能佳 ROS开源智能机器人 TurtleBot3 Burger 汉堡机器人 RPi4开源平台 slam 无人车
智能佳机器人
400 099 1872
淘宝店铺:首页-智能佳机器人-淘宝网 (taobao.com)
企业淘宝店铺:首页-智能佳机器人官方店铺-淘宝网 (taobao.com)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号