
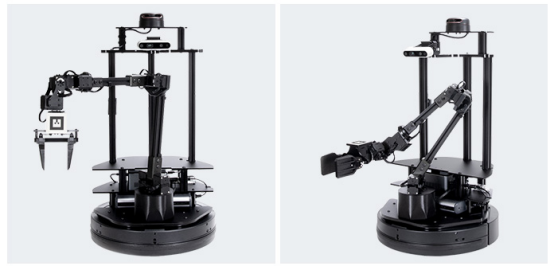
ROS开源智能车LoCoBot WX250+6DOF机械臂
对机器人或人工智能的研究会帮助我们更好的了解人类自己吗?人工智能将会怎样影响我们的生活?诸如此类的问题及文章早已屡见不鲜。但机器人控制如何入门?如何成为一个合格的机器人工程师?要如何制定一个高效全面的机器人学习计划呢?下面为大家介绍一款ROS开源智能车LoCoBot WX250 6DOF。
LoCoBot 是一款用于建图、导航和操作的 ROS 研究漫游车,它使研究人员、教育工作者和学生等能够专注于高级代码开发,而不是硬件和构建低级代码。LoCoBot 上的开发通过开源软件、完整的 ROS 映射和导航包以及模块化开源 Python API 进行了简化,允许用户在短短 10 行代码中移动平台和操纵器。

智能车以Yujin机器人Kobuki基地为底座, 并由带有8gig内存和240g HD的Intel NUC NUC8i3BEH Core i3供电。英特尔®实感™深度摄像头D435位于平台顶部可以独立控制的平移/倾斜架构上(2XL430-W250-T),可以进行映射和扫描。360度激光雷达(可选)可以进一步改善映射和扫描,以实现更高级的项目。
3种不同的机械臂可添加到LoCoBot平台上,提供4、5和6自由度选项。所有的支臂均基于Robotis Co.的X系列伺服器,特别是XM430-W350-T和XL430-W250,它们提供了简便的硬件设置,可用的软件API和其他“智能伺服”优势。

Interbotix产品旨在让用户尽快起步并在ROS上进行开发,因此我们将平台设计成可以在一小时以内即可做好准备进行ROS开源。该机器人仅需必需的很少的硬件设置即可进行预组装,并且在软件中加载了一些终端命令,从而在收到LoCoBot后不到一个小时的时间内您即可进行ROS开发。
规格参数

