LoCoBot Base-Turtlebot 4 Irobot Create3底盘 —新一代教学开源移动平台

今天给大家介绍的是新一代LoCoBot Base-Turtlebot 4开源教学移动学习平台。
TurtleBot 4平台预装和配置了 ROS 2 以及详细的用户文档、Ignition Gazebo 仿真模型、演示代码和一套教程,让开发者可以快速开始开发机器人应用程序。对于想要深入学习的机器人初学者来说,它是一种相对实惠的ROS2入门方式。
该移动平台基于 iRobot 的 Create® 3 构建,并由英特尔 NUC NUC8i3BEH Core i3 提供支持,配备 8gig 内存和 240g HD。英特尔® 实感™ 深度摄像头 D435 位于平台顶部的独立控制的平移/倾斜机构 (2XL430-W250-T) 的顶部,允许映射和扫描。360 度激光雷达(可选)可以进一步改进更高级项目的映射和扫描。
LoCoBot 平台可添加 3 种不同的机械臂,提供 4、5 和 6 个自由度选项。所有机械臂均基于 Robotis 的 X 系列伺服系统,特别是 XM430-W350-T 和XL430-W250,它们提供简单的硬件设置、可用的软件 API 和其他“智能伺服”优势。
Interbotix 产品旨在让用户尽快启动并在 ROS 上进行开发,这就是为什么我们将我们的平台设计为在一小时内准备好 ROS。机器人预先组装好,只需要较少的硬件设置,软件加载了一些终端命令,可以在收到 LoCoBot 后的一个小时内进行 ROS 开发。
软件功能

产品特点
- 外观为单或双层结构,集成化高,无需搭建。
- 基于树莓派4b 2g版,硬件较丰富,配雷达和相机,可扩展支架、摄像头,自带传感器,也可扩展传感器,驱动板硬件不开源。
- 支持ubuntu20.04以上,新版支持较快。
- 适配ros2,代码开源,生态逐步成熟。官方已经集成系统,入门容易。
- ros2功能较新,更新快,更多功能期待丰富。有官方定期升级镜像,可进行快速升级,二次开发整合难度大。
- ros官方社区支持更新快,中文资料待丰富。
- 基于激光的建图算法,基于里程精度较高,时间长,建图效果也较高。
- 里程数据较稳定,导航效果较好
规格 BASE
|
机械手 |
不适用 |
|
有效载荷 (Create 3) |
2kg |
|
工作时间 |
90 Mins |
|
产品重量 |
6.98kg |
|
高度 |
63cm |
|
宽度 |
35cm |
|
长度 |
35cm |
软件
完全配置的导航堆栈
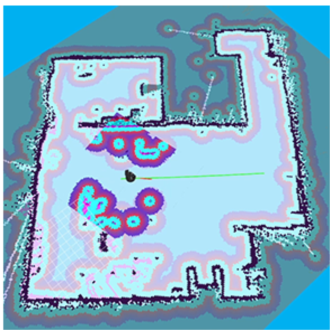
同时定位和绘制其环境(SLAM),在此过程中生成新地图,在预生成的地图中定位自身,创建其周围环境的 3D点云表示(可在 Rviz 中查看),开发本地和用于实时避障和路径规划的全局成本图(可在 Rviz 中查看),自动移动基地以遵循计划的路线,移动到通过鼠标单击 Rviz 中的虚拟地图指定的所需位置

Rviz 可视化环境
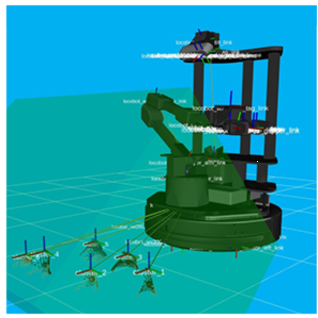
通过在 Rviz 中可视化它的模型来熟悉您的 LoCoBot 平台。使用 Rviz,您还可以查看传感器数据、监控 LoCoBot在导航或感知时的进度以及查看地图。这可以在 LoCoBot 本身上完成,也可以通过 ROS 网络从远程计算机上完成。
完全配置的感知管道
借助板载英特尔实感 D435 摄像头和机械臂,您的 LoCoBot 可以;找到相机视野内多个小物体的变换,按指定顺序(基于距离)拾取大量物体,根据颜色/点云大小/或它们各自的位置对物体进行排序,允许研究人员使用直观的图形用户界面动态调整各种点云过滤器参数。
MoveIt 支持
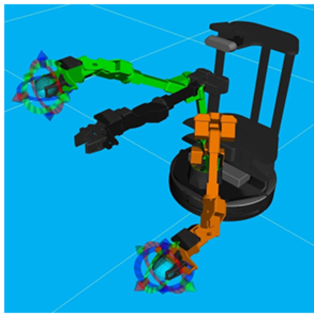
通过使用 MoveIt 来操纵 LoCoBot 上的手臂,抽象出运动规划、反向运动学和碰撞检查。我们的定制 Moveit包已经完全集成,可以在物理机器人和 Gazebo 模拟机器人上与 ROS Control 一起使用。它也可以使用 MoveIt 的 Fake Controller Manager 插件在 Rviz 中进行模拟。

