
受蚂蚁启发的四足机器人链接在一起克服障碍
机器人可以将它们的身体连接在一起以跨越间隙或攀爬障碍物,此外它们还可以一起举起物体 University of Notre Dame
如果觅食的蚂蚁遇到一个太大而无法自行穿越的间隙,昆虫有时会向其他蚂蚁发出信号,让它们的身体相连形成一座桥梁。 这种行为现在已被复制到一个小型四足机器人中,这可能有一天会激发更好的搜索和救援机器人。
四足机器人与轮式机器人相比肯定有一些优势,包括它们可以在穿越崎岖地形时跨过障碍物。 因此可以设想,这种机器人的协作“群”最终可以用于诸如在灾难现场搜索幸存者等应用中。
然而,即使是有腿的机器人,仍然会被深渊或太陡而无法攀爬的障碍物阻止。 考虑到这些限制,圣母大学的助理。 Yasemin Ozkan-Aydin 教授构建了一批 3D 打印的四足机器人,它们可以协同工作来绕过这些挑战。
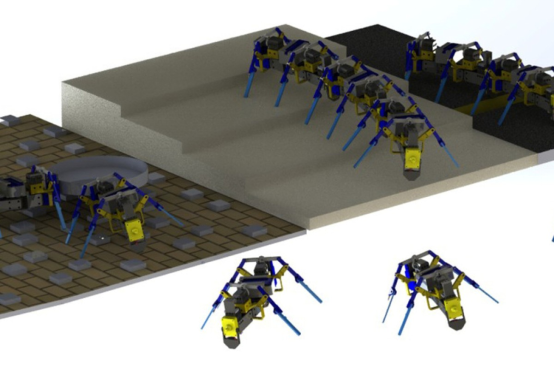
每一个的长度为 15 到 20 厘米(6 到 8 英寸),并包含一个锂聚合物电池、一个微处理器、一个前置光传感器,以及一个前部和后部的磁性触摸传感器。 当机器人被粘在刨花板上的木块等测试物品卡住时,它会向附近的其他机器人无线发送信号。
一旦这些机器人到达,它们就会使用磁性触摸传感器来确定它们彼此之间的方向,并将它们的身体以链的形式连接在一起。 通过这种方式,它们可以形成一个跨越间隙的桥梁或一个障碍攀爬列车,而且它们甚至可以一起工作来搬运单个机器人无法管理的太大或太重的物体。
Ozkan-Aydin 现在正致力于提高她的群体机器人系统的灵敏度、协作能力和电池电量。 除了在搜索和救援行动中的使用外,它最终可能会用于太空探索、环境监测或研究蚂蚁和白蚁等昆虫的集体动态等应用。
有关该研究的论文最近发表在《科学机器人》杂志上。
资料来源:圣母大学

 浙公网安备 33010602011771号
浙公网安备 33010602011771号