舵机 PID控制参数补充
PID控制是一种非常有用的工具,可用于微调DYNAMIXEL系统的运动行为,以下视频很好地介绍了PID控制的基础知识。
虽然这段视频为理解PID控制中使用的参数提供了一个很好的起点,但我想分享一些关于PID控制的更多信息,这些信息我无法在视频中显示出来。
系统行为
在不同的情况下,每个PID控制系统都会出现一些行为。理解和管理这些行为对于实现DYNAMIXEL系统的最佳性能至关重要。本文将概述您可以在系统中看到的一些行为,以及如何调整它们以最适合您的应用程序。
常态误差
第一个行为示例是由P控制器产生的常态误差。
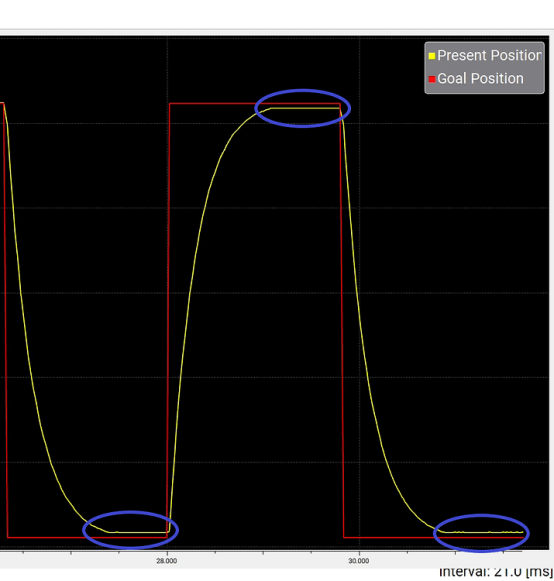
图中带圆圈的部分显示了控制器在未实际达到所需设定点的情况下进入稳定状态的时间段。这是在不使用任何附加I或D参数的情况下使用比例控制器时的常见结果。为了使比例控制器对其受控输出进行调整,它必须能够检测电流输出和设定点之间的差异。当这一差异变得太小时,控制器停止对过程变量进行调整,从而导致这种停止达不到目标的行为。
消除这种稳态误差通常与启用积分增益一样简单,以便不仅基于误差的大小,而且基于误差状态下的总时间来调整输出。
提高比例增益也会解决此行为,但将P增益设置得太高可能会产生另一种有问题的行为。
频率抖动
当P增益设置得太高时,可能会导致伺服系统试图过于积极地保持设定点。
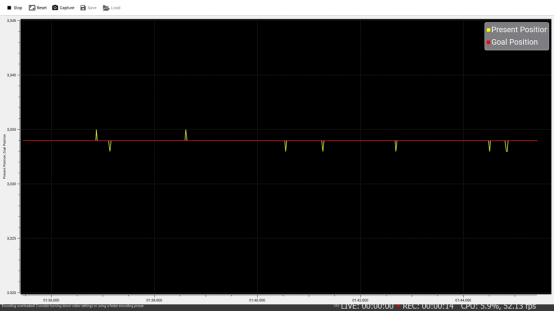
这表现在设定点周围出现这些突然尖峰的图形上,以及具有“咔哒”噪声和大量伺服位置微调的物理伺服上。这是因为执行器试图对其当前位置和期望设定点之间的微小差异进行过校正。伺服检测到它稍微偏离目标,并尝试快速调整到设定点,但由于它已经非常接近,因此超调。然后,现在它实际上偏离了位置,它会迅速回到目标并保持在那里,直到它检测到与设定点的另一个微小差异。
抖动可以通过降低P增益和调整I增益来固定,以减少任何产生的常态误差。
超过/结尾
过冲期望的设定点是PID控制系统表现出的另一种常见行为。
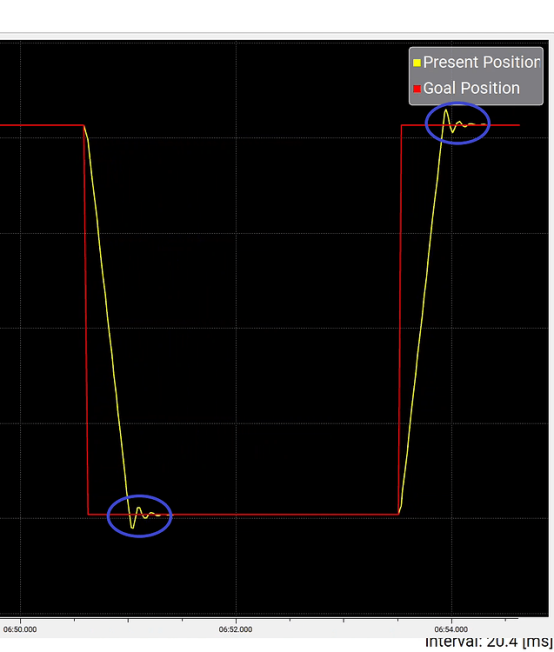
这通常发生在具有较高I增益的系统中,尤其是当从更远的地方接近设定点时。当执行器接近其设定值时,I增益继续增加其对调整输出的影响。当执行器达到设定点时,I增益已增加输出,足以超过目标。然后,一旦累积的I增益调整通过设定点复位,PID控制器就能够快速稳定在目标位置。
可以通过降低I增益或通过调整D增益来缓和较高I增益的影响来减少过冲。
系统不稳定性
不正确调整PID控制系统的最常见症状是设定点附近的振荡模式。
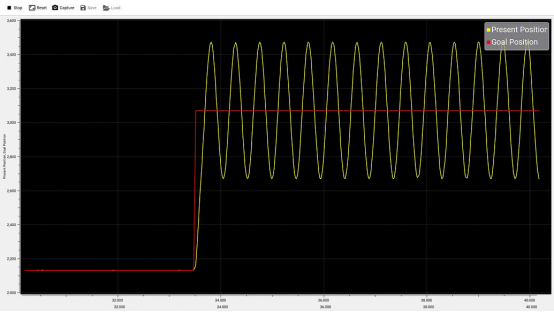
不正确的PID调节通常会导致不稳定的平衡,因为控制器不断超调并自我校正,而从未达到期望的设定点。
消除这种行为的最简单方法是减少I增益,增加P增益。所需的具体调整取决于您的特定系统和实现。PID调整的细节将在即将发布的ROBOTIS CS YouTube视频中讨论,但目前希望这些补充信息足以帮助您开始调整DYNAMIXEL系统的PID设置。
智能佳机器人
www.bjrobot.com
400 099 1872

 浙公网安备 33010602011771号
浙公网安备 33010602011771号