多智能体自主协同技术
群体智能系统简介:
该套系统是为群体智能研究和多机器人任务协同研究搭建的一个基础科研平台,该系统完全开放软硬件接口,提供人机交互软件控制系统中智能机器人的路径规划、自主避障、智能跟随、自动循迹、群体协作等群体智能算法所需要的的位置、方向、速度、加速度等数据接口,高度支持二次开发和科研任务移植。该系统为群体智能研究提供模拟仿真平台,可实现群体智能算法的实物验证,以为群体智能算法的推广应用提供了实际案例和数据支撑。

![]()
应用领域:
智慧医疗、智慧城市、智能交通、在军事战略领域以及科研领域。
|
科学研究 |
|
群体智能算法 |
|
多机器人智能协同 |
|
智能群体模拟演练 |
|
消防演练 |
|
人员自动流动(疫情传播模拟) |
|
体育运动模拟(接力赛、足球赛、基于跟随) |
|
智能交通 |
|
物流分配模拟 |
|
模拟建模 |
|
自然群体(蚁群,鱼群,鸟群,细菌) |
|
分子扩散(有害气体) |
|
消息传播模拟 |
|
游戏娱乐 |
|
迷宫地图 |
|
棋子类游戏(跳棋等) |
重点可以研究以下课题:
智能机器人自主感知、组网算法
多机器人目标协同定位算法
多机器人自主决策路径规划算法
多机器人区域覆盖算法
智能蚁群算法
微粒群优化算法
蚁群聚类算法
多智能体协同算法
单片机微机原理和编程语言
各种通信协议和通信方式
电机和传感器等硬件资源的应用
![]()
![]()
系统收益:
通过实物的实验,帮助验证群体智能算法。群体智能是一个复杂的学科, 涉及到很多细节,通过实际的实验,可以促进验证群体智能算法的可行性。
群体机器人平台可以实现深度学习、机器学习、人工智能、协同定位、区域覆盖、任务规划、资源分配、通信方式等算法的验证,保证实验平台的多样化,可进行大部分学科的实验,很适合学校进行科研实验。
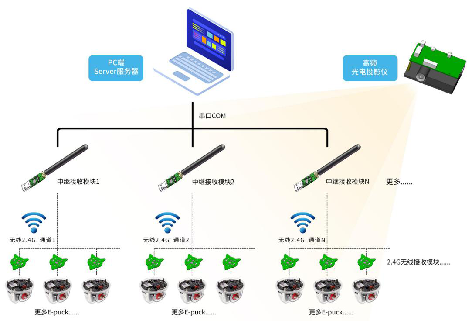
系统架构和功能:本系统分为机器人系统、高频投影定位系统、无线通讯控制系统、群体智能决策软件系统
机器人是实验控制对象,是算法实现的载体;高频投影定位系统是机器人位置感知与定位的主要系统,通过高频光谱采集机器人位置、朝向、速度等数据信息;无线通讯控制系统负责上位机和机器人之间的通讯,连接数据的采集和数据的发送,使整个系统成为一个闭环。群体智能决策软件系统相当于整个系统的大脑,综合收集到的信息控制机器人之间的运动关系,经过决策后发出机器人执行的指令。
![]()
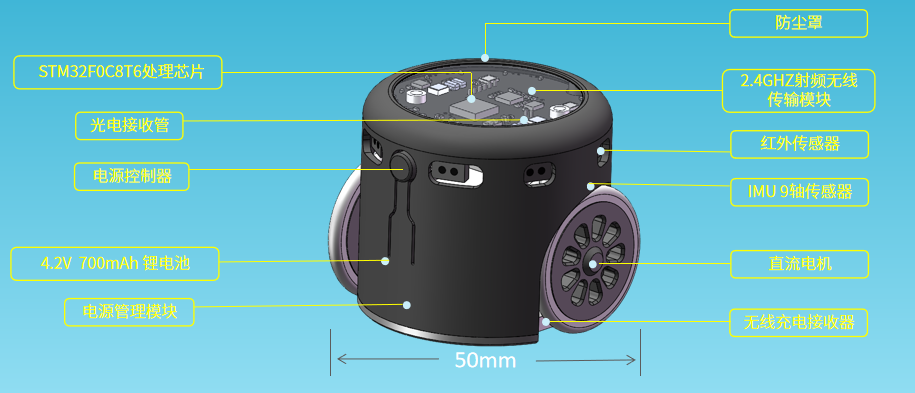
ROBO-MAS智能机器人搭载光电定位传感器、红外避障传感器、9轴惯性传感器模块、主控芯片处理器、无线充电模块、射频无线通信模块、电池管理模块、电机驱动、直流电机、编码器以及防尘罩和2个步进电机车轮。可实时检测机器人的位置、方位角、速度和加速度等信息,经处理器采集处理后通过无线射频通信模块实时反馈至上位机软件控制系统作为路径规划、避障、跟随和循迹等控制算法的原始数据来源。
主要功能:实时定位、自主避障、路径规划、智能跟随/用户控制、自动循迹/路径匹配、一键充电/自主返航充电等功能
![]()
|
特征 |
ROBO-MAX |
|
尺寸,重量 |
直径50毫米,高46毫米,72克 |
|
电池,充电 |
4.2V 700mAh锂电池; USB充电,续航时间30分钟。 |
|
处理器 |
32位STM32F0C8T6处理器 |
|
轮圈 |
车轮直径= 30mm |
|
速度 |
10-25cm/秒 |
|
机械结构 |
相同的机制 |
|
传感器 |
两个光电传收传感器 |
|
6个红外传感器 |
|
|
IMU |
3轴加速度计,3轴陀螺仪,3轴磁力计 |
|
发光二极管 |
RGB指示灯 |
|
通讯 |
USB全速,蓝牙2.0,BLE,WiFi |
