智能佳—LoCoBot WX250 6自由度 (用于科研与教学的ROS智能车)
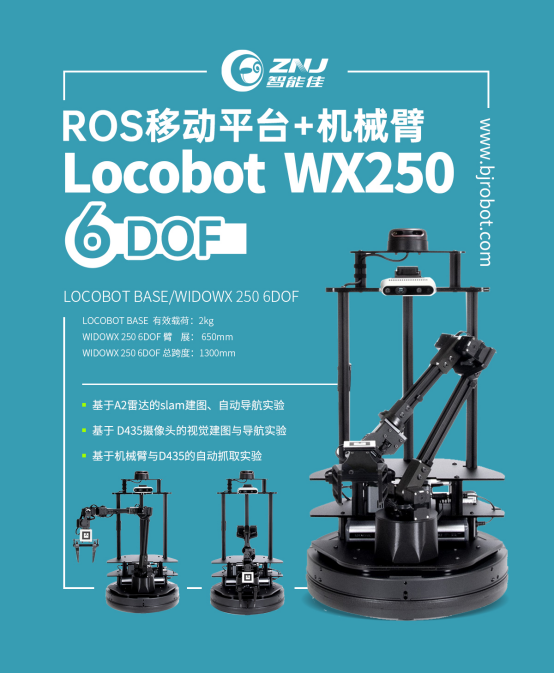
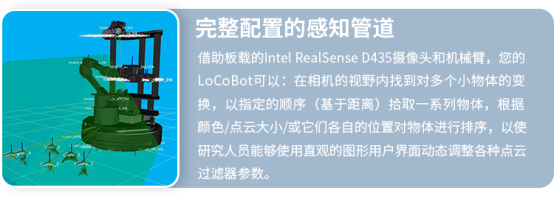
LoCoBot是用于映射、导航和操纵(可选)等ROS研究的智能车,研究人员、教育工作者和学生都可以使用LoCoBot专注于高级代码的开发,而不是专注硬件和构建低级代码。通过开放的源代码软件、完整的ROS映射和导航包以及模块化的开放源代码Python API,LoCoBot上的开发得以简化,用户仅需10行代码即可移动平台和操纵器(机械臂/机械手)。
更多LoCoBot机器人教程请关注智能佳科技bilibili 1. LoCoBot硬件设置_哔哩哔哩_bilibili

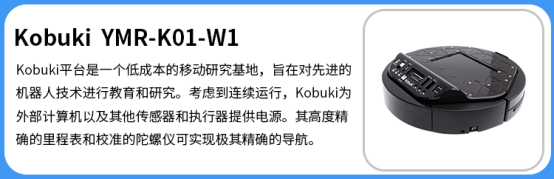
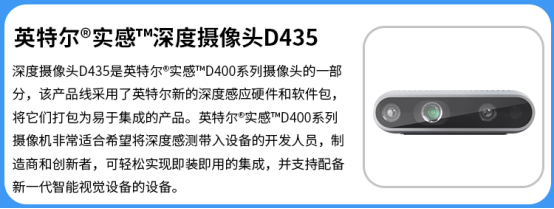
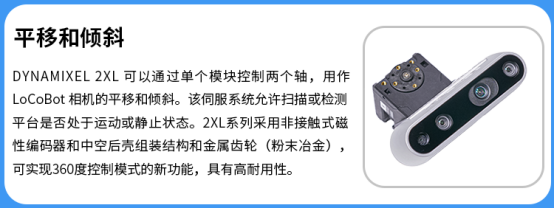
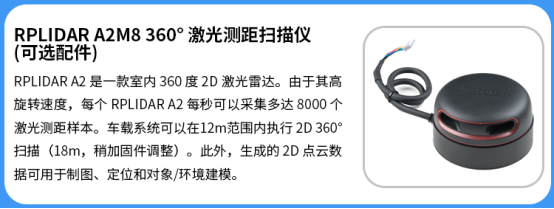
智能车以Yujin机器人Kobuki基地(YMR-K01-W1)为底座, 并由带有8gig内存和240g HD的Intel NUC NUC8i3BEH Core i3供电。英特尔®实感™深度摄像头D435位于平台顶部可以独立控制的平移/倾斜架构上(2XL430-W250-T),可以进行映射和扫描。360度激光雷达(可选)可以进一步改善映射和扫描,以实现更高级的项目。
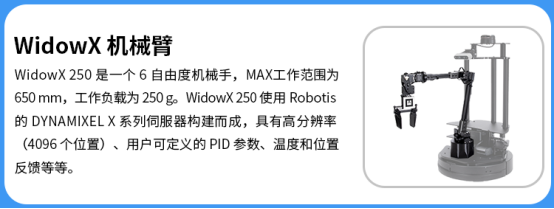
3种不同的机械臂可添加到LoCoBot平台上,提供4、5和6自由度选项。所有的支臂均基于Robotis Co.的X系列伺服器,特别是XM430-W350-T和XL430-W250,它们提供了简便的硬件设置,可用的软件API和其他“智能伺服”优势。

Interbotix产品旨在让用户尽快起步并在ROS上进行开发,因此我们将平台设计成可以在一小时以内即可做好准备进行ROS开源。该机器人仅需必需的很少的硬件设置即可进行预组装,并且在软件中加载了一些终端命令,从而在收到LoCoBot后不到一个小时的时间内您即可进行ROS开发。
规格参数
|
重量 |
待定 |
|
有效载荷(Kobuki) |
2kg |
|
运行时间 |
90 Mins |
|
高度 |
63cm |
|
宽度 |
35cm |
|
长度 |
35cm |
软件




规格参数
LOCOBOT BASE
|
重量 |
待定 |
|
有效载荷(KOBUKI) |
2kg |
|
运行时间 |
90 Mins |
|
高度 |
待定 |
|
宽度 |
35cm |
|
长度 |
35cm |
WIDOWX 250 6DOF
|
自由度 |
6 |
|
臂展 |
650mm |
|
总跨度 |
1300mm |
|
准确性 |
1mm |
|
工作有效载荷 |
250g |
|
重量 |
9lbs |
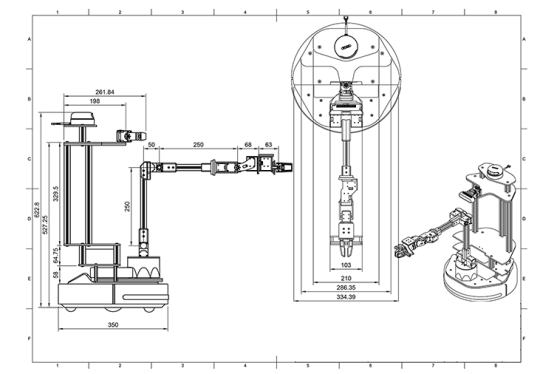
图纸
智能佳机器人
400 099 1872
www.bjrobot.com
购买链接(京东): LoCoBot WX250 6自由度 ROS智能车 Yujin机器人 Kobuki
https://item.jd.com/10027558989947.html


 浙公网安备 33010602011771号
浙公网安备 33010602011771号