MoveIt Move Group 接口演示
了解如何将 MoveIt 的 Move Group Python 或 C++接口与 LoCoBot 上的手臂一起使用。使用基于 Move Group 的 C++ API 构建的自定义图形用户界面来摆姿势手臂的末端执行器。或者启动一个交互式教程,根据 Move Group的 Python API 将手臂移动到不同的姿势。
硬件

Create 3 from iRobot
欢迎使用下一代 iRobot 经济实惠、值得信赖的一体化移动机器人开发平台。通过对 Create® 3 进行编程以执行简单的行为、声音和动作,或利用包括多机器人探索、导航和映射以及远程呈现功能在内的高级应用程序,掌握机器人技术、计算机科学和工程的基础知识。

英特尔 NUC NUC8i3BEH 迷你电脑
第8代英特尔双核 i3、8GB DDR4 内存、240GB 固态硬盘 (SSD)、英特尔 Iris Plus 显卡 655、Wifi、蓝牙 5.0、千兆以太网、4k 支持、读卡器、支持双显示器、 HDMI、USB、Thunderbolt 3、Ubuntu 20.04。

英特尔® 实感™ 深度摄像头 D435
是英特尔® 实感™ D400 系列摄像头的一部分,该系列采用英特尔最新的深度传感硬件和软件将它们封装成易于集成的产品。英特尔® 实感™ D400 系列相机非常适合希望将深度感应引入设备的开发人员、制造商和创新者,它提供简单的开箱即用集成,并支持全新一代智能视觉设备。

平移和倾斜
是 DYNAMIXEL 2XL 可以通过单个模块控制两个轴,用作 LoCoBot 相机的平移和倾斜。该伺服系统允许扫描或检测平台是否处于运动或静止状态。2XL系列采用非接触式磁性编码器和中空后壳组装结构和金属齿轮(粉末冶金),可实现360度控制模式的新功能,具有高耐用性。
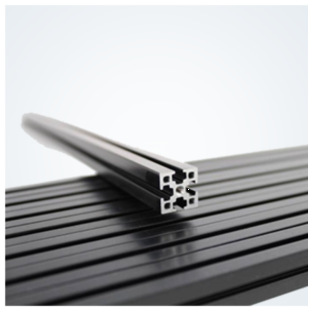
铝结构
LoCoBot 由20x20挤压铝板和3毫米阳极氧化铝板构成,非常耐用。T 型槽铝条具有用于连接其他条、零件或创建安装点以添加到 LoCoBot 的通道。标准20x20柱组件 T 型槽螺母可用于轻松定制平台。
可选配件

RPLIDAR A2M12 360° 激光测距扫描仪(可选)
RPLIDAR A2 是一款室内 360 度 2D 激光雷达。由于其高旋转速度,每个 RPLIDAR A2 每秒可以采集多达 8000 个激光测距样本。车载系统可以在 12 米范围内执行 2D 360°扫描(18m,稍加固件调整)。此外,生成的 2D 点云数据可用于SLAM建图、定位和对象/环境建模。
技术规格
LOCOBOT BASE
|
重量 |
6.98kg |
|
有效载荷 (Create 3) |
2kg |
|
工作时间 |
90 Mins |
|
高度 |
63cm |
|
宽度 |
35cm |
|
长度 |
35cm |
LoCoBot参数对比图

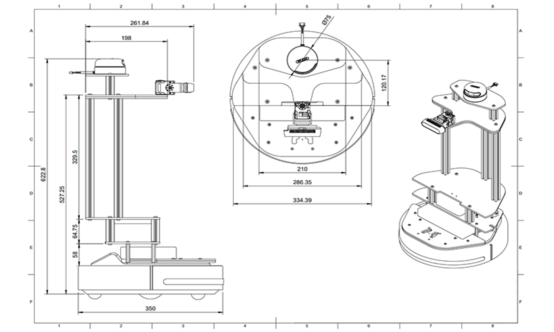
图纸
智能佳机器人
400 099 1872/010-82488500
www.bjrobot.com
详情链接:智能佳(ZNJ) LoCoBot Base机器人ROS智能车 TurtleBot4底盘 slam自动【图片 价格 品牌 报价】-京东 (jd.com)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号