软 件
机器人操作系统(ROS)
ROS是一个开放源代码的机器人中间件套件。尽管ROS不是操作系统,而是用于机器人软件开发的软件框架的集合,但它提供了为异构计算机集群设计的服务,例如硬件抽象,底层设备控制,常用功能的实现,进程之间的消息传递,和包裹管理。LoCoBot附带了Ubu ntu 20.04 / ROS Noetic的安装程序,它还与Ubuntu 18.04 / ROS Melodic兼容。
完整配置的导航堆栈
定位并绘制其环境(SLAM),在此过程中生成新地图,将自身定位在预先生成的地图中,创建其周围环境的3D点云(在Rviz中可见),开发本地和全局成本图用于实时避障和路径规划(在Rviz中可见),自动移动基地以遵循计划的路线,通过在Rviz中的虚拟地图上单击鼠标单击来移动到所需的地点。 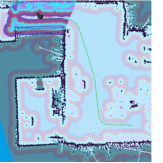
完整配置的感知管道
借助板载的Intel RealSense D435摄像头和机械臂,您的LoCoBot可以:在相机的视野内找到对多个小物体的变换,以指定的顺序(基于距离)拾取一系列物体,根据颜色/点云大小/或它们各自的位置对物体进行排序,以使研究人员能够使用直观的图形用户界面动态调整各种点云过滤器参数。 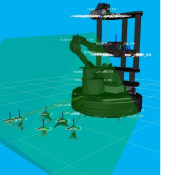
Rviz可视化环境
通过在Rviz中可视化LoCoBot平台的模型来熟悉它。使用Rviz,您还可以查看传感器数据,在LoCoBot导航或进行感知时监视其进度以及查看地图。这可以在LoCoBot本身上完成,也可以通过ROS网络从远程计算机上完成。 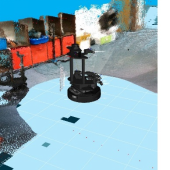
凉亭模拟环境
使用URDF中指定的惯性模型,可以在凉亭中模拟LoCoBot的动力学。通过命令关节位置或向相应主题发送轨迹来控制手臂。或通过将所需的速度发布到差速器驱动器插件来移动基座。
MoveIt支持
通过使用MoveIt操纵LoCoBot上的手臂来抽象运动计划,反向运动学和碰撞检查。我们的自定义Moveit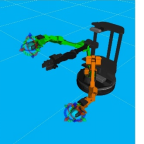
软件包已经集成,可与ROS Control一起在物理机器人
和凉亭模拟机器人上使用。也可以使用MoveIt的Fake
Controller Manager插件在Rviz中对其进行仿真。
MoveIt移动组界面演示
了解如何在LoCoBot上的手臂上使用MoveIt的Move Group Python或C ++接口。使用在Move Group的C ++ API上构建的自定义图形用户界面对手臂的末端执行器进行摆姿势。或启动一个交互式教程,该教程基于Move Group的Python API将手臂移动到不同的姿势。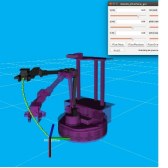
操纵杆控制
通过Sony PS4控制器控制LoCoBot如何从包装箱中移出。使用控制器,您可以驱动Kobuki基座,在笛卡尔空间中操纵手臂或平移/倾斜摄像机伺服器。您还可以在映射其环境时使用它来手动驱动机器人。
Interbotix Python API
即使您不熟悉ROS,也可以使用我们的自定义Python,API以不到十行的代码来启动和运行LoCoBot平台。在单个脚本中,您可以命令基础导航到地图上的特定点,使用摄像头查找小物体,用手臂将它们拾取,然后将其放入地图中其他位置的垃圾箱中。
硬 件
WidowX 250机械臂
ROS兼容的6DOF机械手从基座中心到抓手的水平距离为65cm,总跨度为130cm。WidowX 200臂的有效负载为250g,静止时的精度约为1mm。WX250机械臂是拾取中等重量物体的理想机械手。
一套包装中的两个机器人
WidowX 250机械手可以独立于LoCoBot进行操作(需要额外的电源)。将机械手与机器人的底座分开可以同时开发两个平台。
铝结构
LoCoBot由20x20挤压铝板和3mm阳极氧化铝板制成,非常耐用。T型槽铝条具有用于连接其他条,零件或创建用于添加到LoCoBot的安装点的通道。可以使用标准的20x20组装后T形槽螺母来轻松定制平台。
Kobuki YMR-K01-W1
Kobuki平台是一个低成本的移动研究基地,旨在对先进的机器人技术进行教育和研究。考虑到连续运行,Kobuki为外部计算机以及其他传感器和执行器提供电源。其高度精确的里程表和校准的陀螺仪可实现极其精确的导航。
英特尔NUC NUC8i3BEH迷你PC
第8代Intel双核i3、8GB DDR4 Ram,240GB固态硬盘(SSD),Intel Iris Plus Graphics 655,Wifi,蓝牙5.0,千兆以太网,4k支持,读卡器,支持双显示器,HDMI,USB,Thunderbolt 3 ,Ubuntu 20.04。
行动电源185Wh / 50000mAh(最大130W)
用于外围设备(机械手,摄像机,云台/俯仰)的直流电源银行超高容量50000mAh(3.7V)/ 185Wh(MAX 130W)。内置多重保护功能,包括过载保护,过电流,低电流保护等。UL认证,用于电池的UL1642和用于移动电源安全的UL2056。
摇摄和倾斜相机
DYNAMIXEL 2XL可以通过一个模块控制两个轴,该模块可以用作LoCoBot摄像机的云台。无论平台处于运动状态还是静止状态,该伺服系统都可以进行扫描或物体检测。2XL系列采用了新功能,其非接触式磁性编码器和中空后壳装配结构可实现360度控制模式,并且使用金属齿轮(粉末冶金)实现了高耐用性。 
DYNAMIXEL U2D2
USB通信转换器,可控制和操作DYNAMIXEL伺服器(平移和倾斜/可选的机械手控制)。它同时支持3Pin TTL连接器和4Pin RS-485连接器,以与各种DYNAMIXEL链接。
英特尔®实感™深度摄像头D435
深度摄像头D435是英特尔®实感™D400系列摄像头的一部分,该产品线采用了英特尔新的深度感应硬件和软件包,将它们打包为易于集成的产品。英特尔®实感™D400系列摄像机非常适合希望将深度感测带入设备的开发人员,制造商和创新者,可轻松实现即装即用的集成,并支持配备新一代智能视觉设备的设备。 
RPLIDAR A2M8 360°激光范围扫描仪(可选)
RPLIDAR A2是室内360度2D LIDAR。每个RPLIDAR A2都具有很高的旋转速度,每秒 MAX 可以采集8000个激光样本,范围是每秒。车载系统可以在12米(18m的距离,并经过一些固件调整)范围内执行2D 360°扫描。此外,生成的2D点云数据可用于映射,本地化和对象/环境建模。
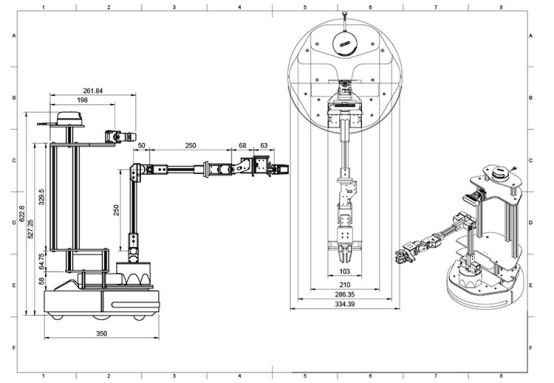
产品图纸
详情咨询:
智能佳机器人
www.bjrobot.com
400-099-1872

 浙公网安备 33010602011771号
浙公网安备 33010602011771号