|
存储 |
Micro SD插槽 |
|
遥控 |
红外接收器,用于标准遥控命令 |
|
程式设计 |
免费的C编译器和IDE,Webots模拟器,板载调试器(GDB) |
|
机械结构 |
透明塑料主体,支持PCB,电池和电机 |
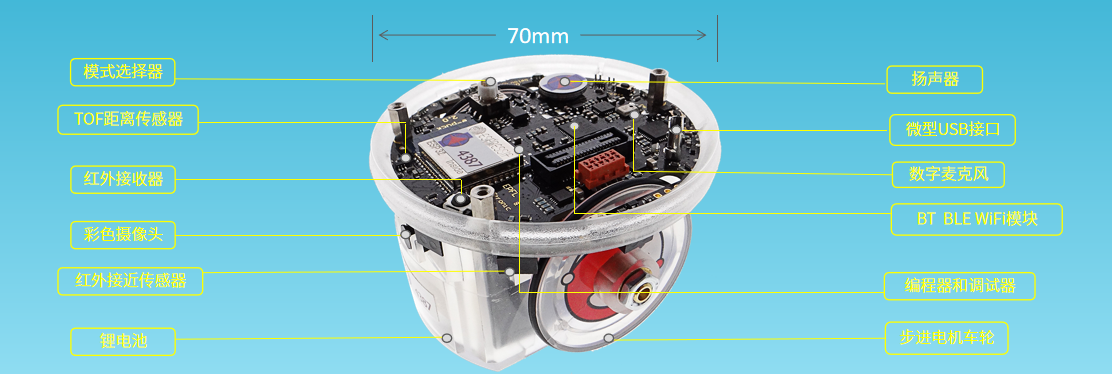
E-puck2.0嵌入式机器人 :E-PUCK 2.0为高端桌面型嵌入式机器人,可以在有限的空间内融入大数量的智能机器人进行群体协作实验,凭着其在任务适用性、经济性、稳定性、可拓展性、软件开放性强等有极大的优越性,可在已知环境下的任务动态分配和再分配研究,任务预测与任务分解研究,以及异构大规模系统和复杂任务分配研究等具有巨大优势。E-PUCK 2.0虽然体积小,但配有多种先进的传感器,例如:彩色摄像头、WiFi、蓝牙、红外传感器、TOF距离处理器、USB数据口、IMU、麦克风、扬声器、LED灯、步进电机车轮等,内置标准的Linux运行系统,提供标准C/C++语言开发环境。
主要功能:自由行走、避障、语音报警、视觉处理、多机器人协作可用于移动机械工程、实时程序、信号传递、影像传递、声音和影像组合、人机互动、机器人内部交流等
![]()
|
特征 |
e-puck2.0 |
|
尺寸,重量 |
直径70毫米,45毫米,130克 |
|
电池,充电 |
相同的电池; USB充电,充电时间约2.5h。 |
|
处理器 |
32位STM32F407 @ 168 MHz(210 DMIPS),DSP和FPU,DMA |
|
记忆 |
内存:192 KB; 闪存:1024 KB |
|
电机/转速 |
2个带有50:1减速齿轮的步进电机; 每转20步; 约0.13毫米分辨率 |
|
轮圈 |
车轮直径= 41毫米 轮距= 53mm |
|
速度 |
最大值:1200步/秒(约15.4厘米/秒) |
|
机械结构 |
相同的机制 |
|
距离感应器 |
相同的红外传感器 |
|
前部真实距离传感器,战斗时间(ToF),最长2米。 |
|
|
IMU |
3D加速度计,3D陀螺仪,3D磁力计 |
|
相机 |
VGA彩色相机;典型用途: 52x39 or 480x1 |
|
音讯 |
4个全向微hpones(数字),用于声音定位 |
|
能够播放WAV或音色的扬声器 |
|
|
发光二极管 |
机器人周围有4个红色LED和4个RGB LED,绿灯,前面有1个强红色LED |
|
通讯 |
USB全速,蓝牙2.0,BLE,WiFi |
|
存储 |
Micro SD插槽 |
|
遥控 |
红外接收器,用于标准遥控命令 |
|
模拟选择器 |
16位旋转开关 |
|
扩展名 |
支持所有扩展 |
|
程式设计 |
免费的C编译器和IDE,Webots模拟器,板载调试器(GDB) |
|
机械结构 |
透明塑料主体,支持PCB,电池和电机 |
高频投影定位系统:
高频投影定位系统包含两个子系统,光引擎系统和驱动系统,以及散热器和风扇等设备。高频投影仪系统可用于三维重建、三维测量、平面定位等。三维重建和测量主要是通过高频投影仪将结构光投影至被测物体上,并通过摄像机进行拍摄,并根据三维坐标和二维坐标的转换得到其深度。平面定位是一套定位毫米级的定位系统。
技术参数: 1.光引擎包括:红色、绿色和蓝色光谱;以及912×1140钻石像素0.45英寸结构光超分辨显微镜。 2.驱动系统含LED驱动电路,数字控制器,电源管理电路,DVI TO RGB转换等设备。 3.含高频播放的格雷码编制的黑白条纹图片序列。 4.含播放格雷码编制图片序列的配置文件。 5.标准投影面积为长 1500mm 宽960mm,横坐标像素点定位精度为1.67mm 纵坐标像素点定位精度为1.69mm。 6.提供高频投影实现平面定位的操作说明手册。

![]()
无线通讯控制系统 :
群体智能无线通讯控制系统含单体智能无线接收模块和USB中继接收模块。单体智能无线接收模块是智能定位和智能组网模块,通过串口通讯加装在ROBO-MAS微型移动机器人上,来实现微型机器人的定位和通信组网。它内含光电接收传感器、STM32F0C8T6处理器、NRF24L01+通信芯片、板载2.4GHZ天线、电源管理芯片等。 USB中继接收模块是一款通信中间件模块,它与PC端采用USB接口连接方式,PC端软件通过该模块能够查询或设置ROBO-MAS机器人,中继接收模块能够实时管理查询多个微型移动机器人。
群体智能决策软件系统:
群体智能决策软件系统是多智能体自主协作仿真以及实物验证的软件平台系统,用于多机器人群体行为决策的仿真、机器人路径规划、机器人状态显示等,实现对多个微型移动机器人间通讯管理和信息交互。
群体智能决策软件系统分为:应用层、仿真层、服务层、通讯层。
应用层提供二种协作案例(图形模式、手绘模式)和底层二次开发模式,仿真层含机器人节点的新增、删除,机器人的路径规划,机器人目标点设置等。服务层包含软件系统获取机器人本体的位置和状态。通讯层包含软件系统与中继接收模块之间的通信。
实验场景:
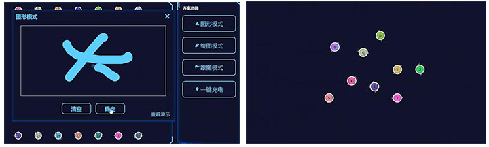
为方便用户快速熟悉群体智能协作平台,直观展示群体智能的运用与开发内容,我们提供两种协作模式,以及复杂算法的二次开发底层代码
图形模式:在上位机软件上选择 机器人自动根据配置数量排列出对应形状 如:圆形、五角形、六边形、正方形。
手绘模式:在上位机显示的窗口内画图或写字,系统会自动分析、识别图形,根据机器人的数量自动排列出对应图案 二次开发:提供底层通讯协议和API接口,以及相关demo。
(1)提供机器人端与群体智能协作系统的通信协议。
(2)提供机器人模块目标速度控制接口
(3)提供机器人模块目标角度控制接口
(4)提供机器人单体避障算法与demo
(5)提供机器人群体队列保持算法demo
(6)提供机器人跟随算法demo
(7)提供高频定位系统平面坐标输出接口demo
(8)图形模式算法demo(自主路径规划)
(9)画图模式算法demo(自主路径规划)
(10)实时手势控制算法demo。
(11)环境感知:协同感知算法demo

![]()
![]()
视频观看:https://www.bilibili.com/video/BV1Cv411y7uL
实验室效果图:

![]()

![]()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号